積載率100%が現場で機能しない理由:入口制約と重量配分の検証シナリオ
総体積がコンテナの内部容積に綺麗に収まる。アルゴリズムが弾く数値は99.8%。一見すると完璧だ。しかしフォークリフトがドア開口部へ進入した瞬間、計画は物理的に破綻する。天板と最上段パレットが干渉する。軸重が極端に偏る。積載は中断する。体積最適化をそのまま物理実行性とイコールで結ぶ錯誤。これが現場で頻発する停滞の根本だ。なぜ計算上の適合性と現場実行性はこれほど乖離するのか。理由は単純である。静的な表計算シートが扱うデータは、時間軸を切り捨てた断面図に過ぎないからである。「積載順序」「時間経過に伴う重心移動」「フォークリフトが旋回する際に必要とする最小半径」。これらの動的制約を無視し、単に長×幅×高の総和だけを追いかけると、計画は机上の空論へ堕する。楽観主義は必ず摩擦係数を高める。
境界条件を数値で固定せよ。ドア内寸(高さ/幅)< 積載物高さ+ハンドリング余裕。軸重偏差>設計最大許容値の5%。未積載率>3%。これらを無視する心理的バイアスが蔓延している。体積率が高ければ現場もどうにかなるという幻想だ。計画段階でこの閾値を設定しない限り、アルゴリズムの出力は単なる推論に終わる。検証ゲートを構築する必要がある。
edit ワークフローのステップ25〜27。コンテナを選択する局面だ。ここでドア内寸と耐荷重を定義することが、物理的搬入可否の一次フィルタとなる。
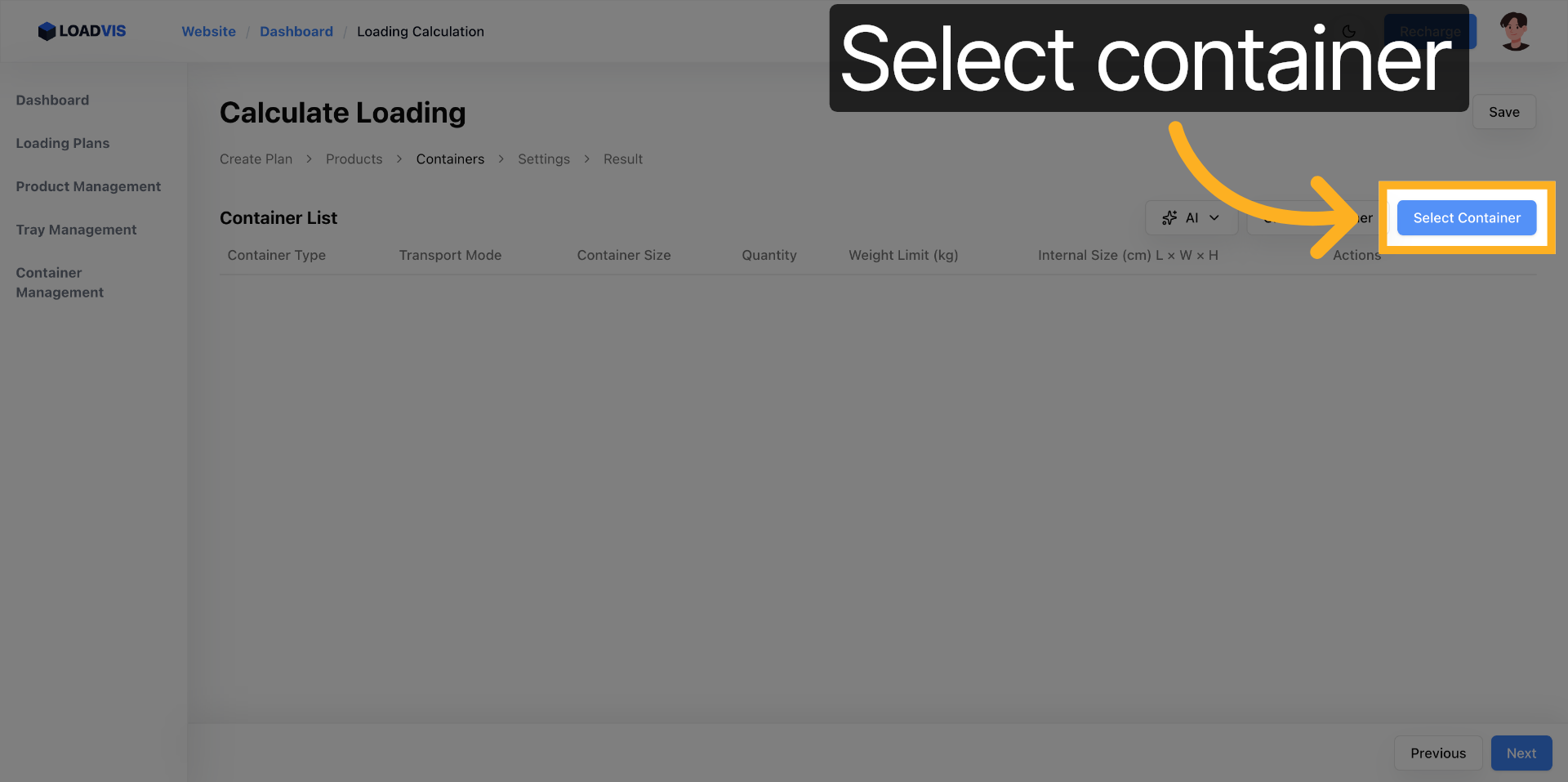
