計画容積率100%の罠:現場実行不能な積載計画が生まれる境界線と検証フロー
容積計算のシート上では「100%充填」が輝いて見える。だが、ドックの床に降り立った瞬間、その数字は脆くも崩れ去る。フォークリフトの旋回半径が足りない。ドア開口部に外装が引っかかる。重量偏りが台車バランスを崩す。なぜ、数学的に整列した解が現場で機能不全に陥るのか。パッキングソルバーが吐き出す最適値は、静止空間の幾何学整合性に過ぎない。動的な荷役プロセスを無視すれば、その解は実行不能な幻想である。
次元の分離が最初の罠となる。体積(m³)と重量(kg)は別系統で管理されがちだ。三次元空間の「入口断面積」と「重心位置の許容偏差」は独立変数ではない。これらが同期しない限り、計算結果は現実を写さない。システムが「積載済み/未積載」の統計だけを返す時、担当者はその数字をそのまま承認印として押す。物理的干渉や作業順序の検証は、デフォルトで切り捨てられる。境界条件の欠如が決定打だ。実測内寸とシステム登録値に±50mmの乖離があれば、アルゴリズムの出力は即座に破綻する。作業空間(クリアランス)が0のままなら、現場は必ず摩擦に直面する。
検証フローの実践:計算結果を現場へ降ろすまでの工程
計算結果を現場実行可能な計画へ昇華させるには、検証フローの制度化が不可欠だ。計画の命名から詳細検証までの工程を追う。静的な配置図を信用するな。プロセスを走らせろ。
Phase 1: 初期構成とパラメータ同期 (Create & Edit)
計画の生成は単なるファイル作成ではない。バッチ単位のトレーサビリティを担保し、後の照合における基準点を定義する行為だ。
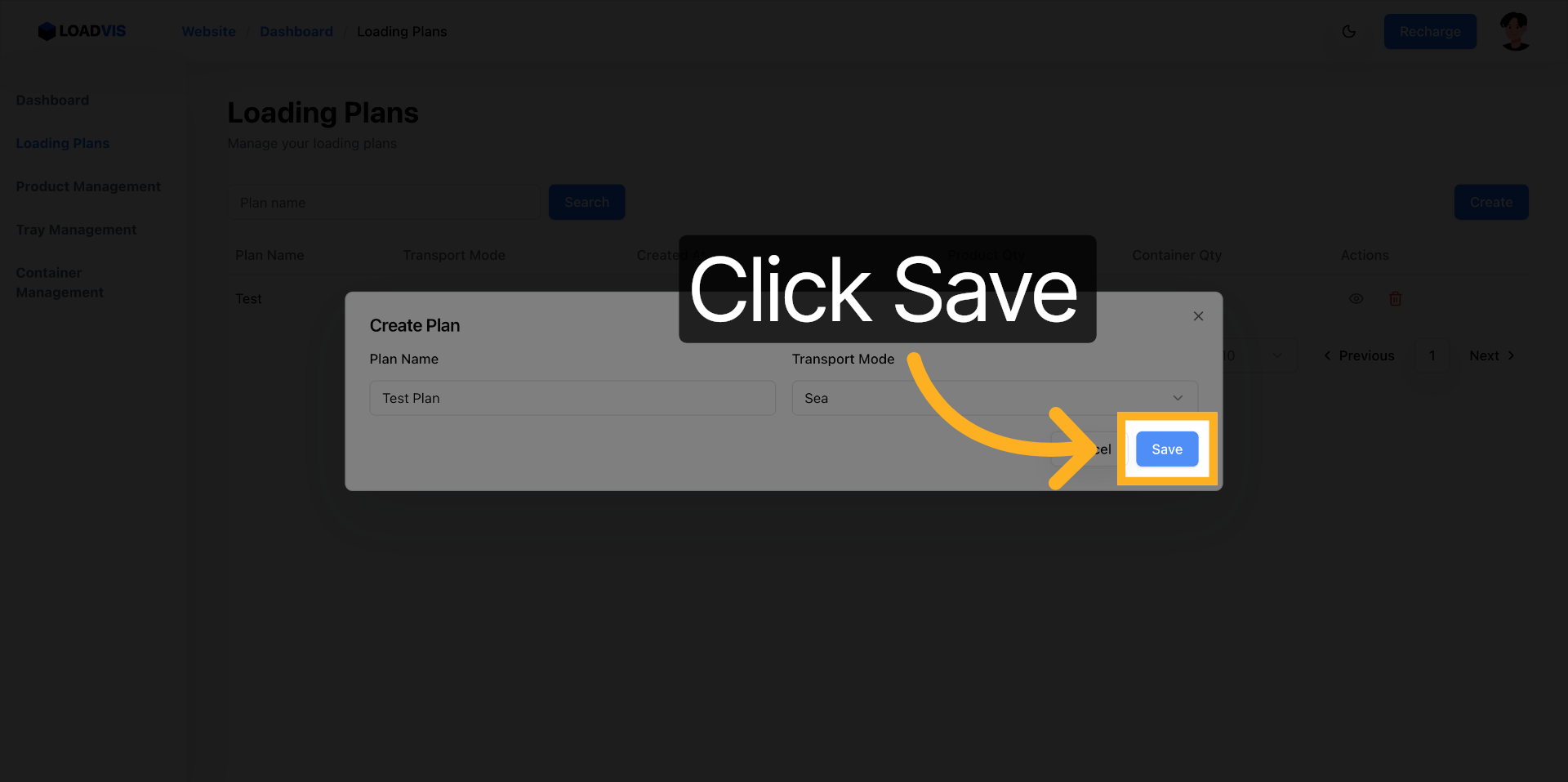
