方案体积达标。载重率甚至逼近理论极限。现场却直接停摆。
后交付批次的托盘被算法优先塞入车厢最深处。叉车臂伸不进去。重型货箱毫无遮挡地压在易碎品类上方。临时倒柜。装卸动线彻底断裂。延误交付成了必然结果。计划表上的各项填充指标看起来相当完美。执行端的物理空间却打成死结。
咱们往往把注意力放在二维表格汇总的容积率指标以及运输成本核算上面。计划人员习惯凭借这些静态数据开展签批工作。现场装卸团队所依赖的实际是货物在车厢内的物理拓扑序列、卸货动线走向以及搬运设备的机械限制。这两套评价体系之间缺失了一个翻译层。也就是关于“顺序约束”以及“操作视角”的映射机制。数据层面的最优解一旦撞上实体装卸场景。往往会直接失效。算法模型并不会主动去考虑叉车司机的实际方向盘转动幅度。也不会把地牛的最小回转半径当作硬性条件纳入计算范畴。
进入计算前的货物数据录入阶段。也就是在 Loadvis 的 edit 模块当中进行参数配置的时候。很多操作人员只是把基础外廓尺寸以及计划数量直接填进去就算了。这种做法存在极大程度上的隐患。必须在货物录入的初始环节就把同类或者同批次的货载进行分组规则的划定工作。并且要把“同类/同组不拆分”的逻辑参数进行强制设定。借助产品库标签或者计划预设参数来提前完成边界切割。这是让卸货顺序得以实现的最底层数据支撑。如果不在源头把分组标签打上去。后续所有关于堆叠顺序的优化动作都会变成无源之水。
