理論容積の最適化が現場で頓挫する構造的欠陥:入口制限と重量分布の盲点
1. シナリオと問題の提示
計画フェーズでは容積率が90%を超え、計算エンジンが冷然と「最適化完了」を出力する。画面の3Dグリッドは整然と埋まっている。しかし現場搬入の瞬間、その秩序は物理的に崩壊する。フォークリフトのマストがコンテナ扉の開口部に干渉し、進入不能に陥る。あるいは貨物が奥に偏重し、吊り上げ時の転倒リスクやトラックシャーシの軸重超過を引き起こす。数式上は成立している。実行不可能なだけで。これが「計画成功・現場失敗」を分断する典型的な物理的断層である。ソルバーは空間を埋めるが、物理境界は定義しない。アルゴリズムが数学的解を吐き出す行為と、フォークリフトが実際にスラッシュラインへ進入できるかという事象は、別次元のレイヤーで管理される必要がある。
2. 過小評価の理由
なぜこの断層が軽視され続けるのか。構造的な要因が3つ絡んでいる。第一に、計画担当者の認知バイアスだ。容積充填率やSKU搭載数を唯一の成功指標と捉え、荷役動線や構造的制約を二次的なパラメータと処理しがちだ。第二に、標準コンテナ型式(20OT/40HQ等)のベンダーデフォルト値への過信。仕様書の数値は理論値に過ぎない。実機との乖離、あるいはドア開口部が内部寸法よりも幾何学的に狭いという絶対境界を、初期設定で無視する。第三に、アルゴリズムのデフォルト挙動。ソルバーは明示的に制約を与えない限り「空間探索と容積最大化」を目的関数とする。実行可能性の検証層は、初期状態ではオフになっているのだ。