新規計画の初期化と命名 作成ボタンをクリックし、標準化された命名規則でバッチの目的や出荷先を明示する。ラベル付けを怠ると、後の結果追跡で必ず混乱する。計画名を設定したら、即座に保存する。永続化された瞬間、そのバッチのトレース起点が固定される。
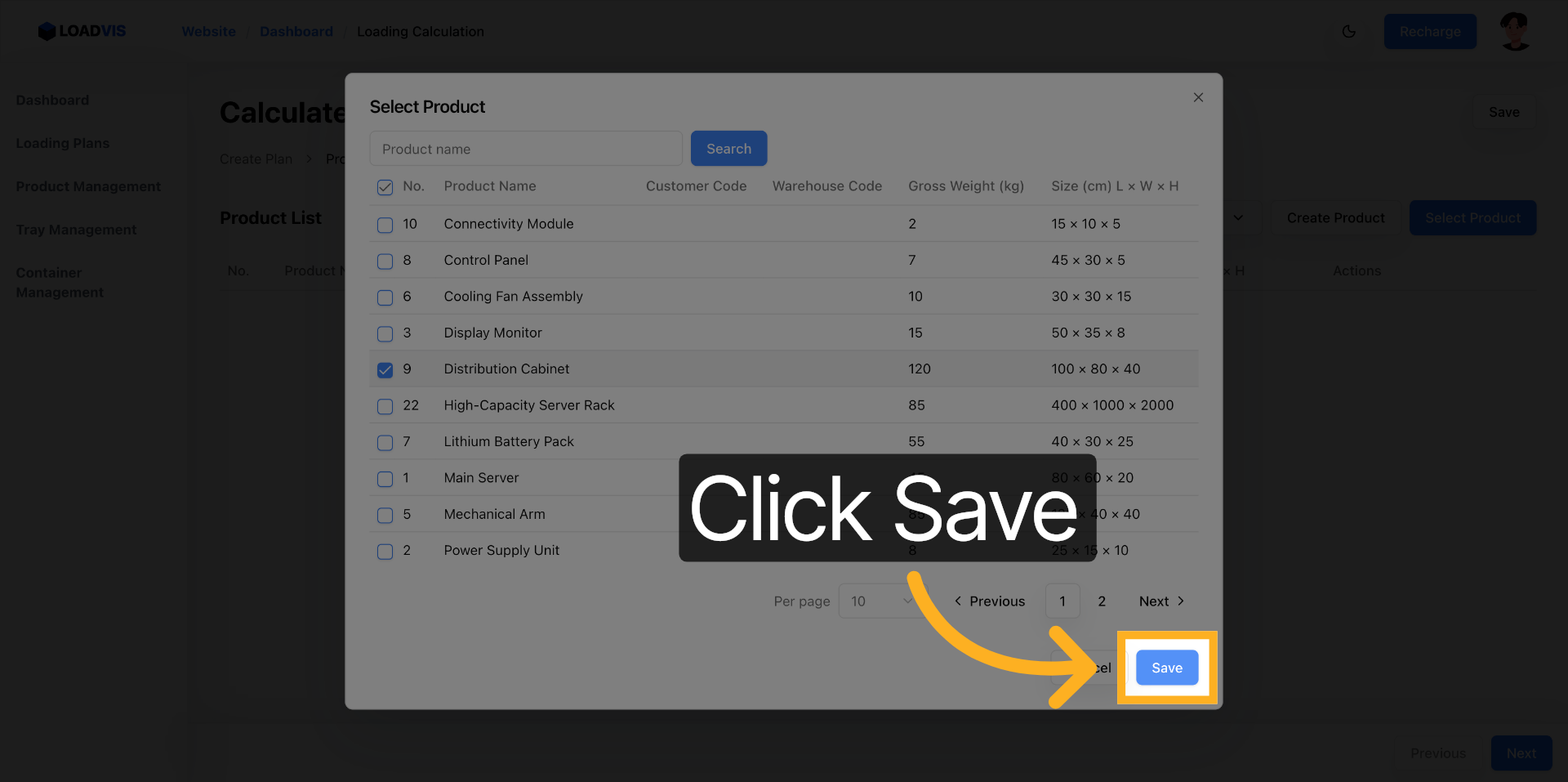
SKUマッピングと数量同期 「製品を選択」で対象SKUをマッピングし、正確な数量を投入する。ここが肝心だ。製品仕様と容器パラメータの同期が必須となる。コンテナ選択時に「ドア寸法」「許容重量」「重心偏差閾値」をマスターデータの実測値で登録していない場合、アルゴリズムは誤った空間認識で計算を進める。複数製品の一括インポート後、数量フィールドを個別に編集し確定する。
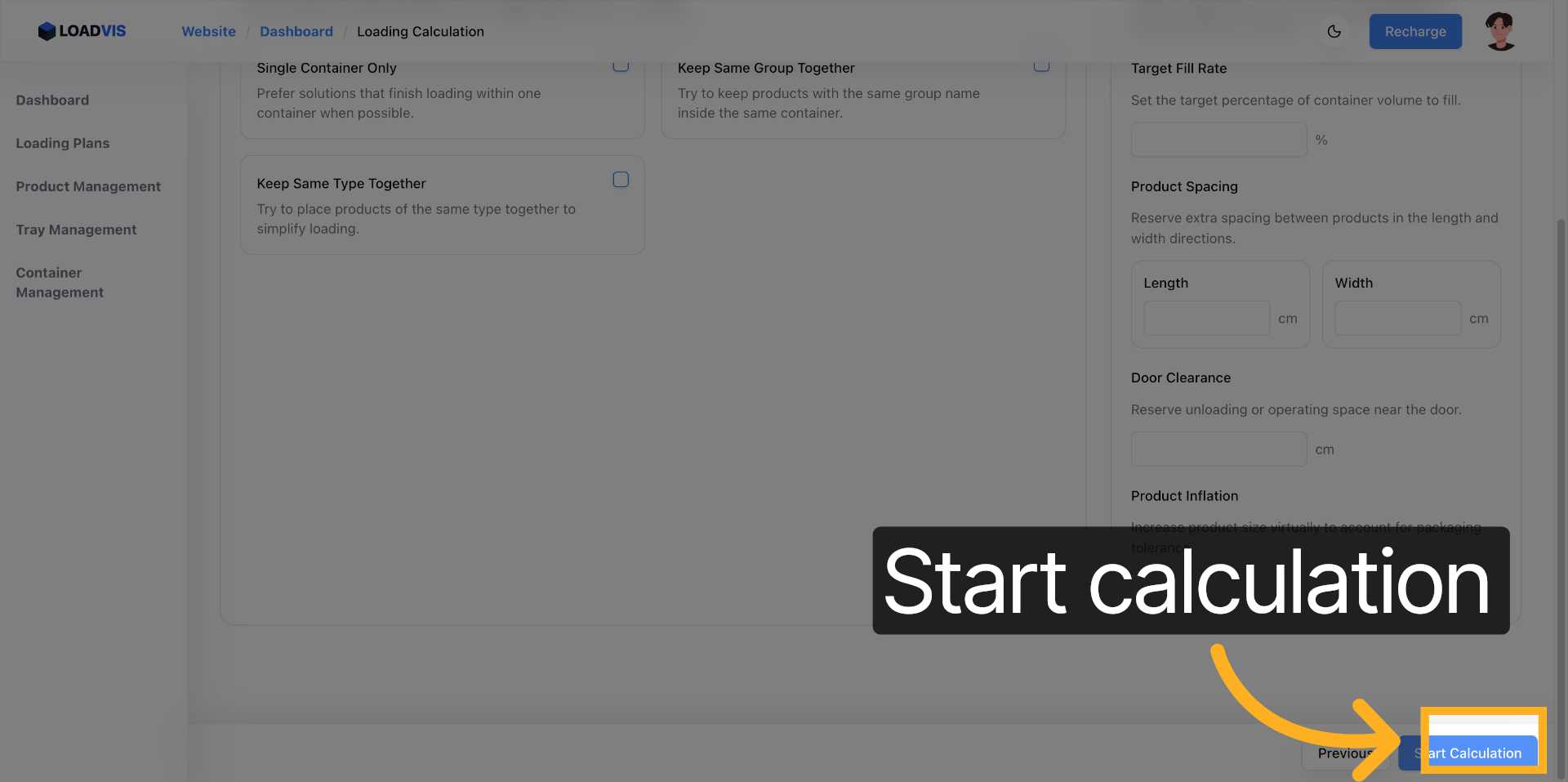