システムが数値の整合性を自動でチェックするのではない。オペレータが意図してハードリミットを注入しなければならない。閾値を外すな。選択したエントリを確定し、計算確認へ進む。制約を後から修正するコストは指数関数的に跳ね上がる。次に結果画面へ移行する。
detail ステップ4とステップ6。積載済み貨物のサマリーと、未積載貨物のサマリー。この二つのパネルを対比せよ。
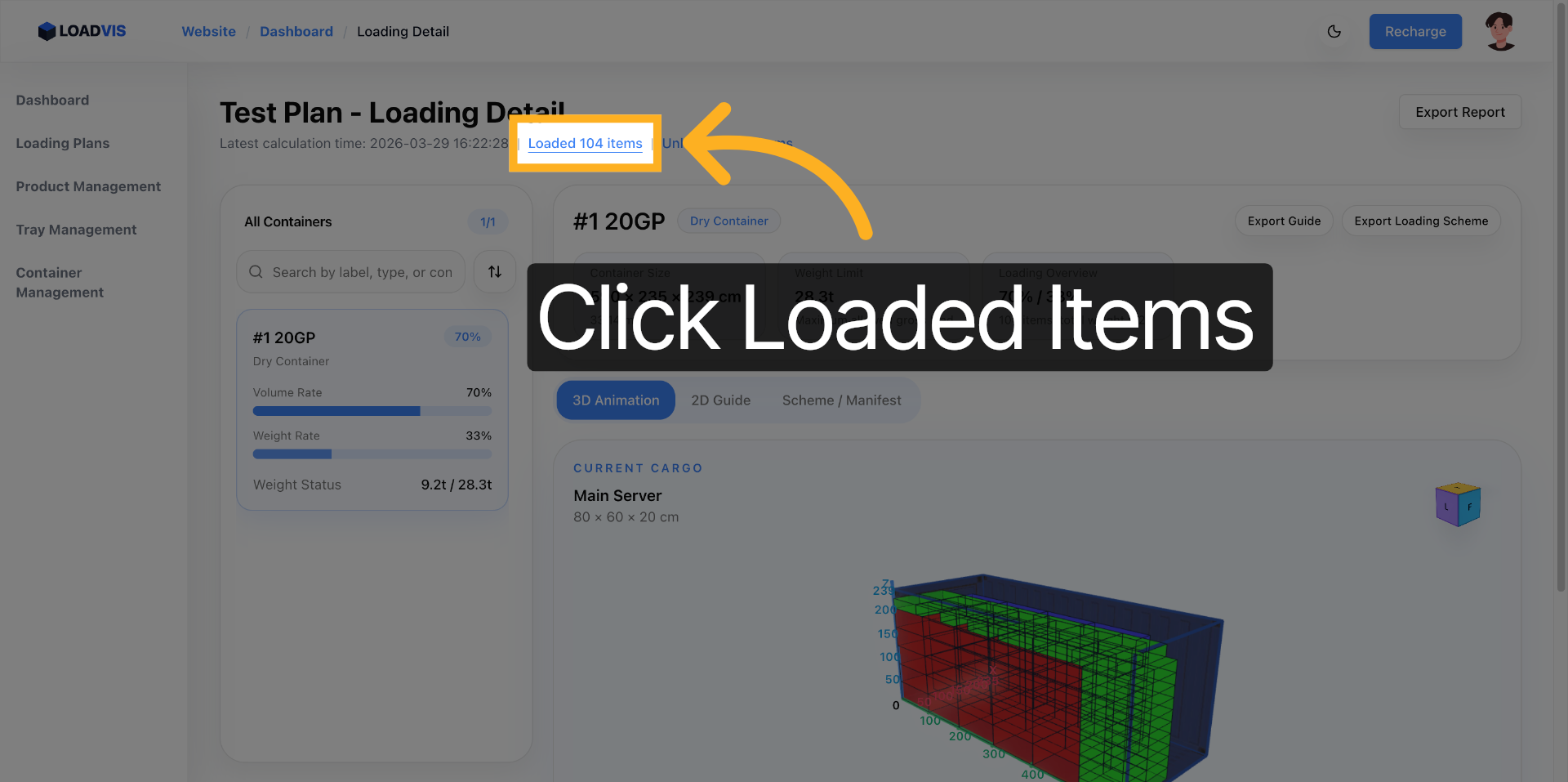
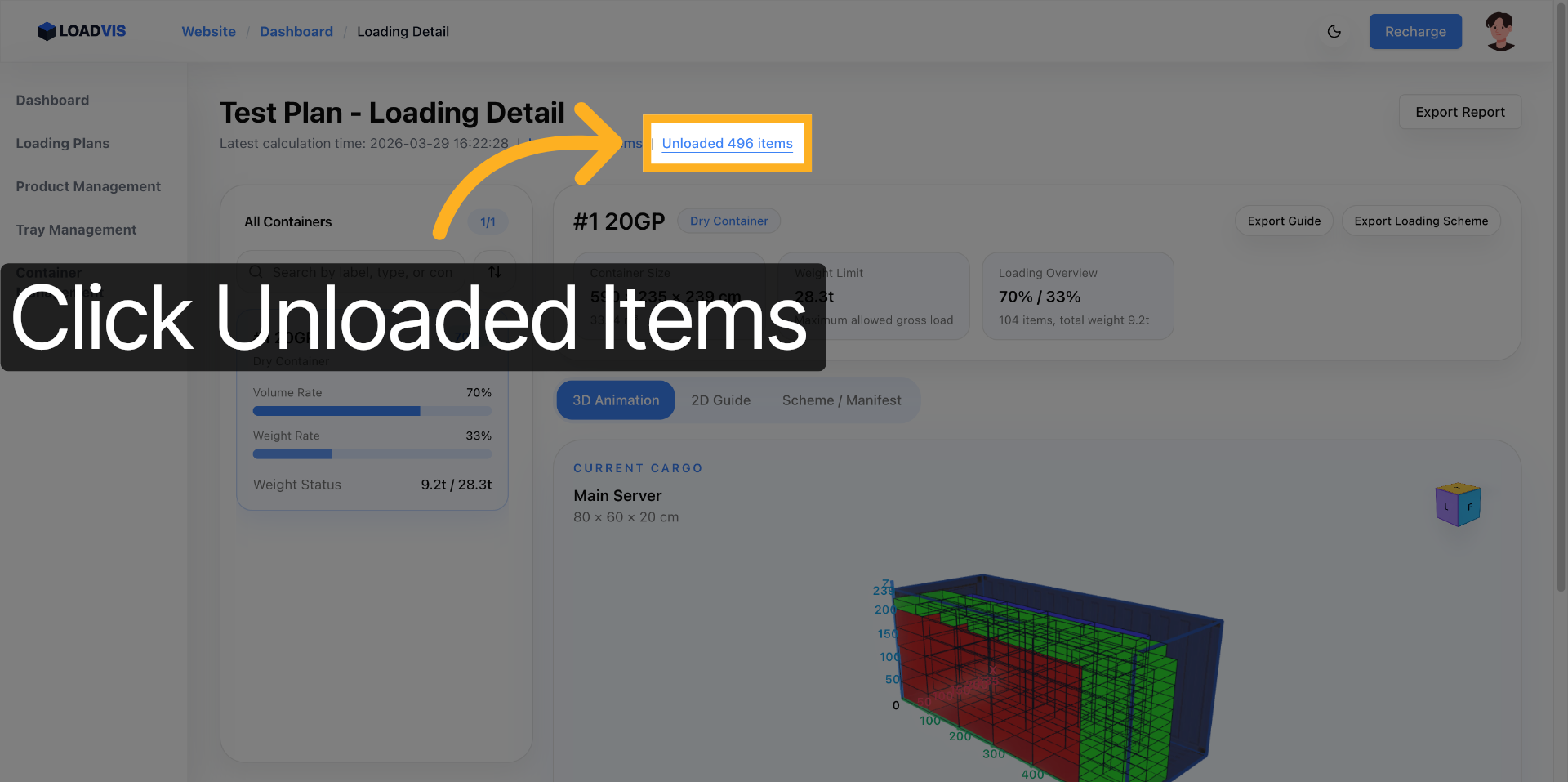
未積載フラグは失敗ではない。計画の破綻を示す診断ログだ。アルゴリズムが制約違反を自動除外した結果がここに表示される。重量超過か。寸法超過か。積み重ね制限違反か。