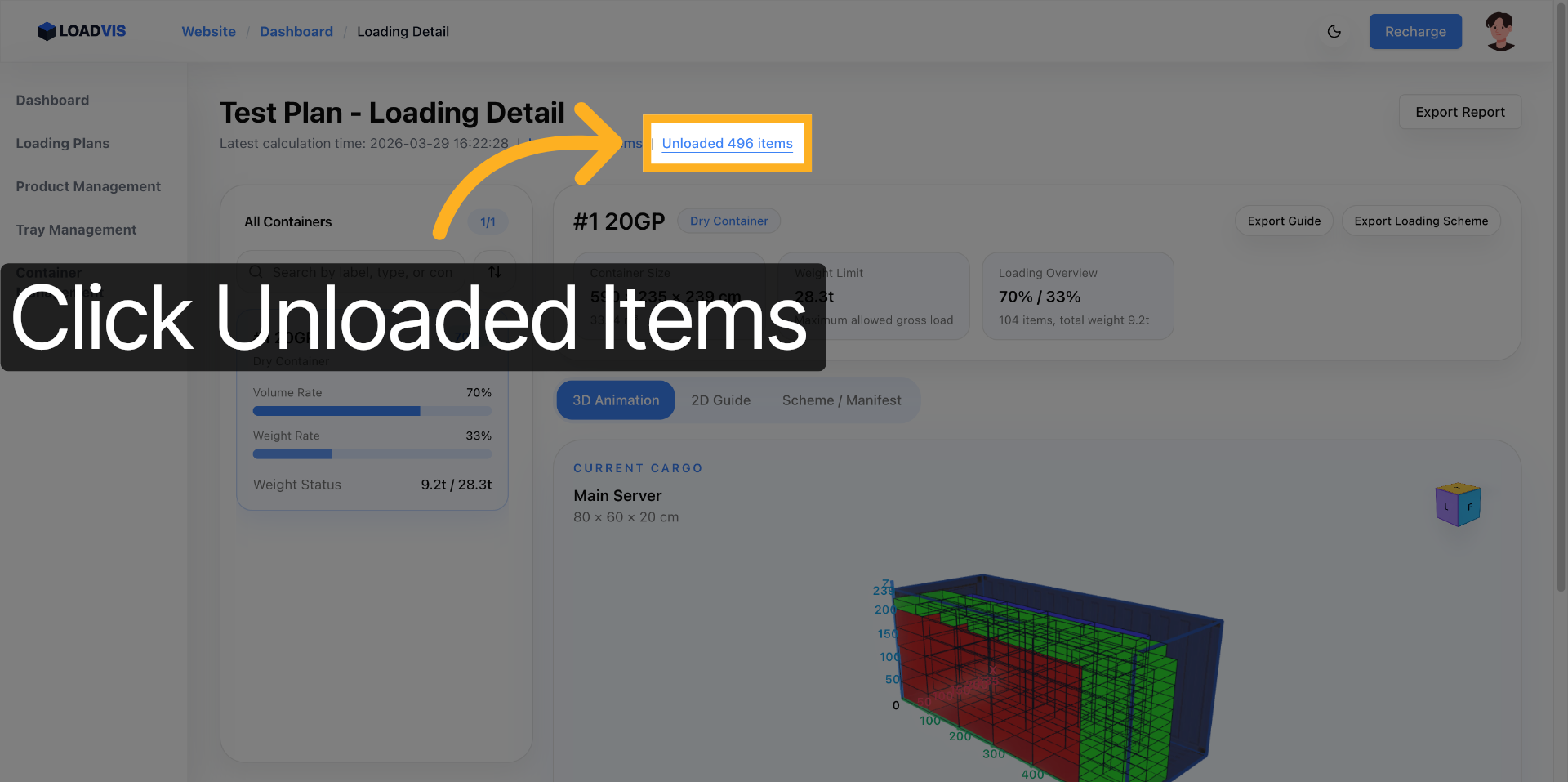
计算指令下达完毕之后。审查工作必须马上转移到 detail 模块进行展开。这里有一个强制性的操作习惯。那就是必须把“已装”以及“未装”的货物明细清单完整调出来。不少使用者看到“未装”数值就以为系统出现了故障。这种误判要不得。未装状态其实是系统在多重约束条件发生严重冲突的时候所触发的拦截结果。必须逐项对未装缘由开展核对工作。去判断究竟是纯粹的空间体积溢出。还是重量分配上限以及分组保护规则触发了系统阻断。
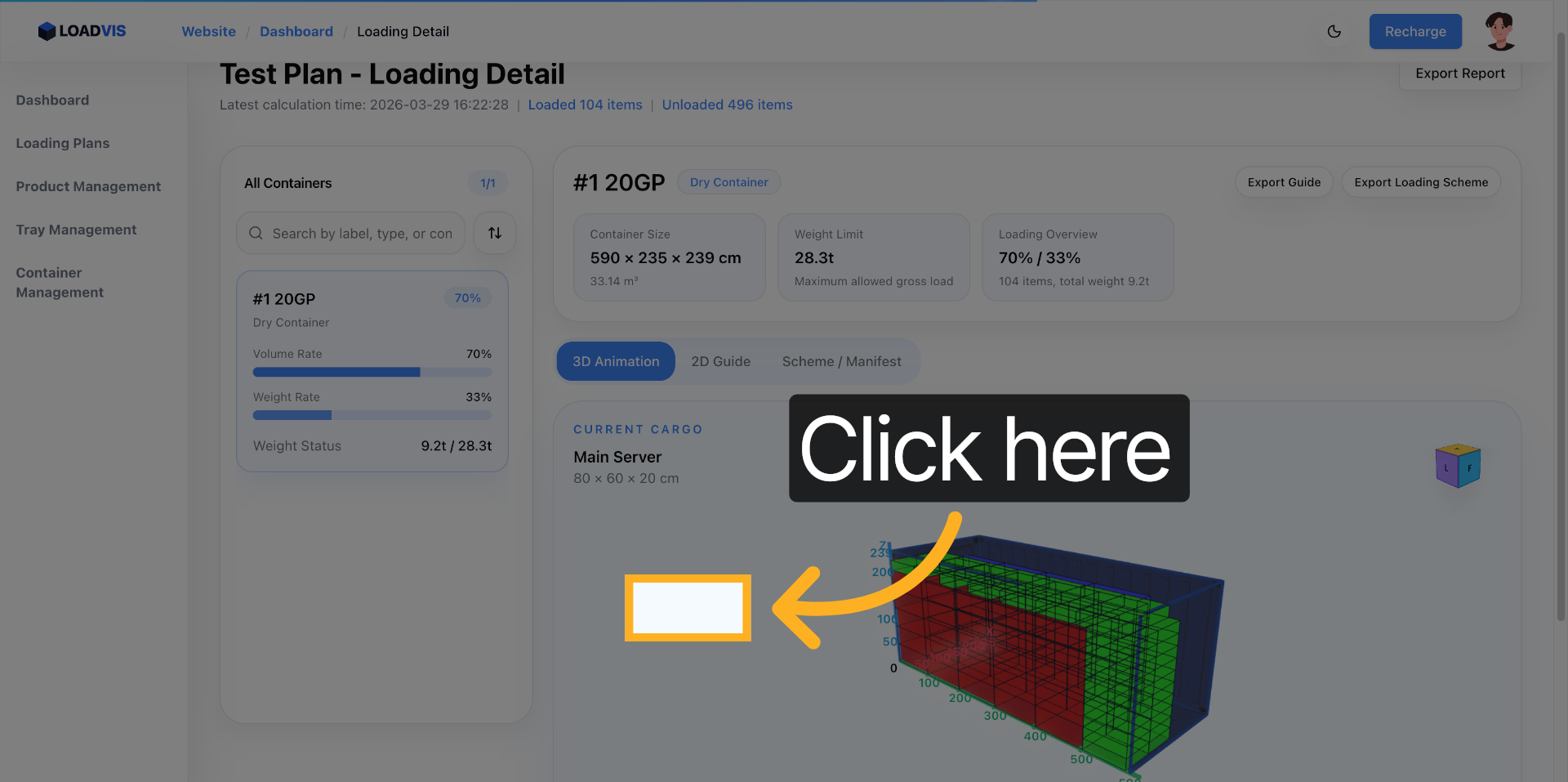
三维装载视图不能当作静态图片来看。必须借助多角度拖拽以及动画播放功能进行全方位校验。切换不同的播放倍速同样是必要的检查手段。这个交互动作的核心目的并不是用来欣赏填满效果有多么壮观。而是要去进行物理堆叠逻辑的验证工作。确认货物摆放方式是否高度契合“后进先出”的卸货动线。并且还要核查叉车操作通道有没有被大型包装彻底遮挡。底部承托层的抗压极限是否足以支撑上层货物的垂直堆叠重量。一旦播放到车厢尾部的卸货模拟。你会发现原本在二维图纸上看起来严丝合缝的排布。在实际动线校验中往往会暴露出极大的干涉隐患。