計算トリガーの実行 製品データを固定したら「次へ」でコンテナ設定へ移行する。適切な容器タイプを選択し、確定。「計算開始」をクリックする。システムは設定済み仕様と制約条件を元に、インテリジェントな積載最適化を走らせる。完了ダイアログが出たら、安易に進むな。ソルバーの出力は生データである。検証が待っている。
Phase 2: 統計照合と空間検証 (Detail)
詳細ビューが開いた瞬間、分析が始まる。数字の羅列を無視するな。異常値はメッセージを内包している。
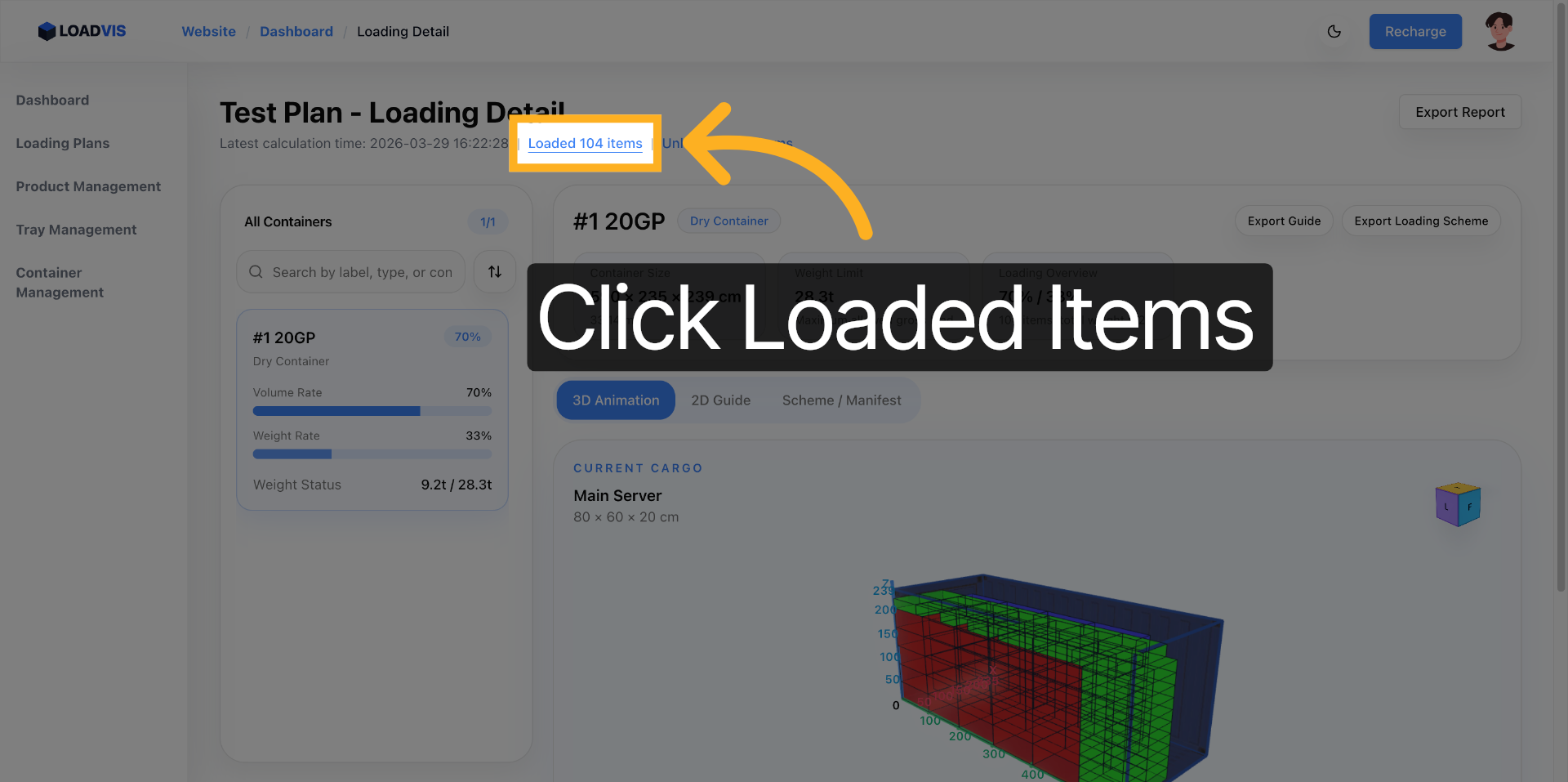
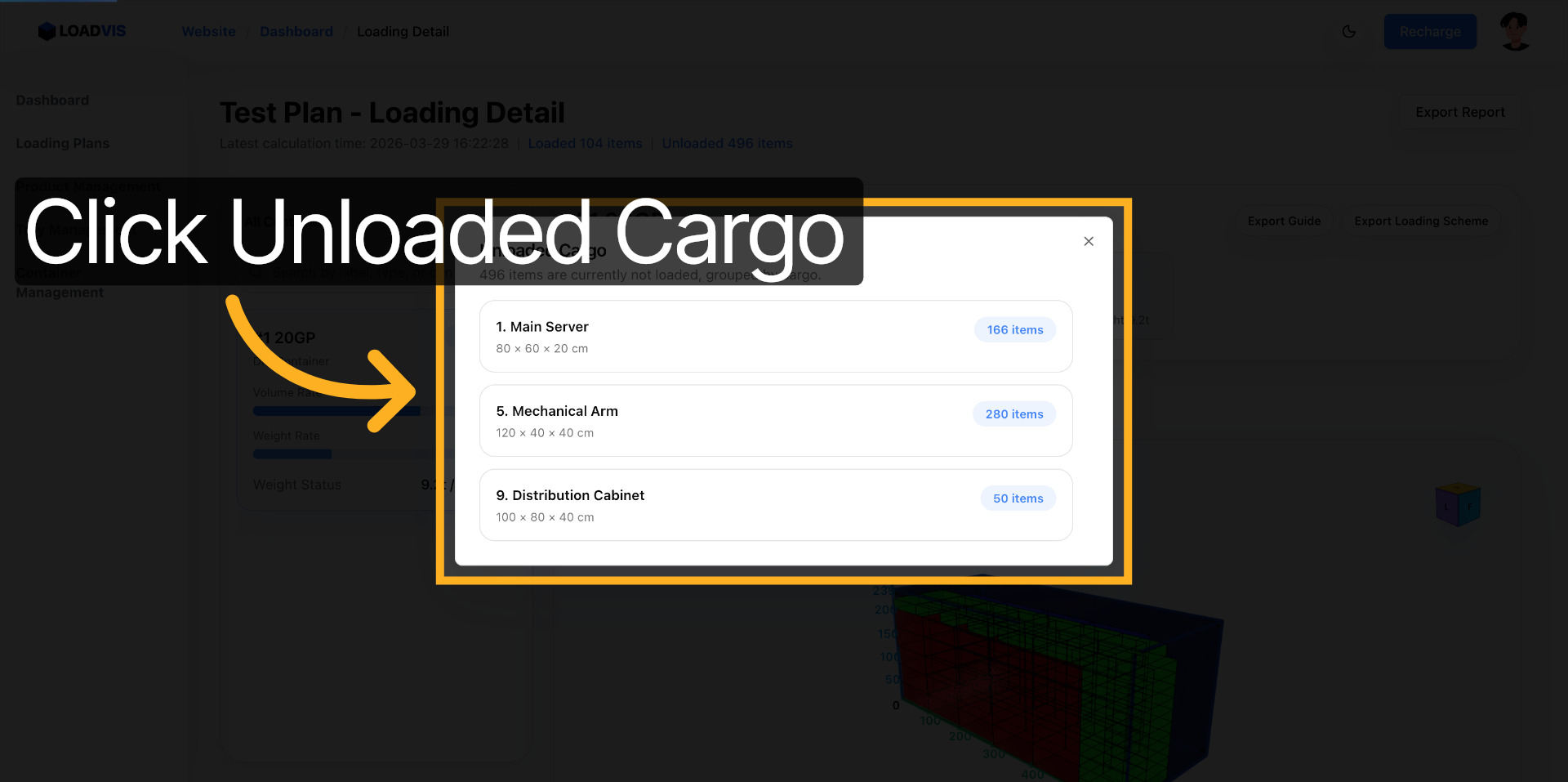
積載/未積載マニフェストの対比 「積載済み 104 件」を展開し、正常に収容された貨物の完全な明細を確認する。閉じて、次に「未積載 496 件」をクリックする。ここがボトルネックの発生源だ。