経験則だけで進めると、必ずどこかで物理的な摩擦が生じる。パラメータの不在は、計画を空中楼阁へ変質させる。
3. 手順からの重要操作抽出
断絶を埋めるには、パラメータ定義の粒度を上げる必要がある。計算前の設定ワークフローが、そのまま実行可否を決定する分岐点となる。コンテナ管理画面における「内部寸法」と「ドア開口高さ×幅」の個別入力。「最大積載量」の正確な定義と記録。AIテキスト解析機能による仕様抽出後の、数値のクロスチェック。設定の永続化と計算前バリデーションの実行。これらが骨子となる。
実際のシステム構築において、これらのパラメータを定義する経路は以下の通りだ。単なるデータ入力ではない。物理制約をデータベースに刻む作業である。
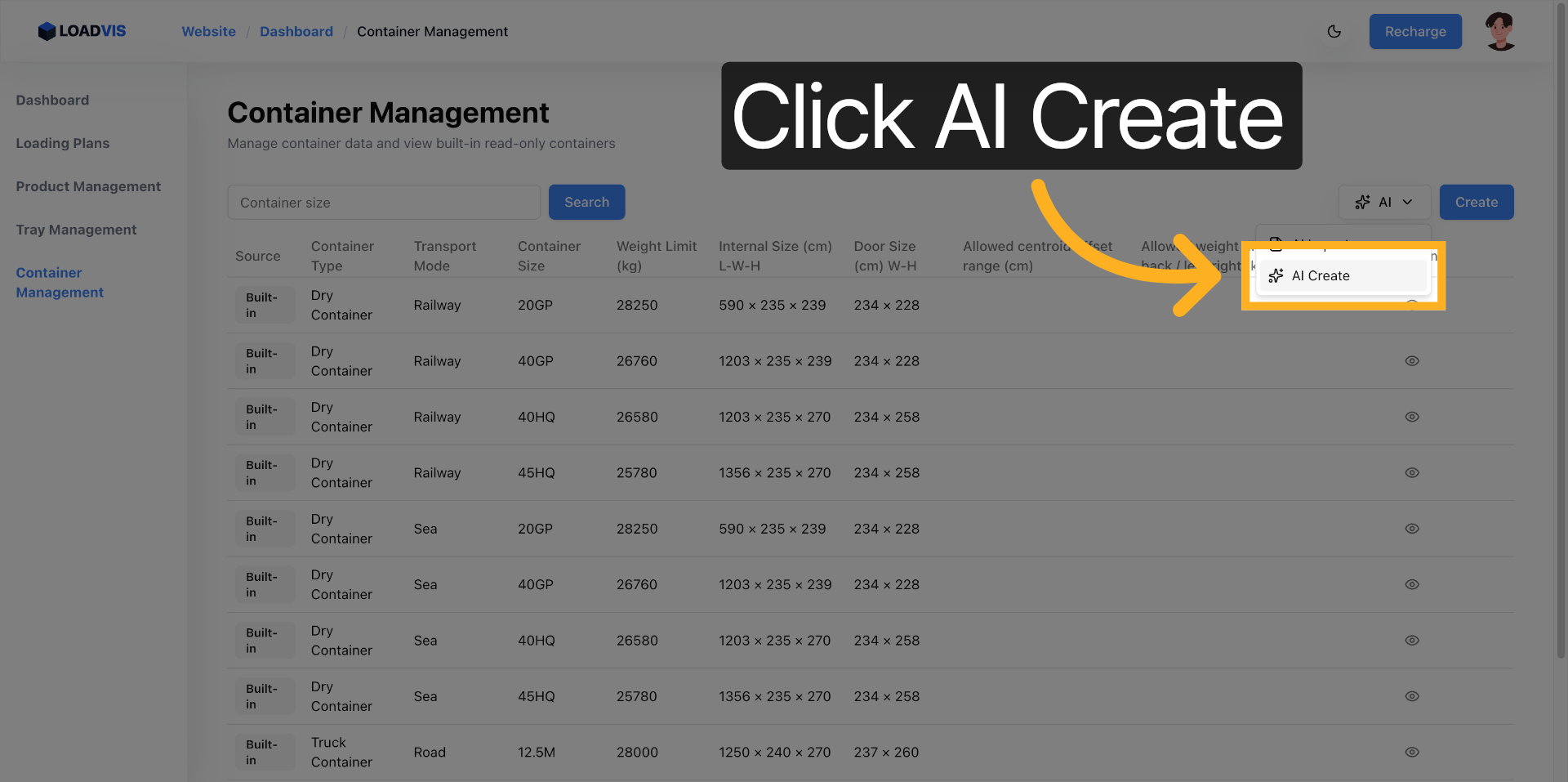
まずはコンテナ管理領域へ進入する。
 AI作成機能を起動し、非構造化テキストからの自動認識を走らせる。
AI作成機能を起動し、非構造化テキストからの自動認識を走らせる。
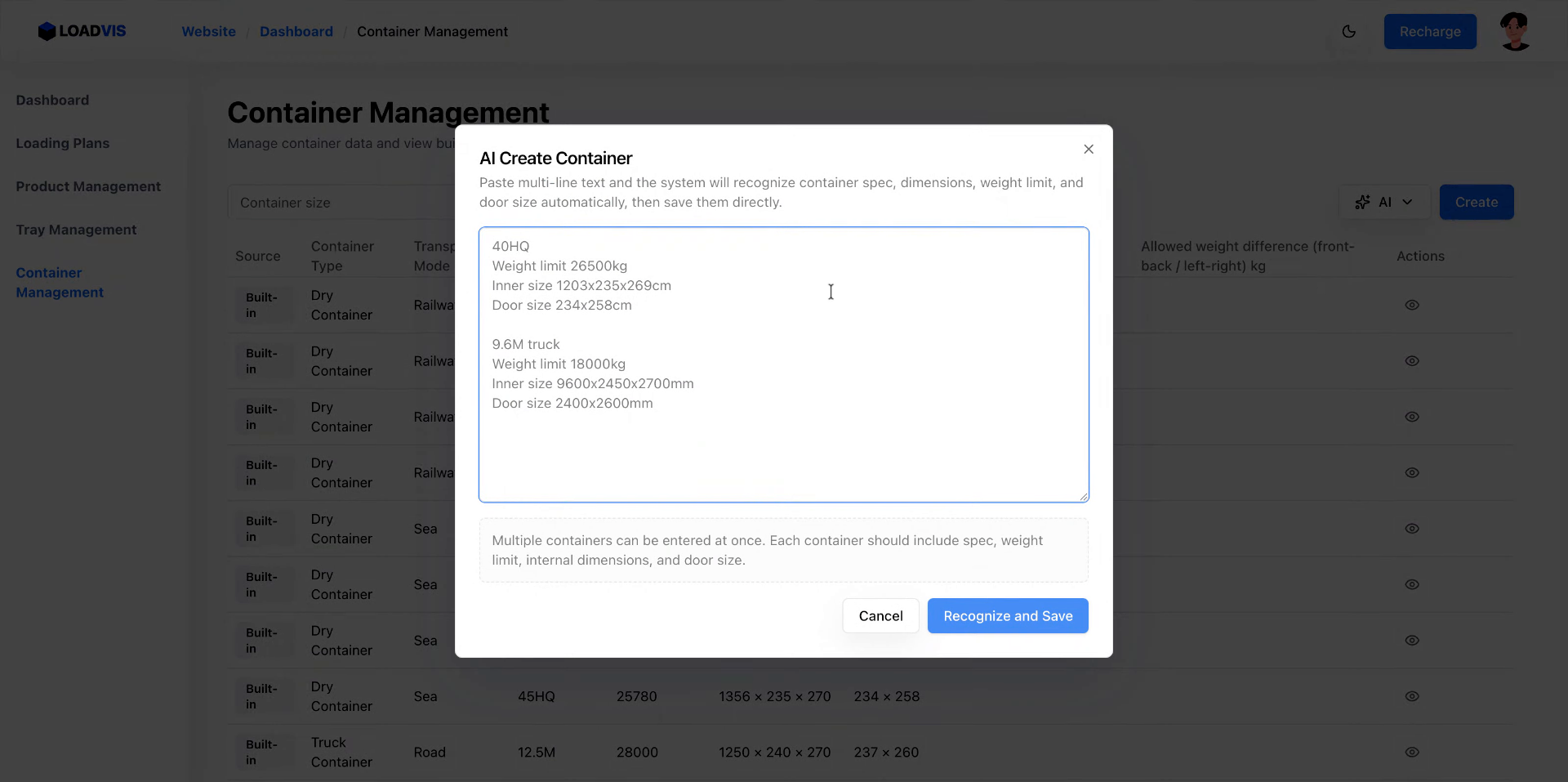
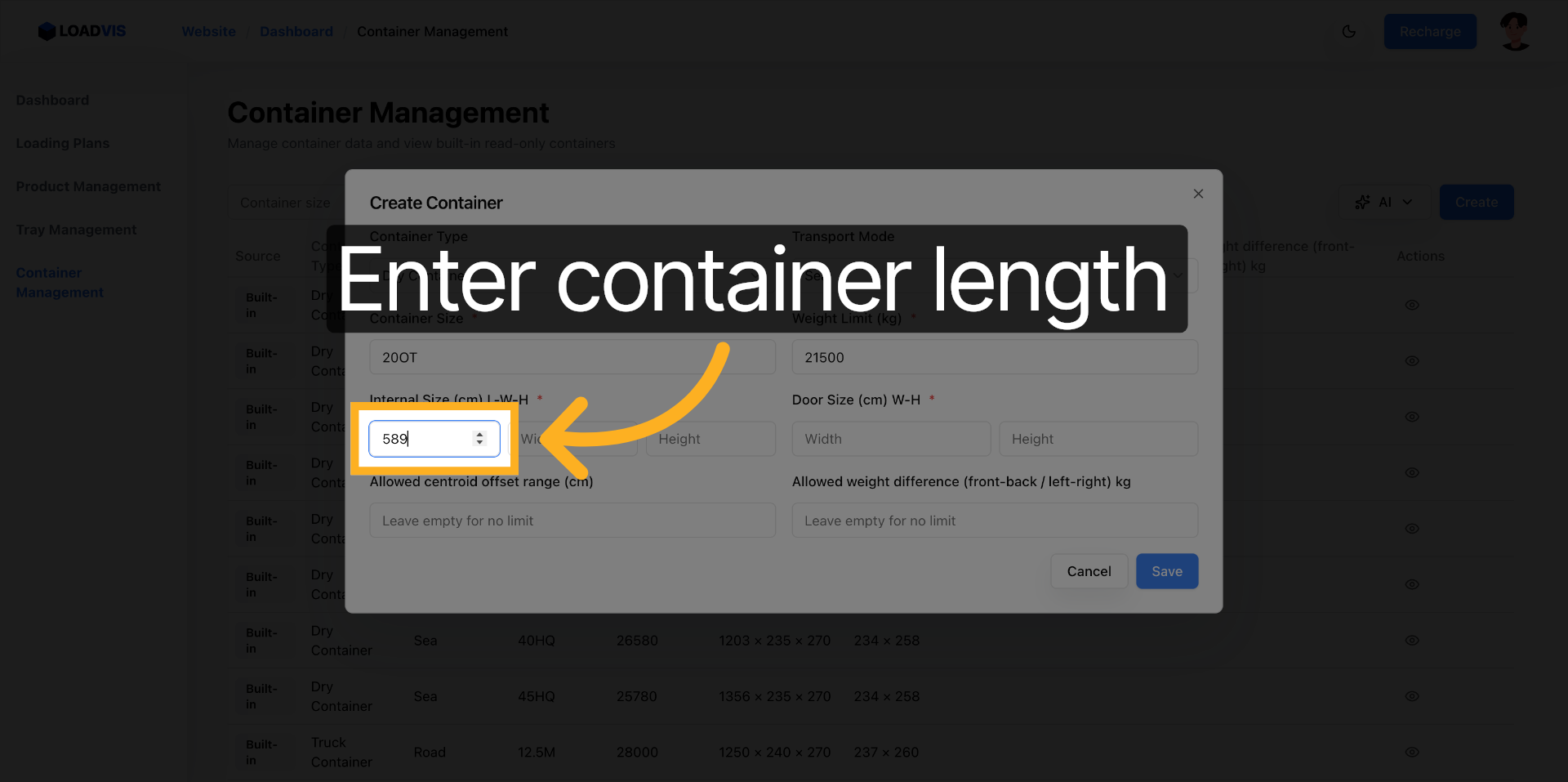
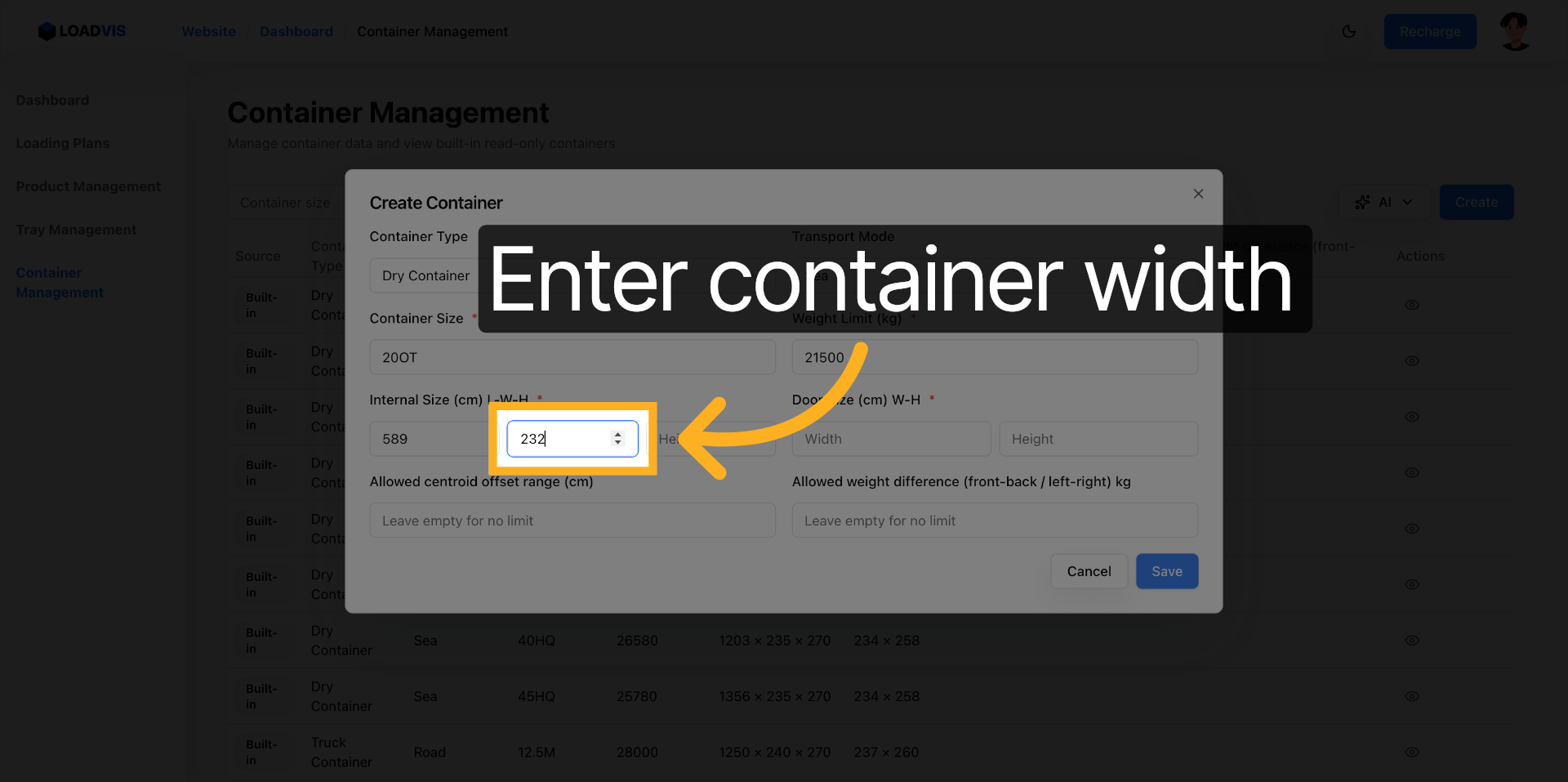
 仕様テキストを投入する。例えば「20OT Max Weight: 21,500 kg Internal Dimensions: 589×232×233 cm Door Opening: 233×223 cm」だ。システムが各数値を解析する。
