为什么90%的装箱率会在月台卡壳:从“算得满”到“装得进”的校验逻辑
算法吐出的方案,容积率92%。 很漂亮。 但卡车停在月台,现场调度对着图纸发愣。叉车进不去。最深处那个托盘直接被门框干涉。硬推?底层瓦楞纸瞬间爆开。延误两小时。客户发起索赔。计划员在通讯软件里甩出一句“明明系统说空间够啊”。 断裂带就这样产生了。 这就是理论装载率与物理执行效能之间的典型错位。我们习惯死死盯着那个冷冰冰的百分比。体积利用率压线了。重量分配曲线平滑了。于是签字下发执行指令。可现实作业从来不是三维建模软件里那种干净的布尔运算。叉车转弯半径会直接吞掉理论计算出的净宽。逐层堆码时的重心微小偏移,足够在运输途中触发车桥限重传感器的报警阈值。包装纸箱受压后的蠕变形变累积,会硬生生挤没预留的毫米级操作缝隙。现场被迫执行返工流程。拆箱。重装。工时成本就这么被静默烧尽。
为什么这种风险常被严重低估? 认知惯性在持续施加阻力。 大量从业者默认“数学上放得进”就无条件等价于“物理上装得下”。这种等号建立得过于草率。计划人员往往陷入对体积与重量利用率指标的过度依赖,习惯性地执行忽略动线拓扑与重力传递逻辑的盲视行为。月台装卸从来不是在真空环境里完成的几何拼图。叉车驾驶员的操作轨迹带有不可控的毛边。