未積載貨物のリストとグループ化情報を開き、残存数量を確認する。発生理由は何か。容積上限か、重量オーバーか、寸法干渉か。物理的要因を明細レベルで特定しない限り、計画の修正は場当たり的になる。
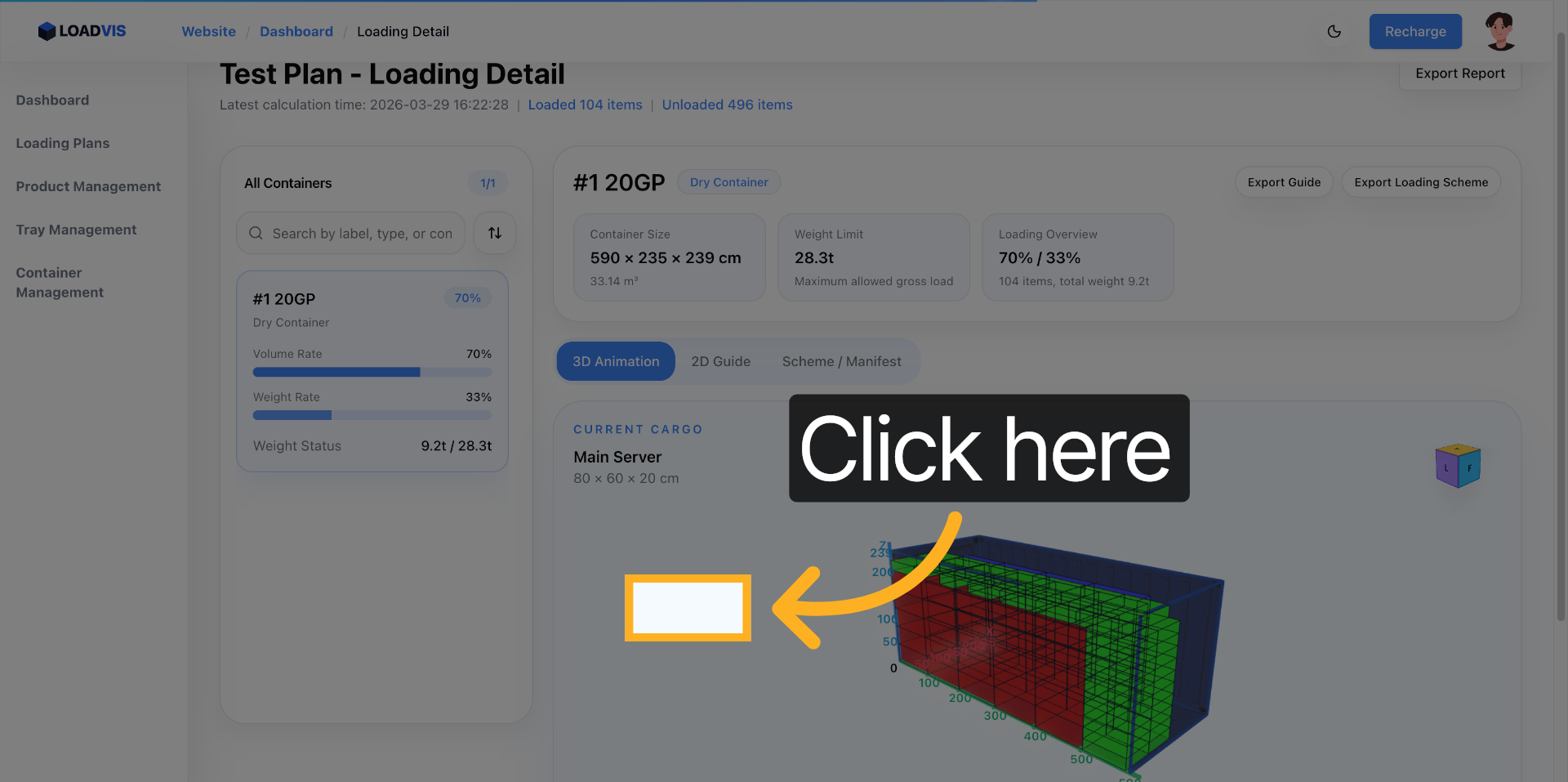
3D空間の多角的検証 統計の照合が終われば、空間検証へ移行する。3Dビューエリアをドラッグし、コンテナ内の貨物分布を複数の角度から叩く。静止図では死角になる領域が浮き彫りになる。
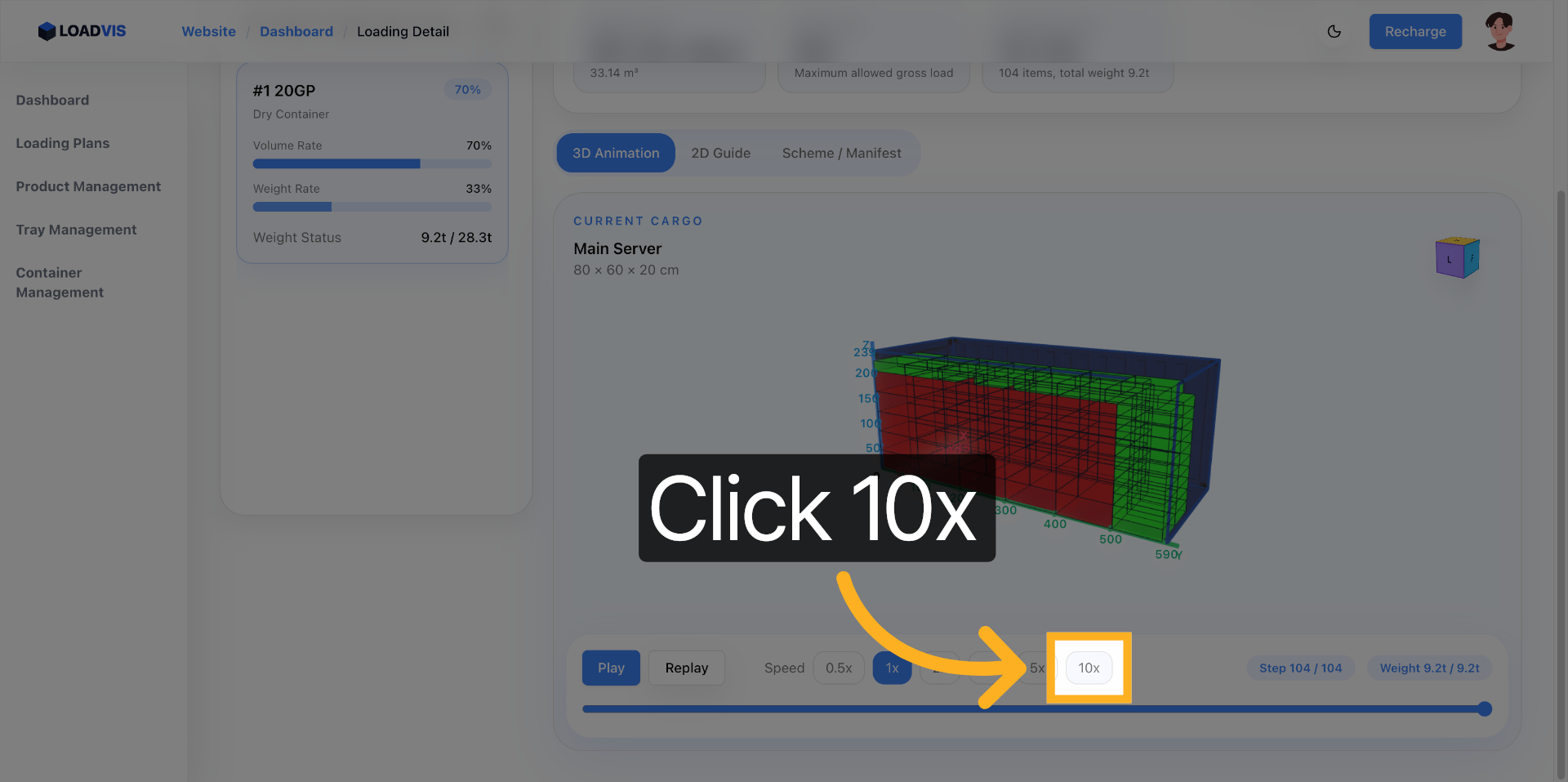
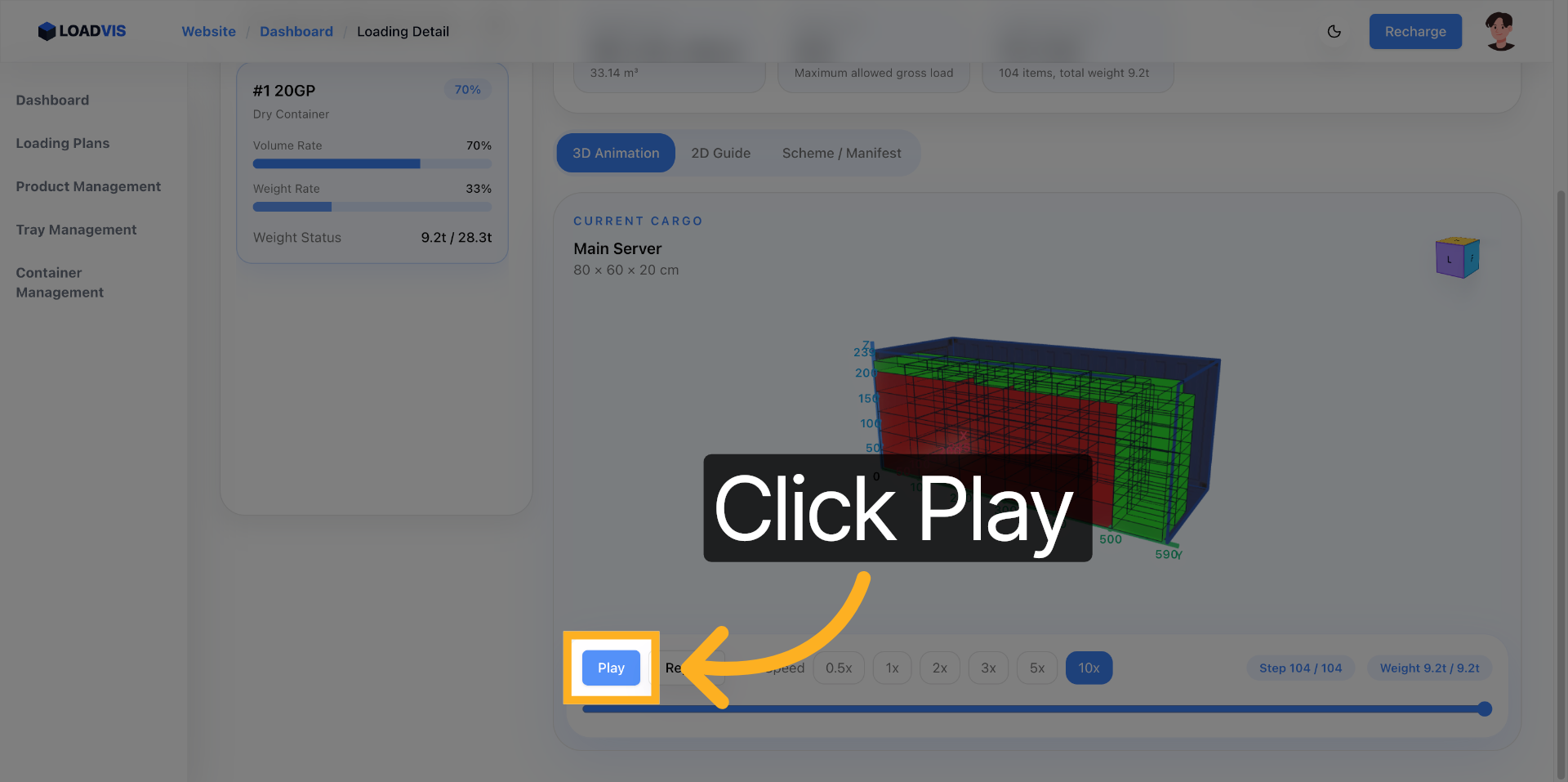
積載順序のアニメーション追跡 「×10」ボタンで再生速度を切り替え、「再生」を開始する。貨物がコンテナに積み込まれる段階的なプロセスを時系列で追う。なぜ順序が命か。