仕様テキストを投入する。例えば「20OT Max Weight: 21,500 kg Internal Dimensions: 589×232×233 cm Door Opening: 233×223 cm」だ。システムが各数値を解析する。
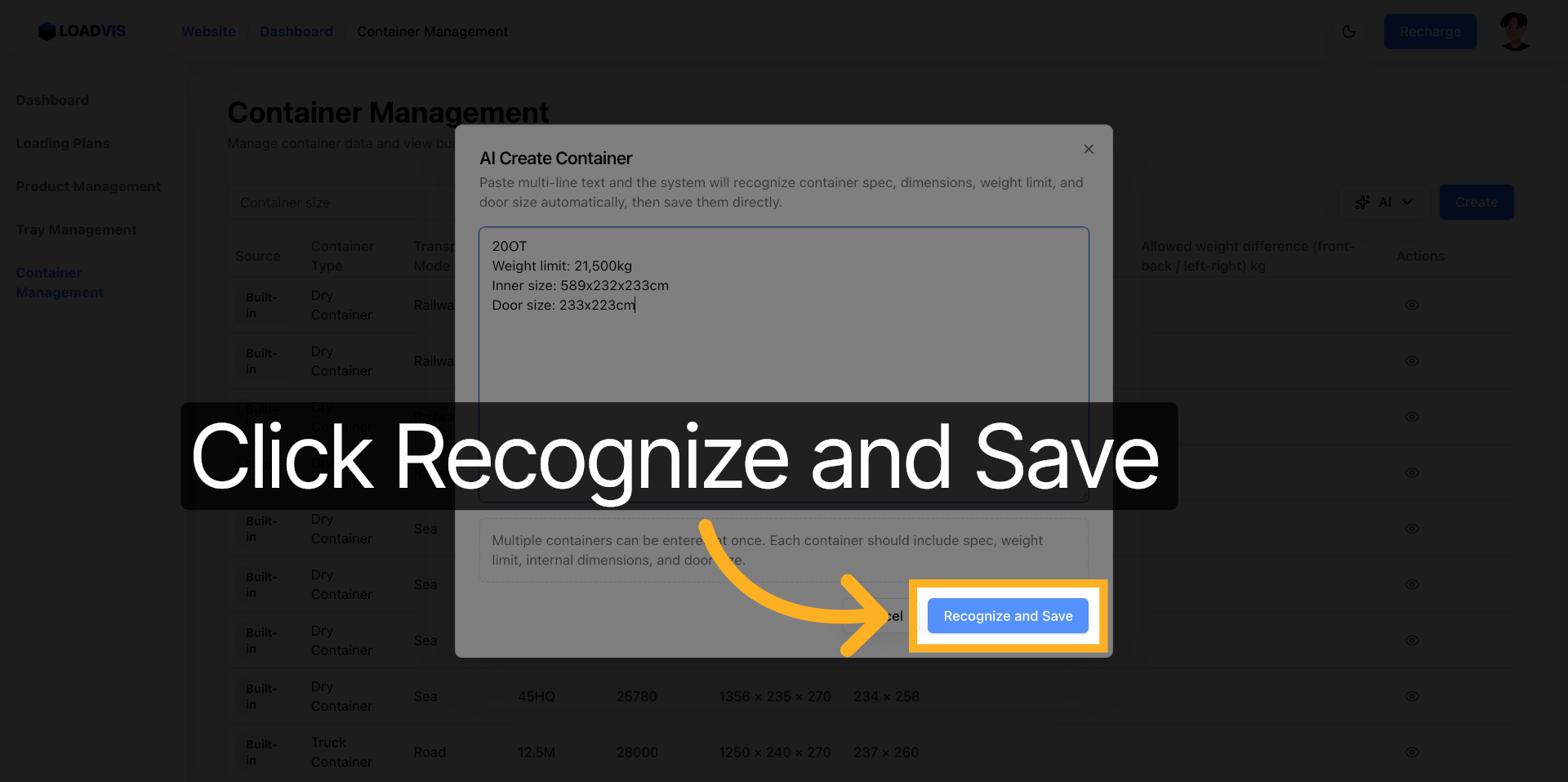
 「認識して保存」を実行する。解析が完了すれば、一覧が更新される。
「認識して保存」を実行する。解析が完了すれば、一覧が更新される。
ただし、自動認識は初期ドラフト生成に過ぎない。手動での修正フロー、あるいはゼロからパラメータを定義するフローも掌握していなければならない。新規作成画面では、コンテナコードを固有識別子として設定する。