人工容错率低得令人不安。当最外层的轻质货载必须依靠内层重型单元提供侧向支撑时,进出序列一旦形成拓扑死锁,再高的空间密度也只是停留在显示器上的纸面富贵。你排布得再紧凑,也挡不住一次路面颠簸引发的多米诺骨牌效应。
得把校验动作强制前置到下发环节之前。
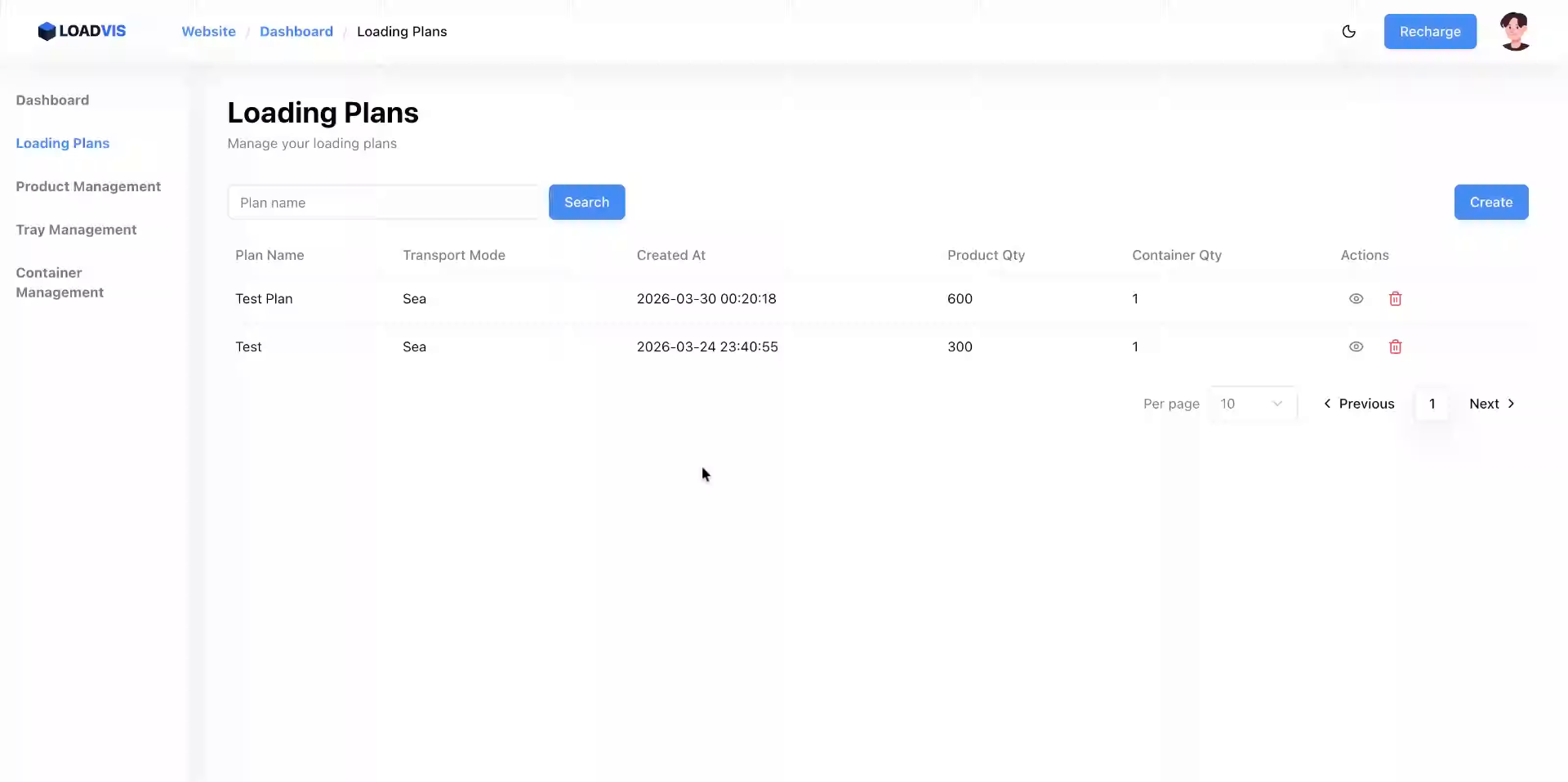
不是看一眼汇总数字就结束。我们需要执行多维视图之间的交叉穿透验证流程。进入 Loadvis 的计算结果详情页之后,别急着导出图纸。先执行对未装载明细面板的逐一展开与归因审查操作。这一步的核心目的根本不是清点数量。而是为了精准定位触发硬性拦截约束的具体SKU集合及其背后的拦截逻辑参数。哪些货载是因为触及单层承重阈值而被算法强制剔除的?哪些是因为触发了最大堆叠层数限制而被挂起的?把拦截原因剥离清楚,你才能准确判断求解器到底在规避哪类结构性风险。
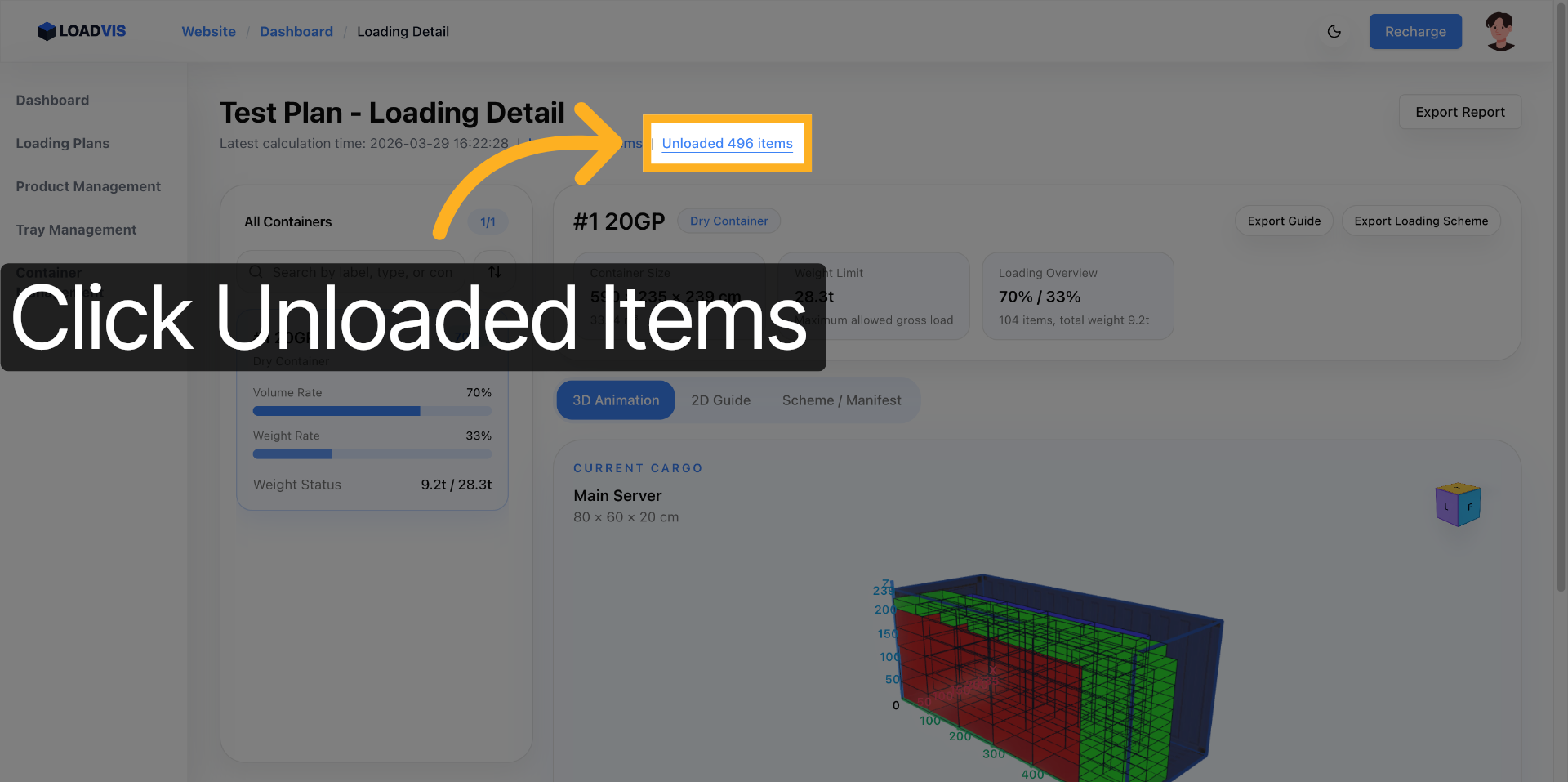
接着去拖拽那个三维交互视口。 启动针对三维装载动态轨迹的时序回放程序。 不要保持默认倍速观看。直接把播放速率切换至10倍速档。观察货物滑入集装箱内部的完整进出时序。动态序列回放的工程价值在于暴露动线层面的物理冲突。