分類を見れば、ボトルネックの所在は瞬時に判別できる。未積載アイテムを単なる「はみ出し」として片付けるな。それは設計の欠陥を可視化するシグナルだ。
3次元の可視化を盲信するな。detail ステップ9。3D回転ビュー。ドラッグ操作で空間干渉を多角的に検証する必要があるが、画面上の衝突判定はあくまで近似値だ。
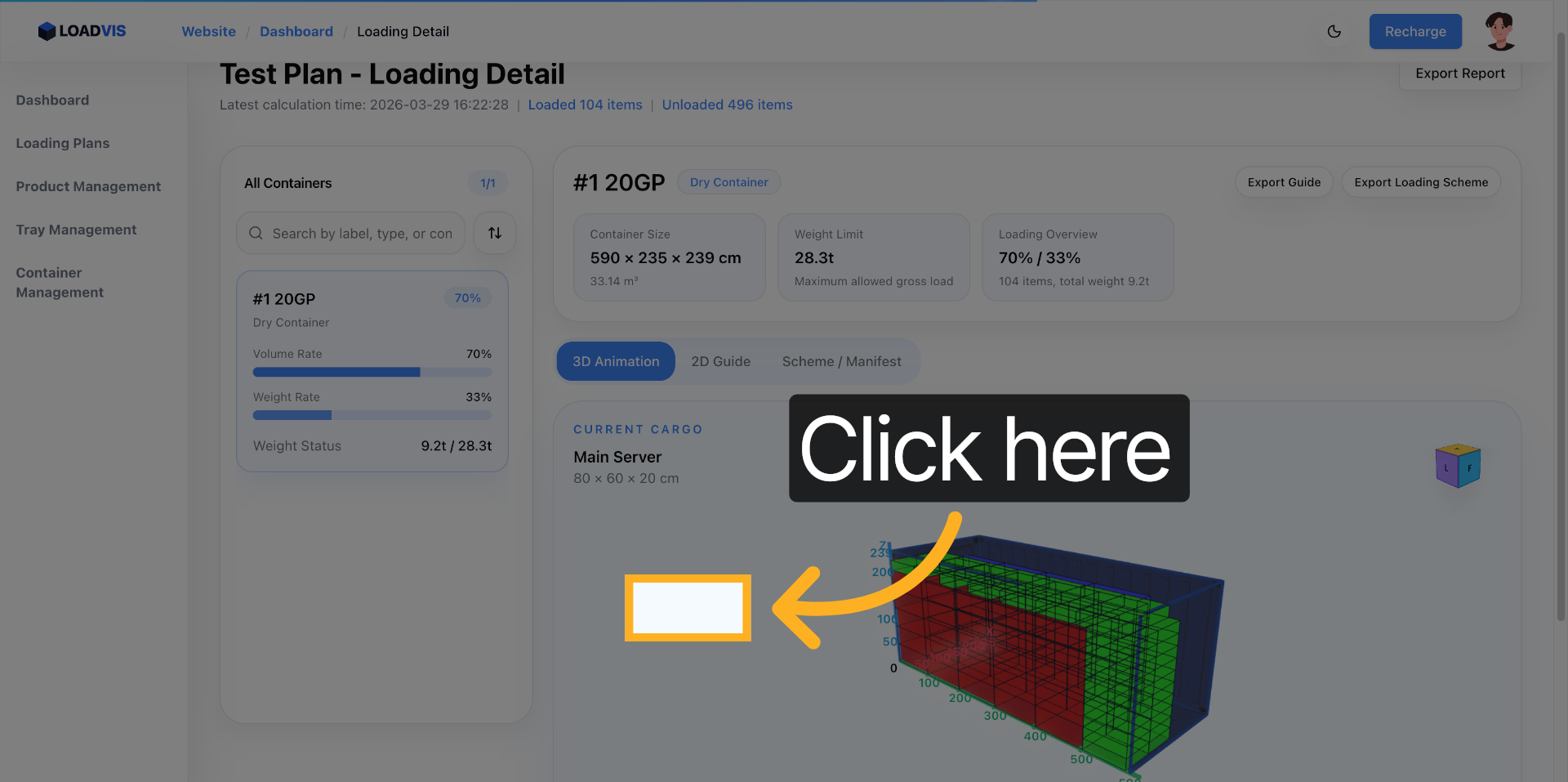
ステップ13の「2Dガイド」へ切り替えろ。
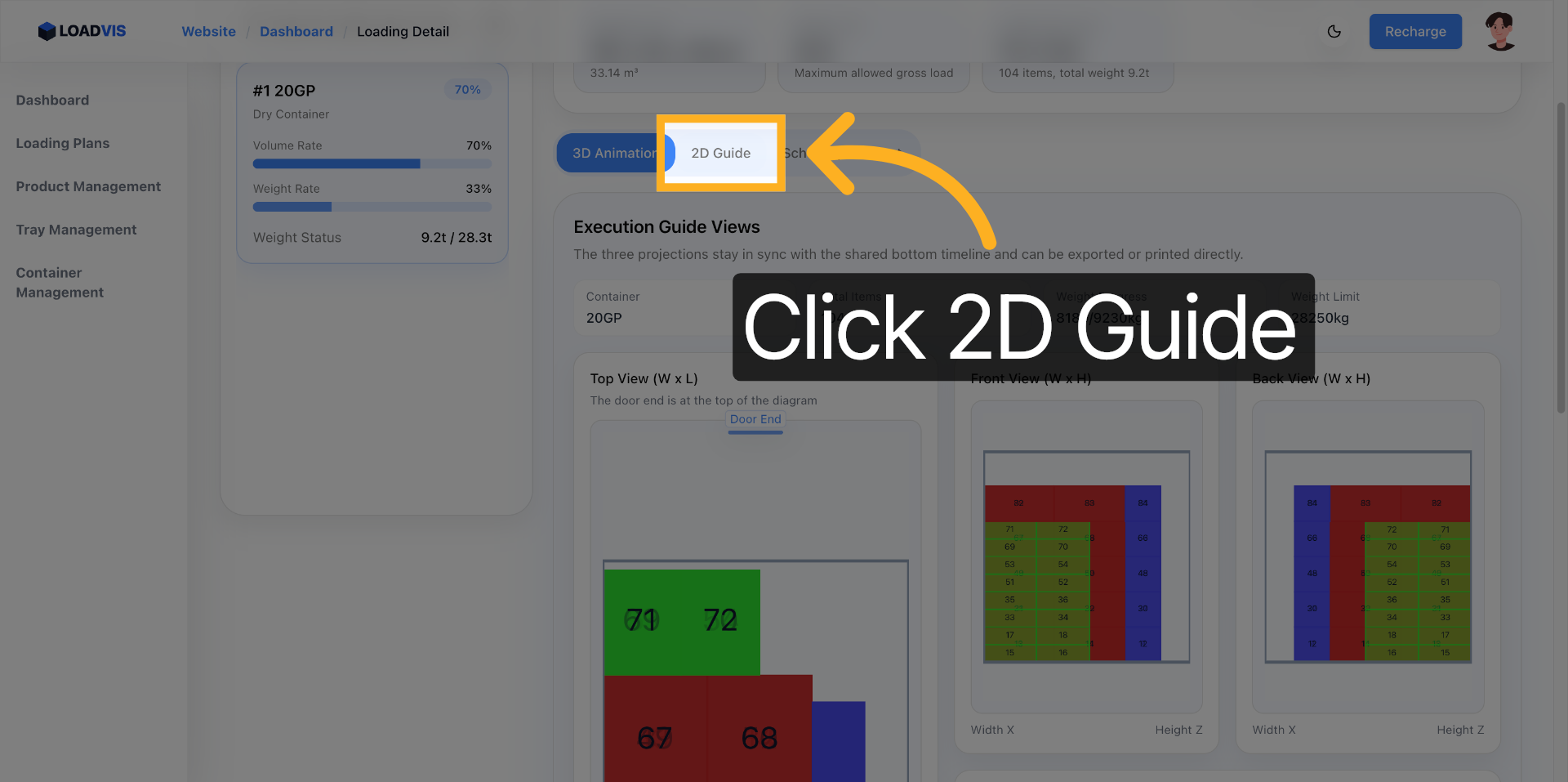
平面投影図は、フォークリフトの進入経路やパレット間の隙間を直線的に把握するのに最適だ。幾何学的な重なりを見逃すな。最後にステップ15。貨物明細リスト。個々の寸法と単位重量を突き合わせ、重量分布曲線を脳内シミュレーションせよ。