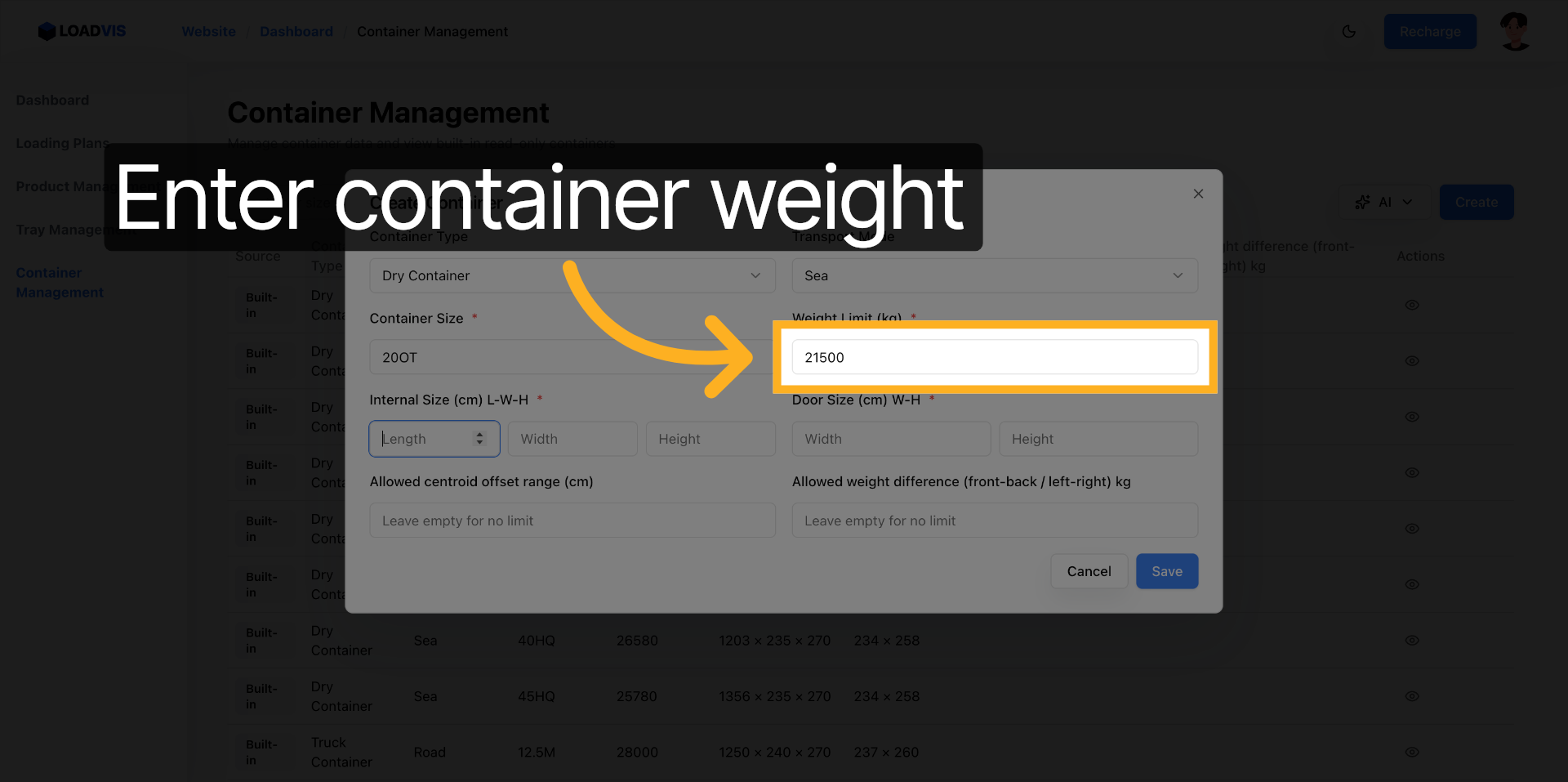
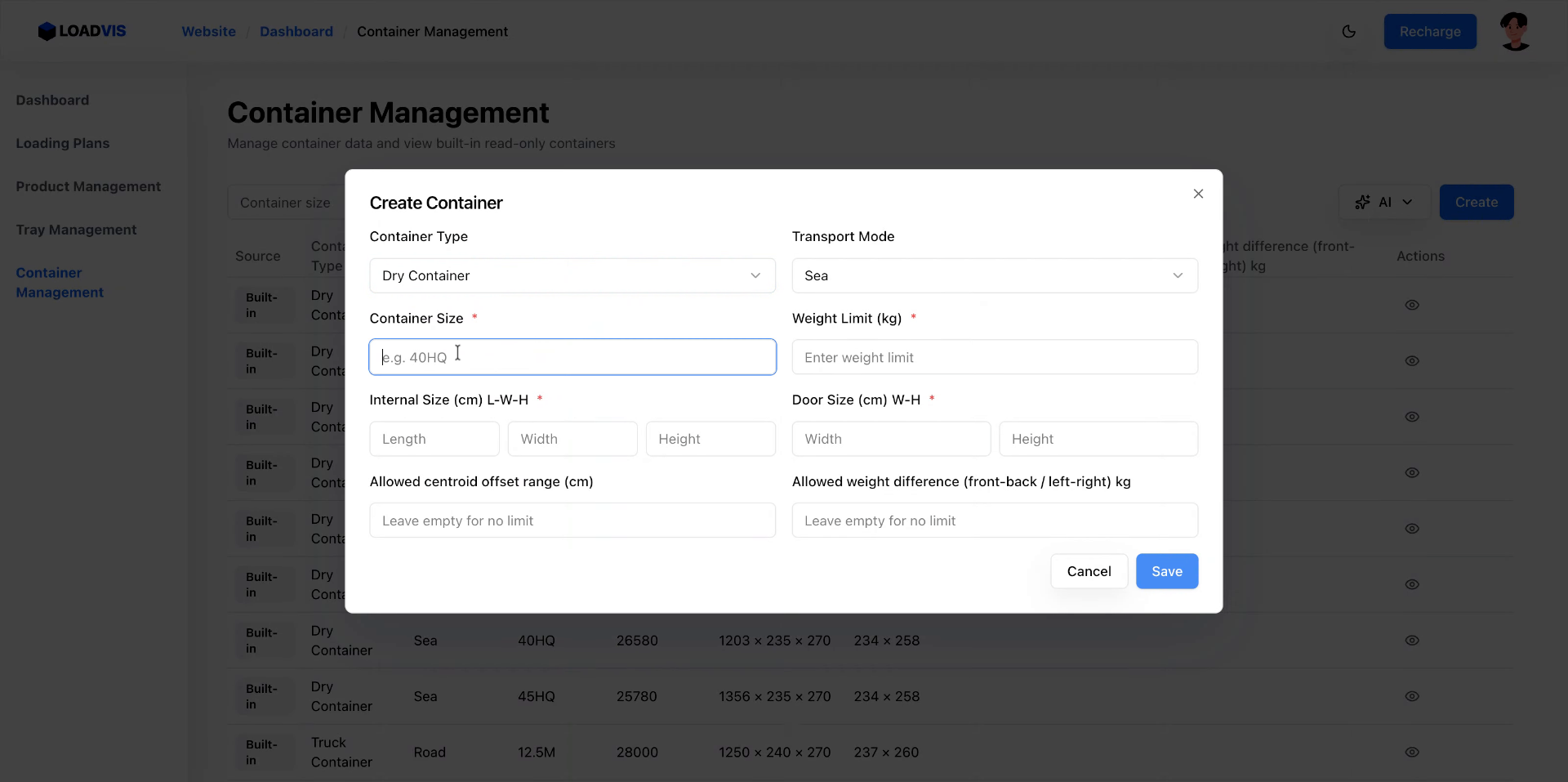 最大積載量に定格容量(例:21500 kg)を定義する。
最大積載量に定格容量(例:21500 kg)を定義する。
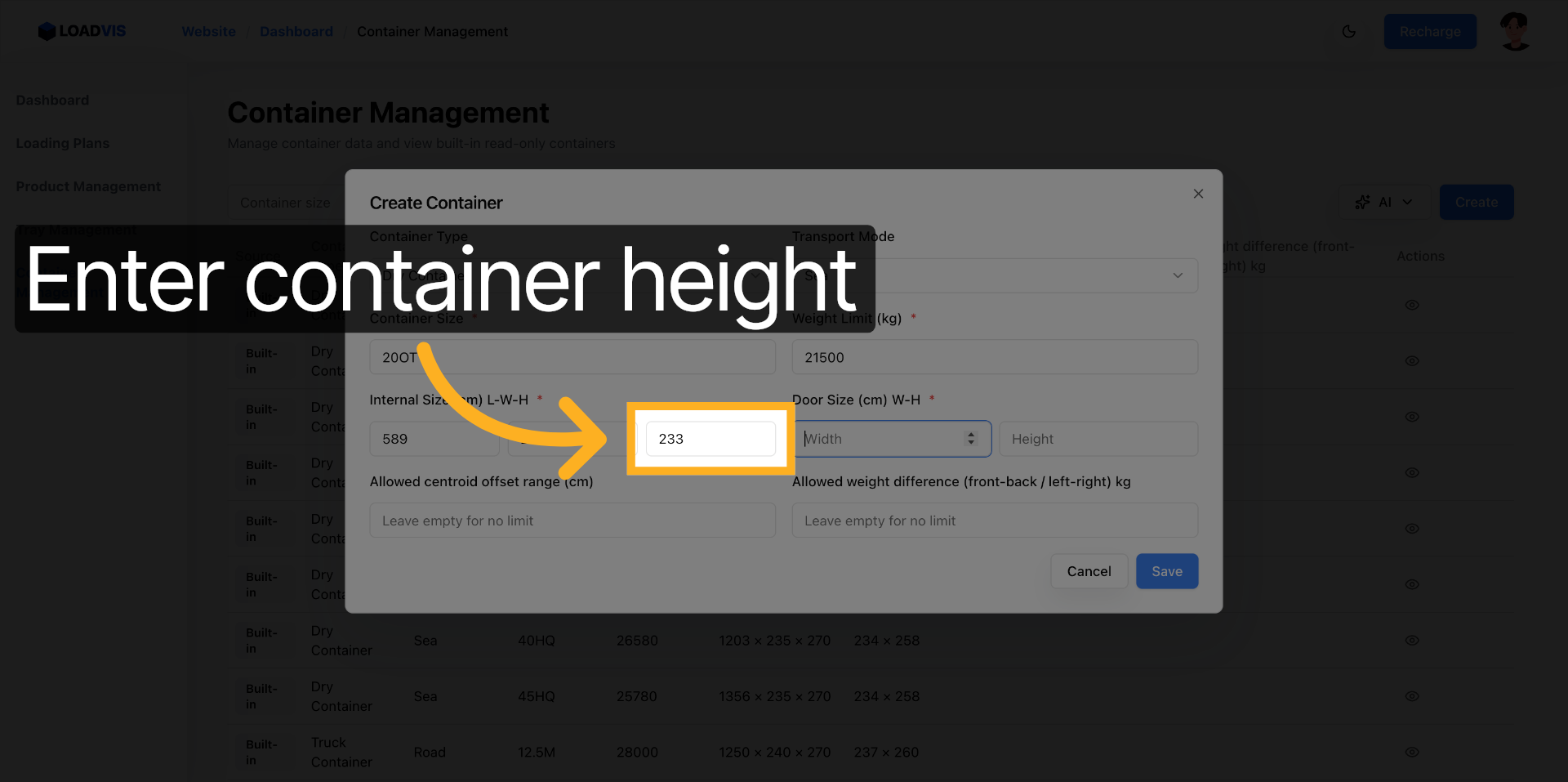
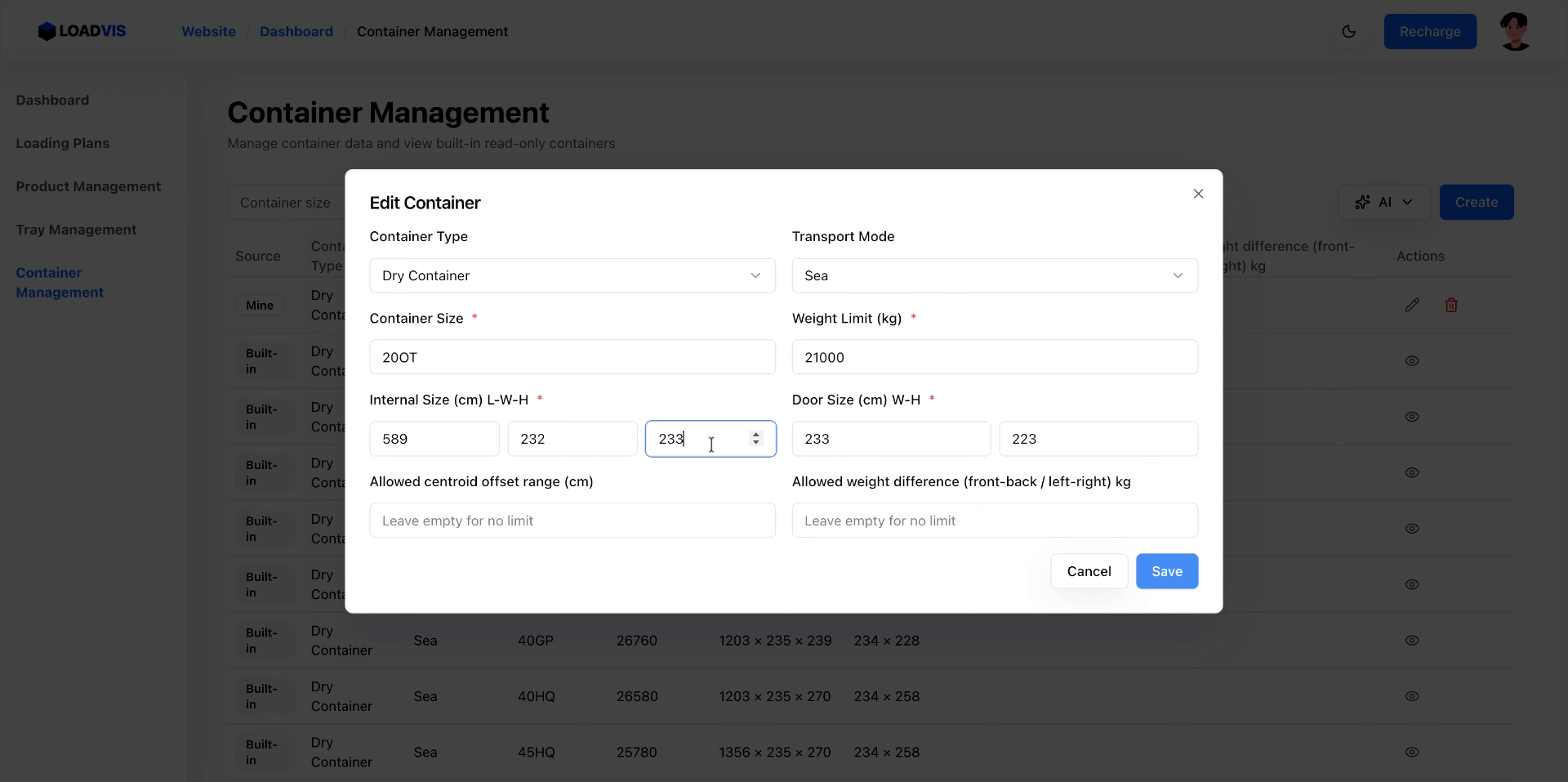
 内部の三次元寸法を個別に割り当てる。
内部の三次元寸法を個別に割り当てる。
4. 操作の重要性の焦点
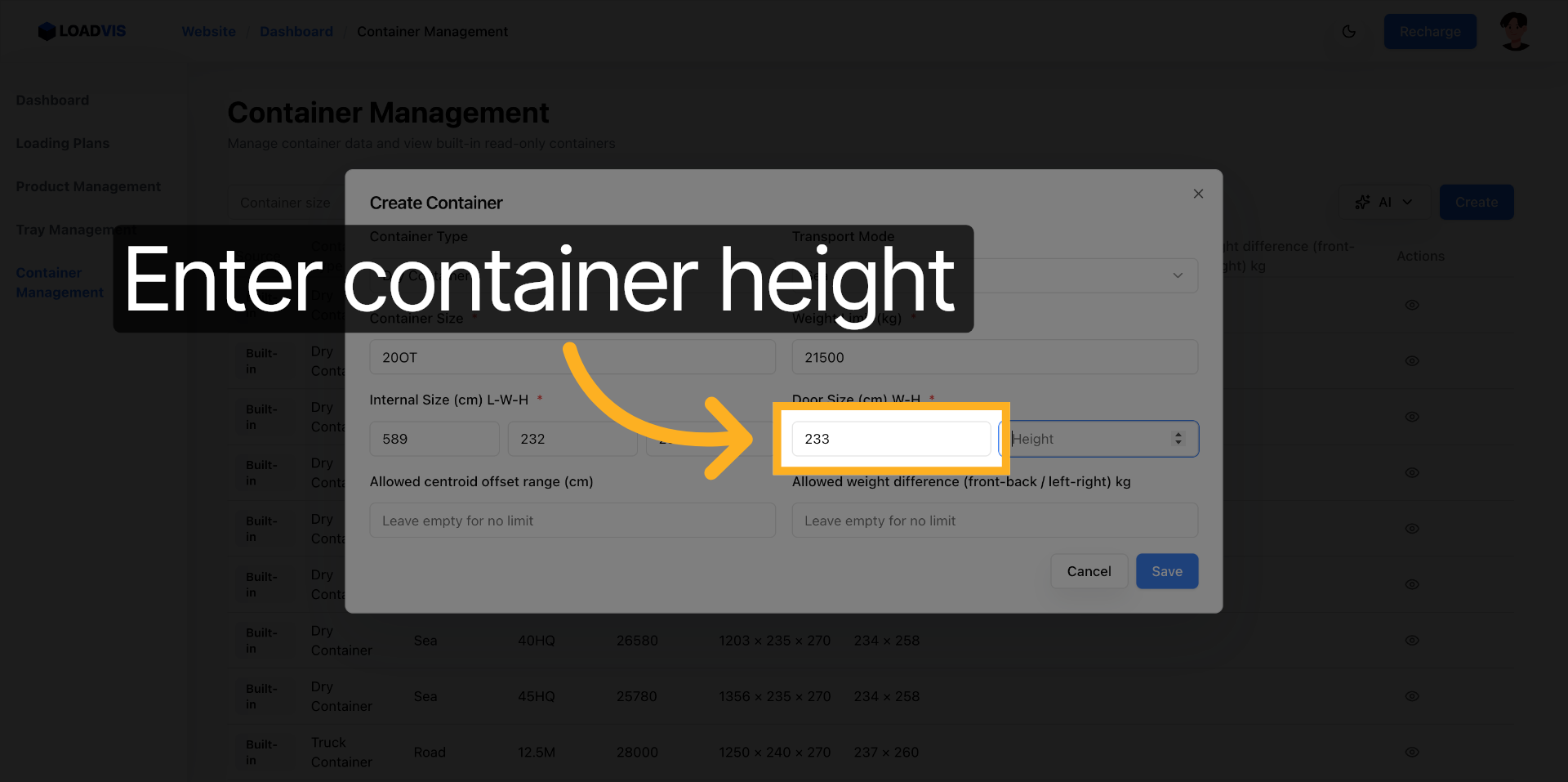