当底层重型托盘过早落位封死叉齿路径,而上层货物仍需向内推进时,你会直观地看到序列执行层面的死锁特征。求解引擎其实在后台已经完成了路径干涉判定。只是多数操作者平时懒得执行这一步的深度审查。
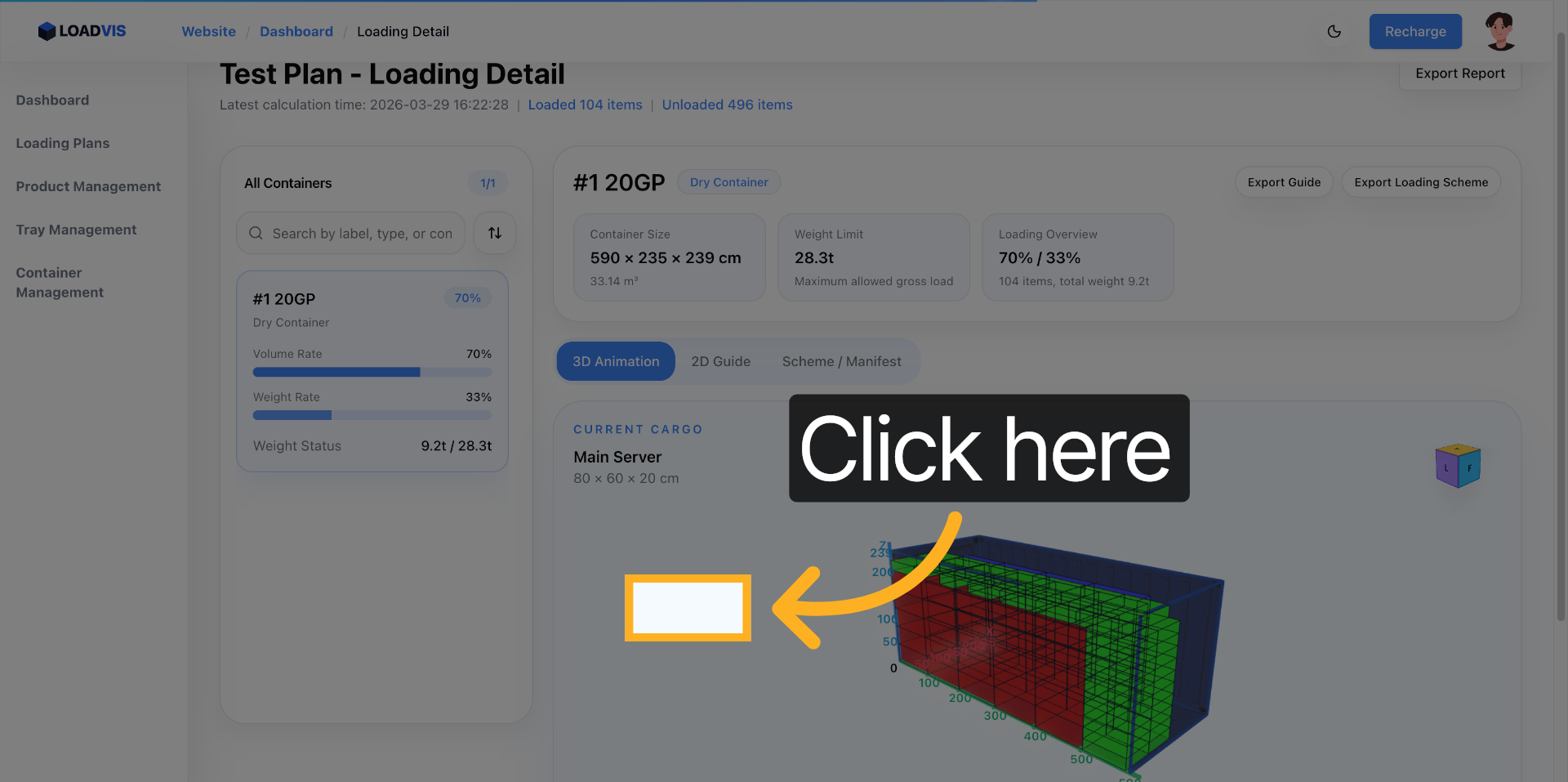
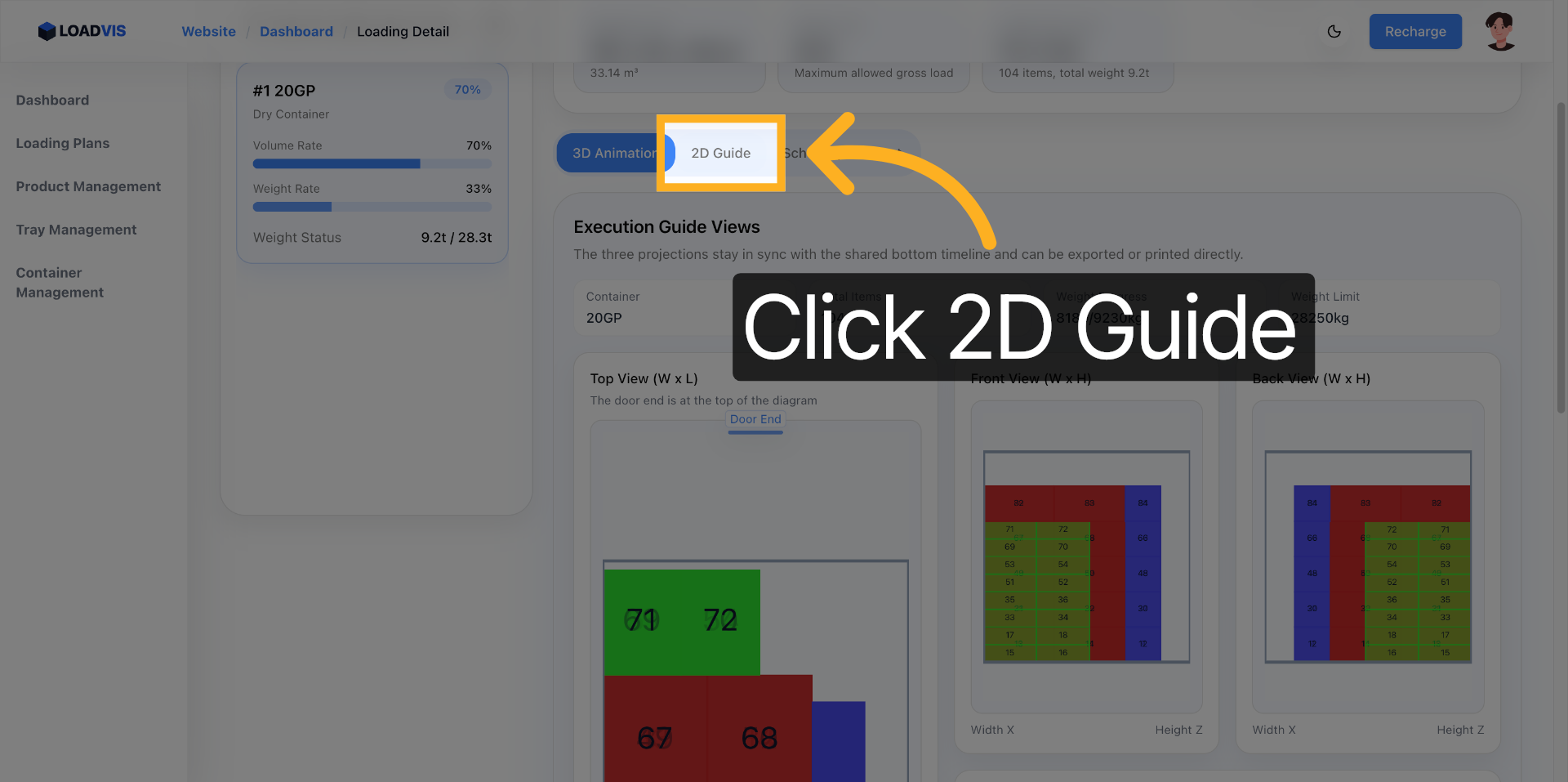
把观测视角强制切换至二维导视界面。 获取平面投影。执行俯视与侧视视图的交替比对动作。二维导视功能的引入,本质上是为了开展对堆码层级阶梯分布与作业通道净宽的系统性核对。三维透视关系极其容易产生视觉欺骗,纵向深度信息会掩盖横向的空间干涉。二维正交投影能强制你的视线逐层扫描每一排货列之间,到底是否保留了足够一个标准手动液压车自由穿梭的物理余量。
最后去翻阅 Manifest 载重明细表。这不是走形式的归档步骤。你需要执行单层承重分布数据与挂车总轴荷极限的逐项比对审查。确认重心坐标分布曲线是否严格落在底盘悬挂的设计安全包络线之内。别等车辆在高速公路上被路政稽查站拦下,超重罚单会直接抹平整趟运输的毛利空间。