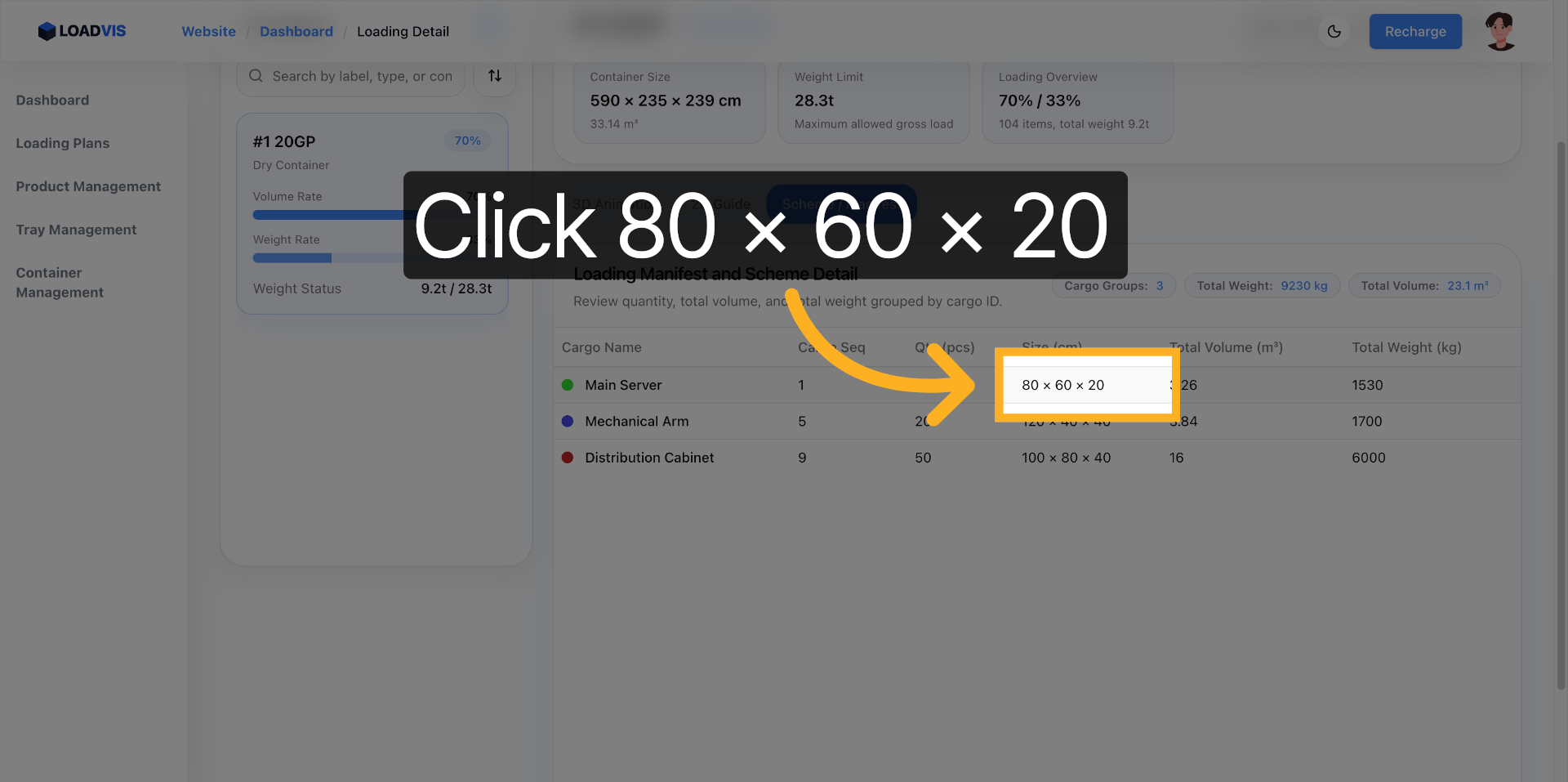
前部に過重が偏れば、車両の操舵特性が狂う。数値を現場の物理法則に変換するのは、これらの検証ゲートだ。数式が現実と交差する地点で初めて、計画は呼吸し始める。
誤ったアプローチ(Wrong)と確実なアプローチ(Reliable)の分岐点は明確である。
Wrong: 総体積のみで判定する。制約パラメータを未設定のままにする。出力プランを盲信してそのまま現場へ持ち込む。結果、中途半端な積載状態での作業停止、追加工賃の発生、車両損傷リスクの顕在化。