错误的路径通常是怎样展开的。拿着二维俯视图进行盲目签字放行。直接跳过未装明细的审查。把现场调整的压力全部转嫁给司机或者临时仓管。依靠人力经验去进行倒腾补救。 更稳妥的打法应当是依靠约束前置来规避风险。在建立计划的初期阶段。就把客户交付批次以及目的地卸货顺序直接绑定为分组约束条件。计算动作完成之后。凭借三维视图进行逐层卸货路径的模拟推演。一旦发现动线出现冲突或者出现异常拦截状态。马上把参数拉回编辑面板重新进行复算。绝对不要带着已知缺陷去硬推现场执行。
咱们必须把系统能力的边界划清楚。Loadvis 能够解决的方面主要包括三维几何空间的排布计算工作。能够完成车辆重量与重心分布合规性的校验。并且还能对约束条件冲突进行自动化拦截以及可视化卸货动线的生成输出。 仍然需要人工介入进行复核的环节同样占据很大比重。月台实际存在的限高数值以及车厢门框宽度的物理损耗必须手动测量。现场叉车或者液压地牛的真实回转半径会跟系统预设的理想模型存在明显偏差。临时加急插单所代表的业务优先级变更。外包装材料的实际抗压余量以及现场温湿度剧烈波动带来的瓦楞纸软化风险。这些动态物理变量是纯几何排布算法无法直接感知的。必须依靠一线经验进行最终的兜底判断。
算法所优化的始终是静态的几何空间模型。现场真正跑通的是充满变数的动态物理流程。借助前置约束来定义装载顺序。凭借可视化手段来校验堆叠逻辑。这是让装载方案从纸面可行过渡到现场可执行所必须跨越的基础门槛。