两条执行路径摆在面前。 差异极其明显。 错误的路径通常非常直接。计划人员拿着静态的平面排布图,顶着接近极限的高装载率指标直接执行仓库指令下发。完全依赖现场作业人员的经验进行暴力填塞,或者在遭遇空间冲突时再临时启动拆包降级处理流程。这种操作模式本质上是在进行高风险概率博弈。赌叉车操作精度足够稳定。赌外包装抗压强度达标。赌驾驶员保持沉默。博弈失败的代价是整单交付周期断裂。
可靠的路径必须包含多轮次的前置校验循环。求解器完成运算之后,优先调取未装载清单面板,将被拦截的货载类型与执行拦截的具体规则逻辑提取成结构化报表。随后以高倍速反复拖拽播放条,验证三维序列进出动线是否具备实际可操作性。紧接着调用二维辅助导视界面,逐层核对阶梯堆叠形态是否符合重力向下传递的物理原则。确认重量分布矩阵完全贴合车轴载荷红线之后,再决定是否推进到定稿阶段。如果发现重心横向偏移量超标,或者某类长条型SKU被批量拦截,直接退回参数配置层。手动执行对货物分组规则的重新划定。调高包装膨胀系数容差。重新触发空间求解进程。别抱怨流程繁琐。这一步多消耗的十五分钟审查成本,绝对低于月台停机待命产生的违约赔偿金。
求解工具的能力边界在哪里? 它负责在严格限定的数学边界内部,持续执行空间拓扑排样求解与装载序列的动态模拟演算。外形尺寸数据。车门洞净空限制。车辆总重红线。重心偏移容差阈值。堆叠层级限制。货件预留间距。