現場のフォークリフトが最後に置いた荷物を最初に下ろす際、その経路に障害物があれば計画は破綻するからだ。再生中もビューを操作し、任意の方向から積み込みシーケンスとスペース利用率を検査する。
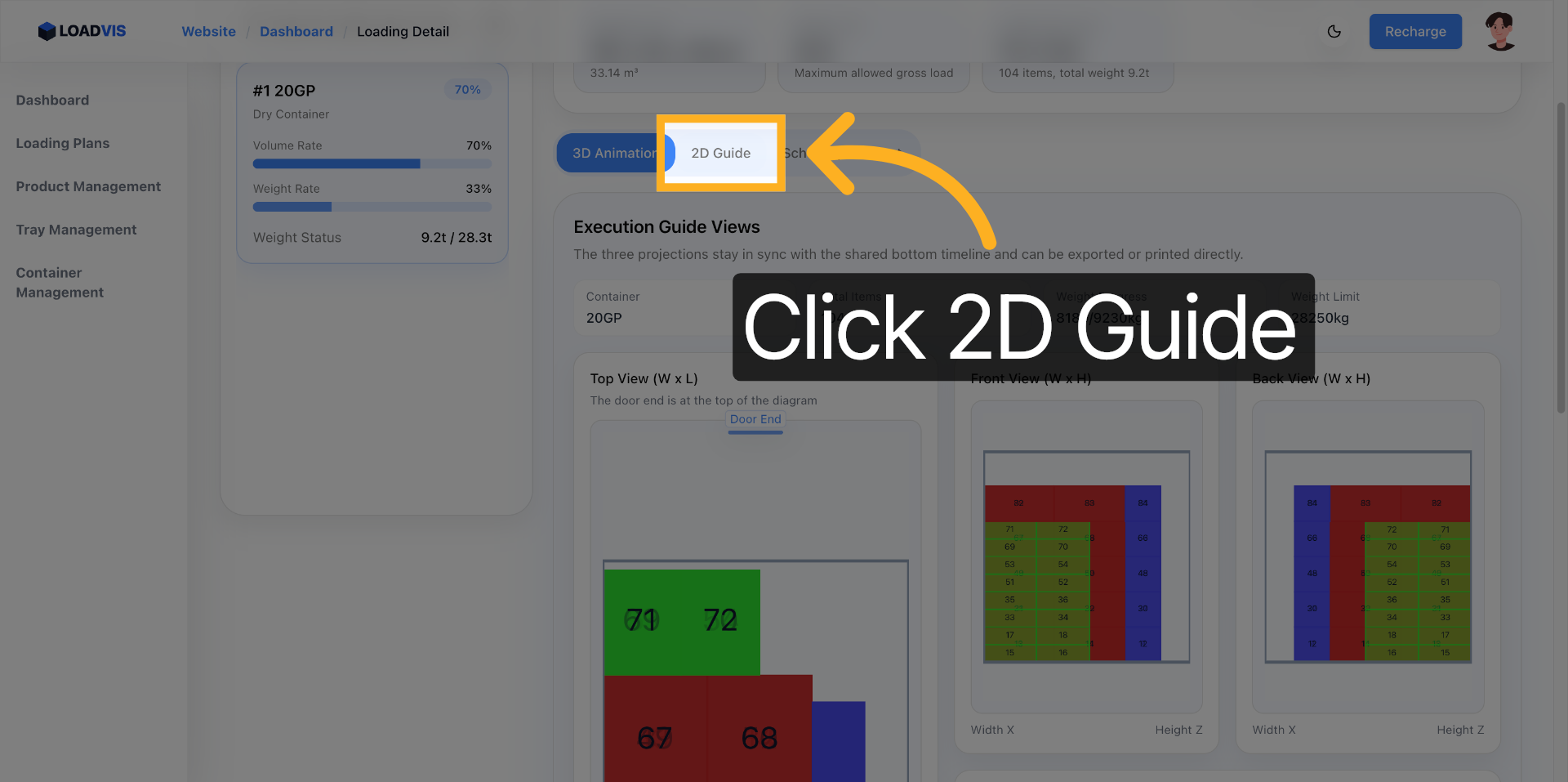
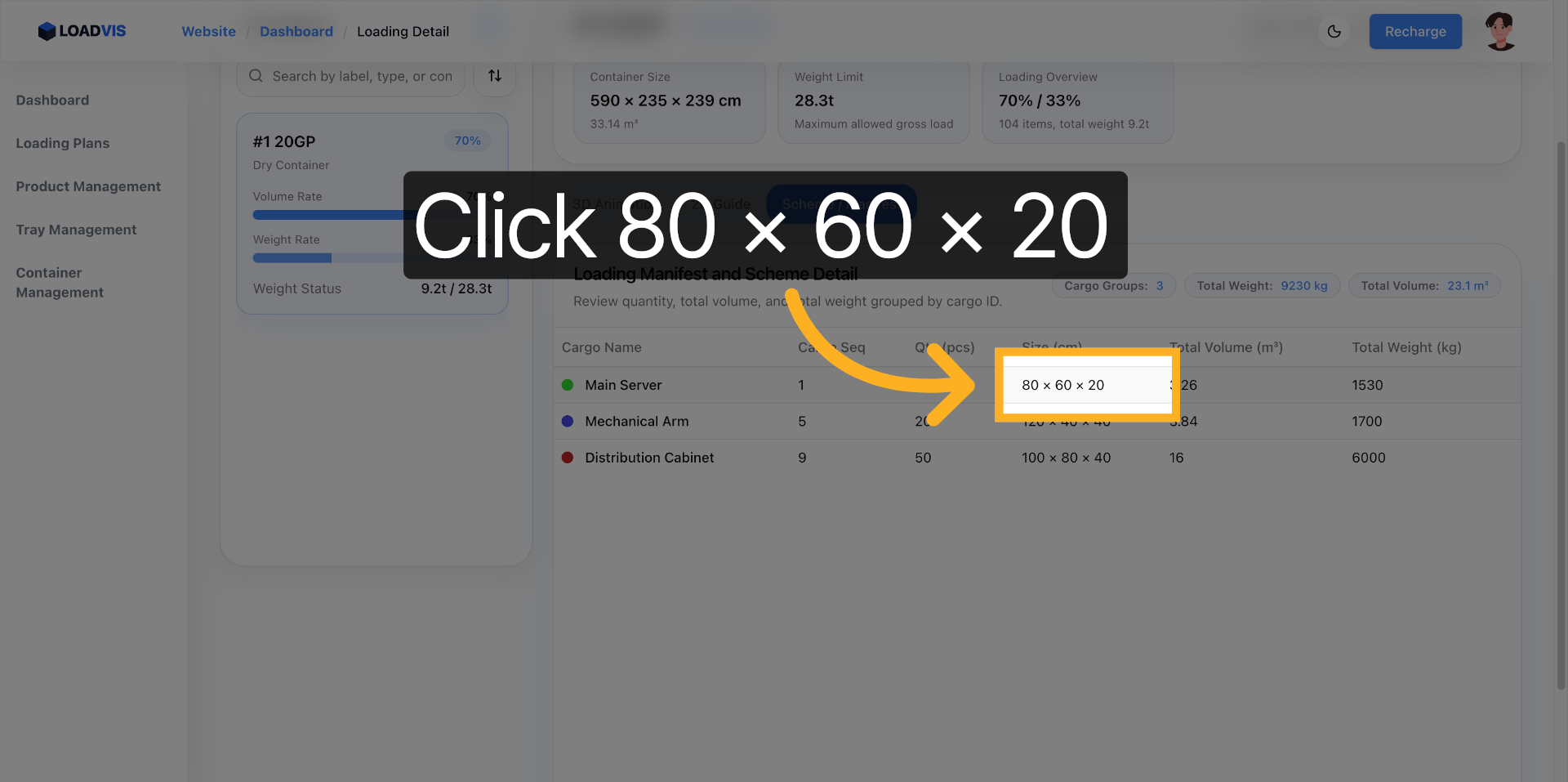
2Dガイドによるクロスチェック 「2D ガイド」に切り替え、上面図と側面図を交差確認する。3Dの視覚情報に惑わされず、平面視点で貨物のレイアウト検証を支援する。ここで作業スペースの有無と重心の前後・左右偏りが可視化される。「スキーム / マニフェスト」を開き、個々の長さ・幅・高さ・単位重量・総体積がシステム登録と一致しているかを最終照合する。
ツールの有効範囲と手動検証の境界線
ソフトウェアはどこまで信じ、どこで手を止めるべきか。