Reliable: ドア寸法、重量バランス、最大積み重ね制限を事前定義する。未積載アイテムの理由を分類し、3%を超える場合は再計算をトリガーする。2D/3Dビューと倉庫内の実機動線をクロスチェックする。閾値超過が発生した時点でプランを棄却し、パラメータ調整後に再実行する。
条件分岐をコードのように運用せよ。IF (unloaded_rate > 3%) THEN recalc_params() ELSE approve_plan()。曖昧な感覚判断は排除する。手戻りは設計の甘さに対する罰金だ。
ツールが保証する範囲と、人間が手動で検証しなければならない範囲。この線引きを曖昧にすれば、必ず摩擦が生まれる。アルゴリズムは空間充填の最適解を提示する。制約違反のレコードを自動除外する。容積率と軸重分布を算出する。積載シーケンスを可視化する。ここまではシステムの仕事だ。しかし、床の耐荷重の個体差はカバーできない。湿気で撓んだパレットの状態も認識しない。実機の旋回半径がカタログ値と異なる事実も無視する。ラベルの剥がれや突起物の干渉、作業者の習熟度差。これらはすべて手動検証の領分だ。
境界基準を設けよ。クリアランスが50mm未満の場合、3Dモデルの衝突判定精度は実測に及ばない。必ず現場メジャーで検品する必要がある。CG(重心)偏差がコンテナ長の10%を超えた場合、アルゴリズムの自動分散機能だけでは補正が効かない。手動で配置順序を組み替えるか、重量の軽い品物を後部に移動させる必要がある。ツールの出力は設計図だ。現実は常に設計図を歪める。その歪みを許容範囲内に収めるのが、計画担当者の職能だ。数値だけを追いかけるな。物理法則を敬畏せよ。