算法会严格基于这些刚性格栅参数进行组合优化运算,自动拦截越限项目并输出对应的导视矩阵。算力表现确实强悍。但它无法完全覆盖所有非结构化环境变量。 它计算不出纸箱吸潮后的结构强度衰减梯度。模拟不出月台环氧地坪摩擦系数骤降导致的货物滑移风险。也无法映射新手叉车驾驶员微操变形带来的侧向挤压干涉。这些都属于动态物理噪声。必须引入人工确认节点进行兜底。 地磅的计量误差容差阈值,你得手动划定安全缓冲带。通常建议预留1.5%至2.5%的重量浮动区间。现场装卸窗口的排队拥堵指数,得结合车队调度历史数据进行经验性预判。遇到重型机械设备或带轮异形件,加固绑带的受力锚点方案,系统仅提供理论投影坐标,实际紧固工艺必须由现场安全员进行实地复核签字。 别指望单点系统能包揽所有落地变量。
高空间利用率从来不是交付的终点。 能在实际动线中安全落地,才算闭环。 计算引擎输出的排布图谱,仅仅是一张静态的快照。执行层面的物理可行性,必须依靠动态序列回放、拦截清单归因、二维正交导视与载重明细表的逐层穿透来交叉验证。把多维校验节点强制嵌入计划下发前的最后一道控制闸。清醒认知算法算力的刚性边界。保留人工复核的弹性决策空间。系统负责执行空间求解。人负责承担落地兜底。月台的执行流程,自然会顺畅流转。