ツールは明確に有効だ。複数SKUの組み合わせ爆発を処理し、制約条件に基づく干渉自動検知を実行し、積載順序をアルゴリズム生成する。人間の直感や手計算では処理不可能な計算量を瞬時に解決し、客観的な検証データを提供する。これこそがシステム導入の本来の価値である。
だが、手動確認が必須な領域が必ず残る。倉庫の実環境における荷役機器の旋回半径やリフト高さ制限は、システムが自動取得できない。貨物の包装厚みのばらつき、パレットの規格差異、積載時の微細な変形も同様だ。さらに、現場の人員配置や緊急時の荷下ろし優先順位の切り替えは、動的な変数である。ツールは「数学的に実行可能か」を判定する。物理的・運用的に安全かつ効率的かの最終判断は、現場知見と実測による手動検証に委ねられる。
境界条件は厳格である。システムの許容誤差が実際の作業許容誤差を上回る場合に、必ず手動による現場適合性の確認プロセスを挟む。計算結果の数値だけを信じるな。実寸で測れ。干渉領域が確認された場合は、計画を破棄し、制約パラメータまたは貨物構成を最初から見直す必要がある。再計算による微調整は、根本的な構成エラーに対して無力であることが多い。
結び
計画は計算で完了しない。検証で確定する。
理論と現場のギャップを埋める唯一の橋は、アルゴリズムの盲信ではなく、3D/2D可視化とマニフェスト照合を必須のチェックポイントとして運用に組み込むことだ。重量偏りが許容範囲外の場合、またはドア開口面積に対して最小単位貨物が通過不可と判定された場合、その計画は現場へ投下してはならない。実行不能な積載計画が生まれる境界線は、ソルバーの性能ではなく、制約条件の精度と検証プロセスの網羅性にある。ドックで摩擦を起こす前に、画面の中で干渉を潰せ。それが設計と運用を跨ぐ技術者の責務だ。