これらの手順がなぜ分岐点となるのか。物理的閾値の定義精度が、そのままソルバーの探索空間を規定するからだ。ドア寸法は「内部容積」ではなく「実作業アクセス可能領域」の絶対境界である。積載上限と許容重心偏差は、荷役機器の運用限界および構造物の安全係数そのものだ。これらのパラメータが欠落、あるいは不正確な場合、計算エンジンが空間充填率のみで解を探索する。結果として、現場で実行不可能な配置が出力される。
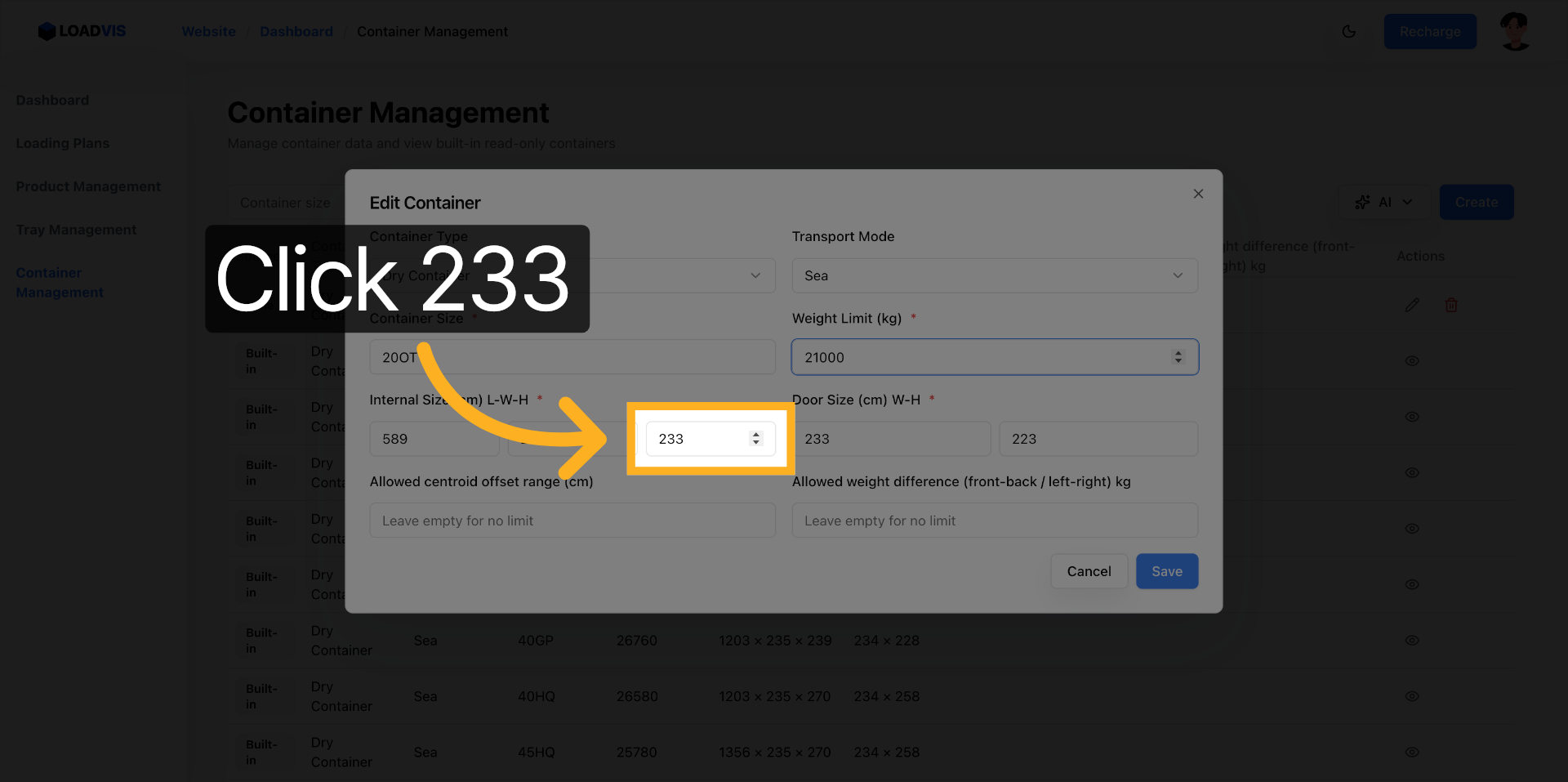
ここで肝心なのがドア開口寸法だ。内部有効高さとは別に、実際の荷役アクセス高を分離して入力する。
 検証を経て保存を実行する。永続化の瞬間、設定は計算エンジンへ渡される。
検証を経て保存を実行する。永続化の瞬間、設定は計算エンジンへ渡される。
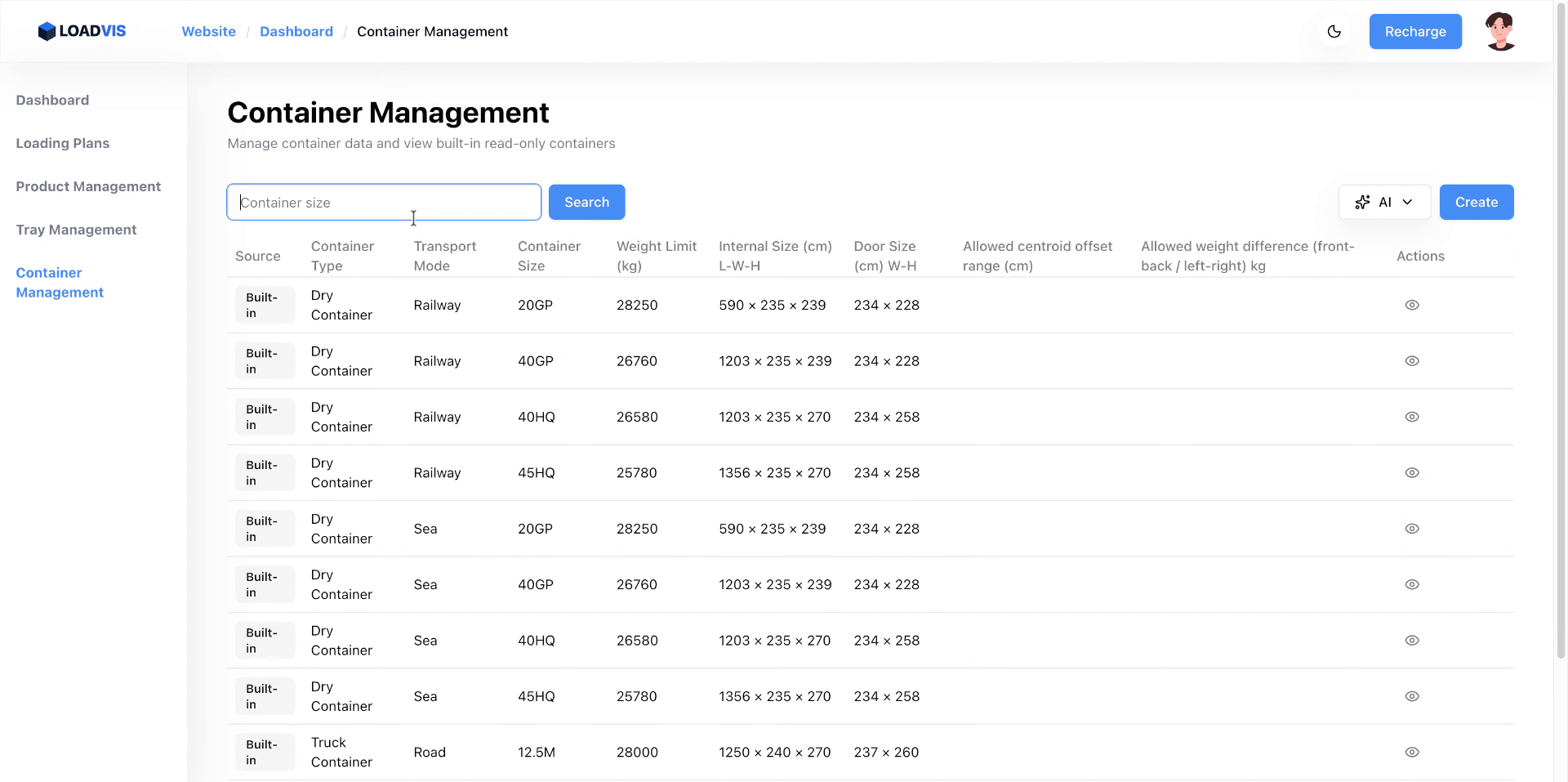
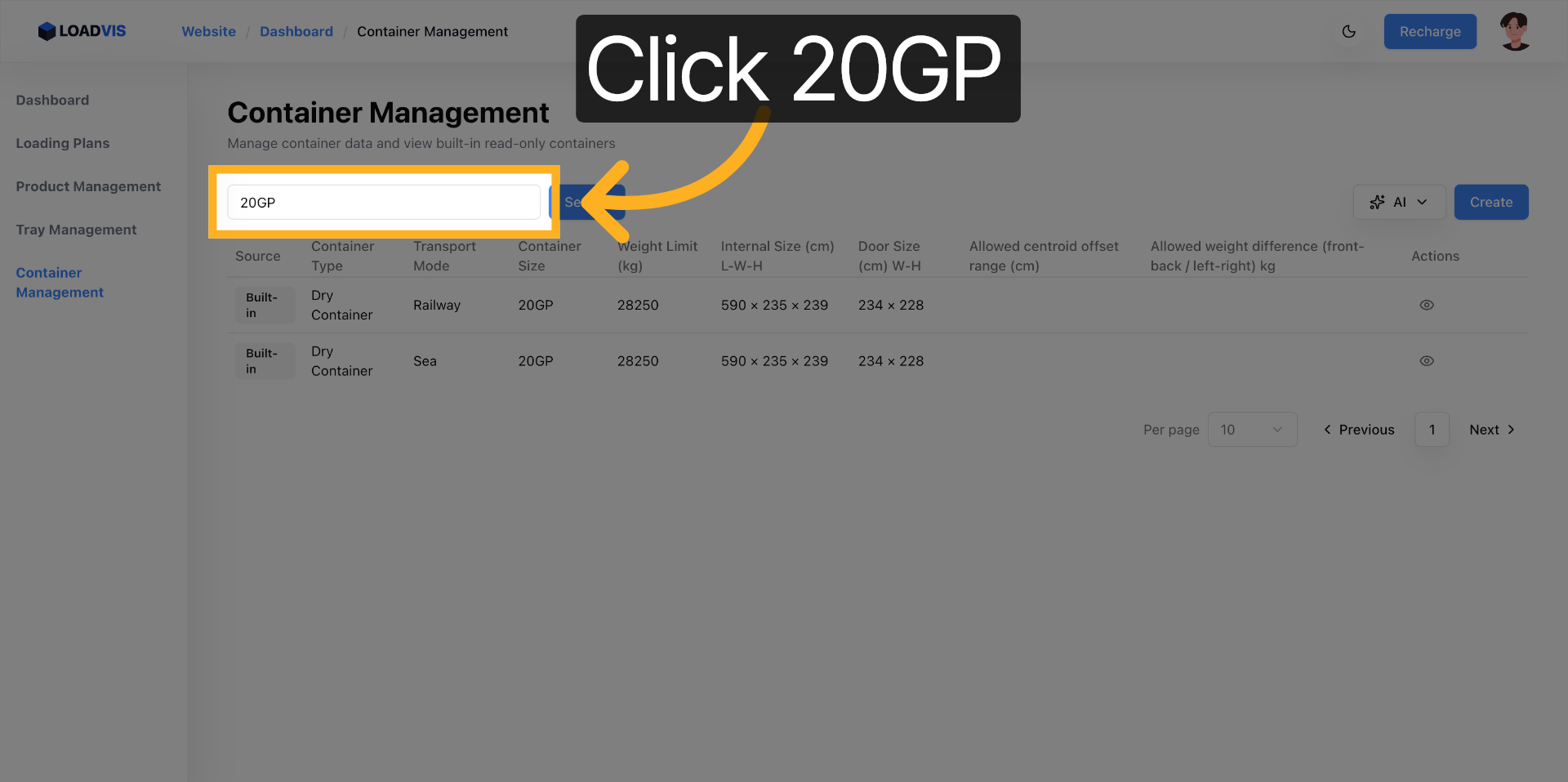
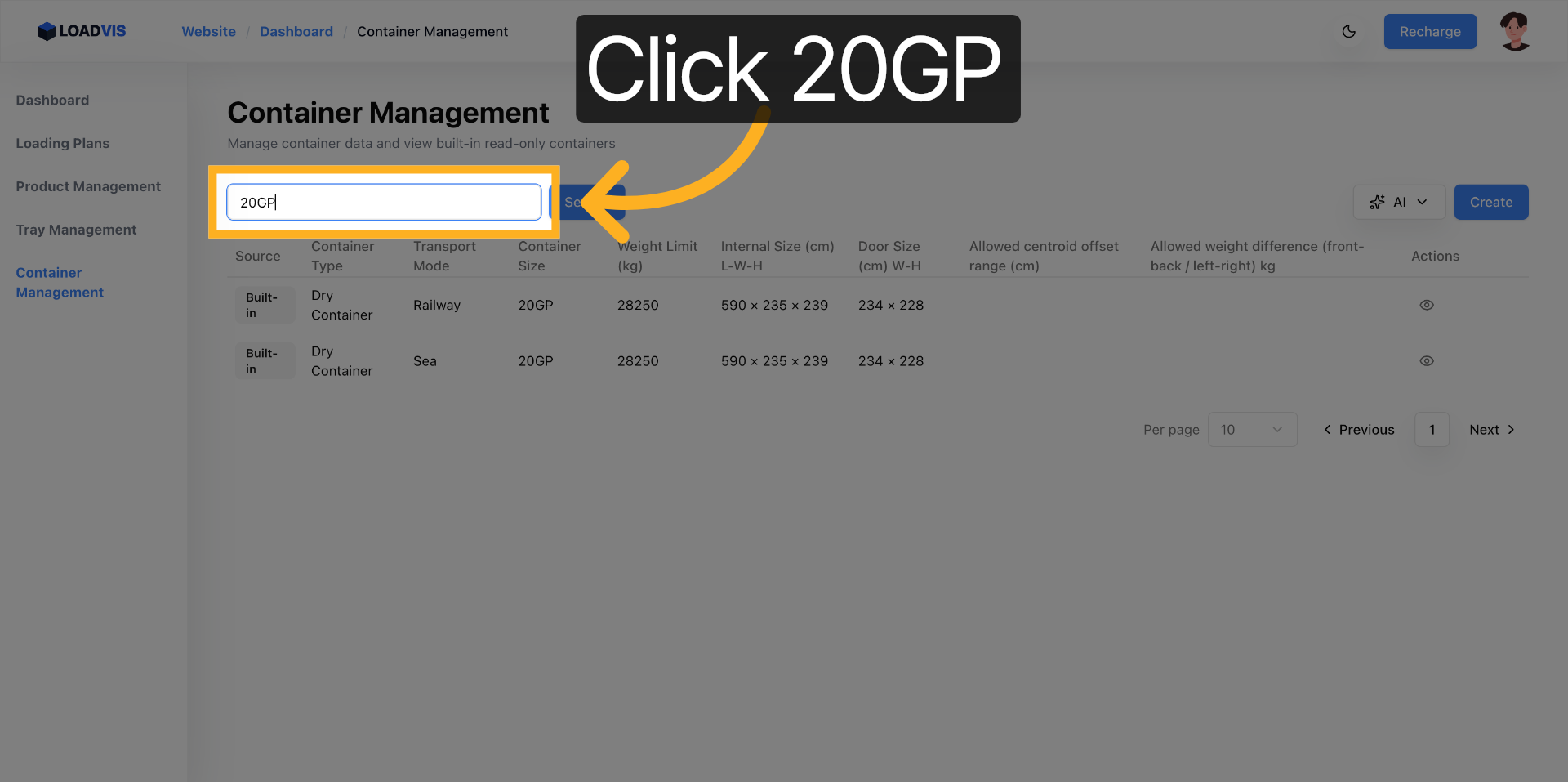
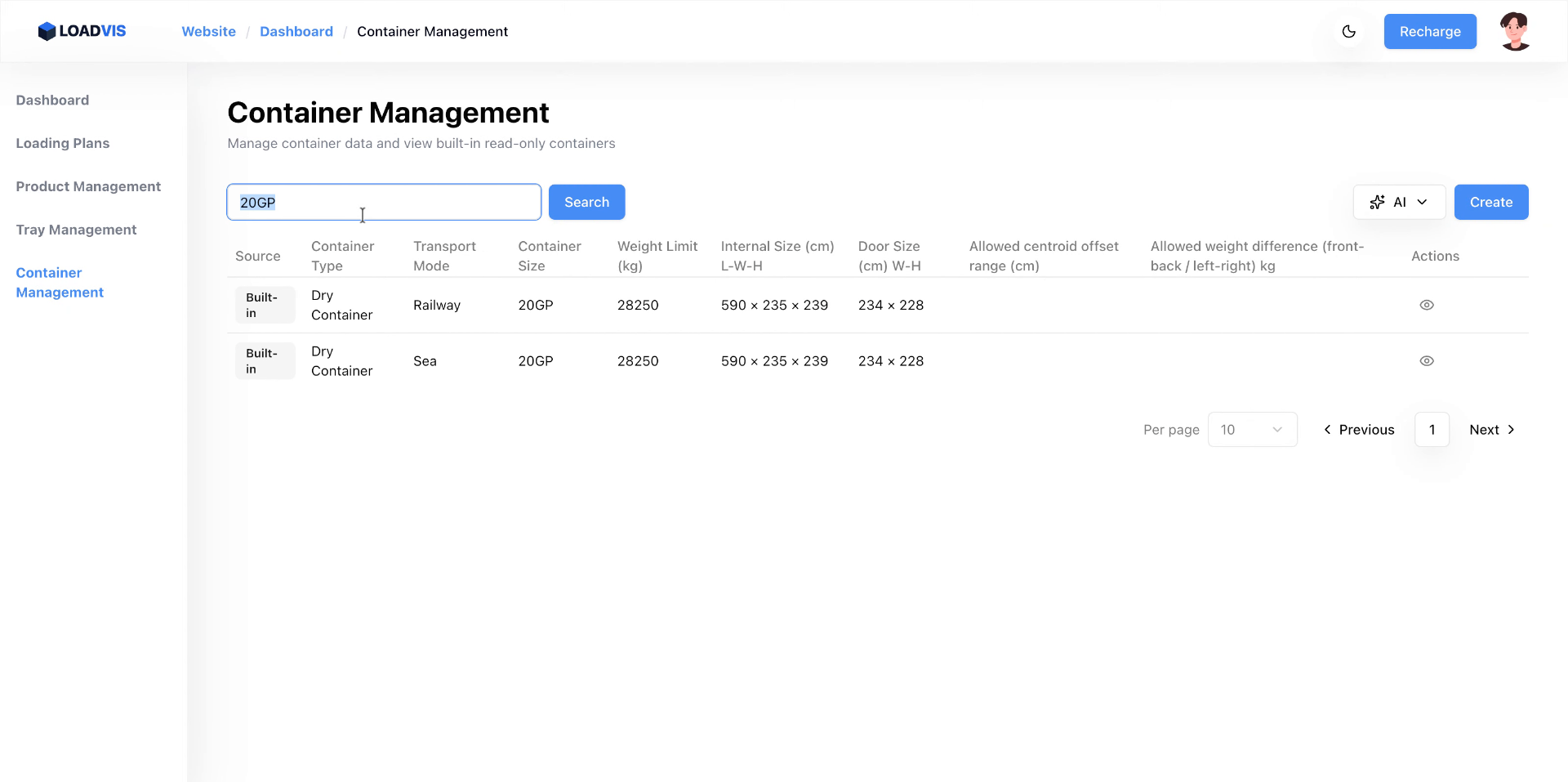
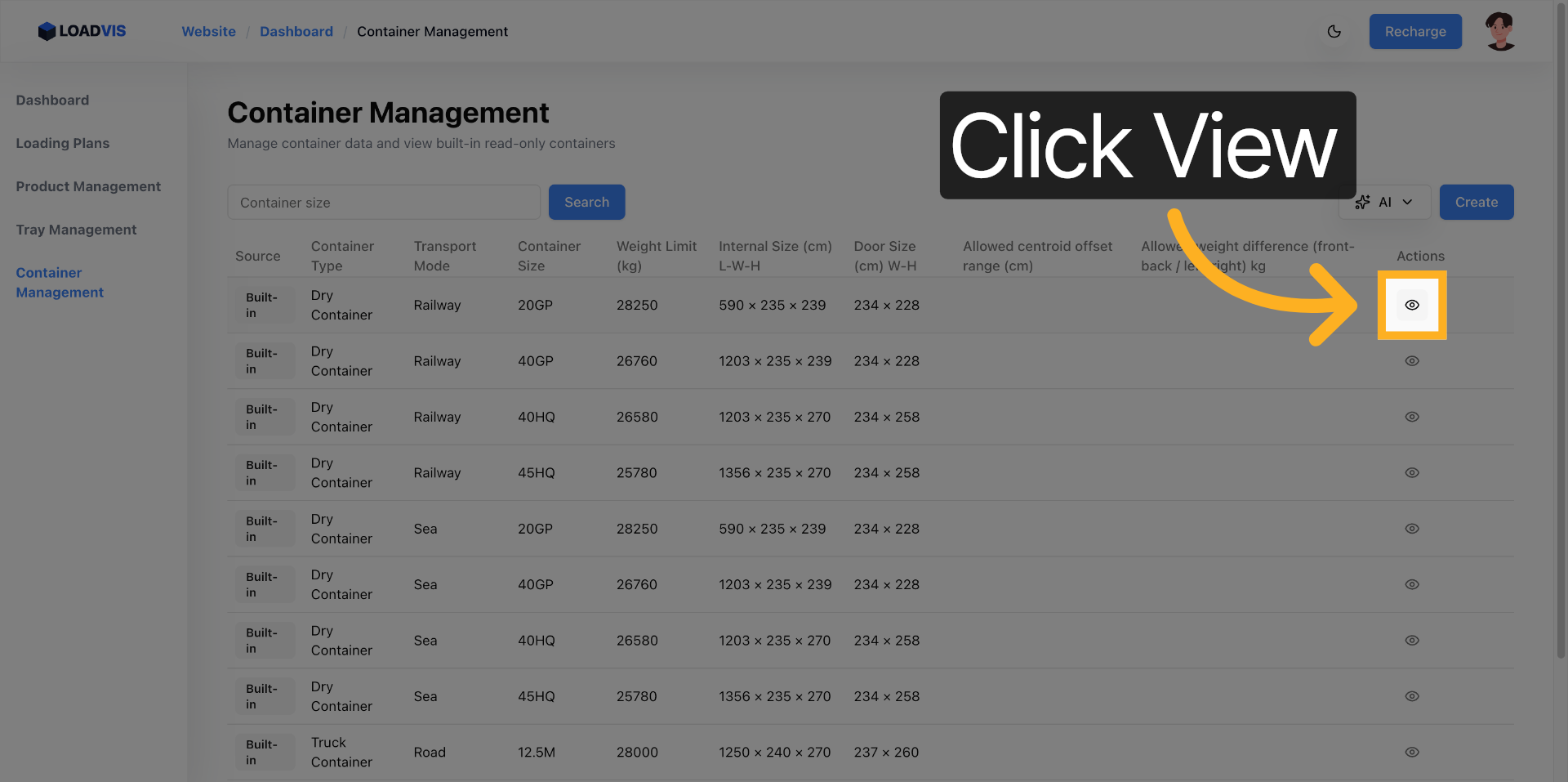
リスト検索やフィルタリング機能も、単なるデータ閲覧用ではない。設定値の整合性を確認する最終検証ポイントとして機能する。特定コンテナを選択し、詳細パネルを展開する。
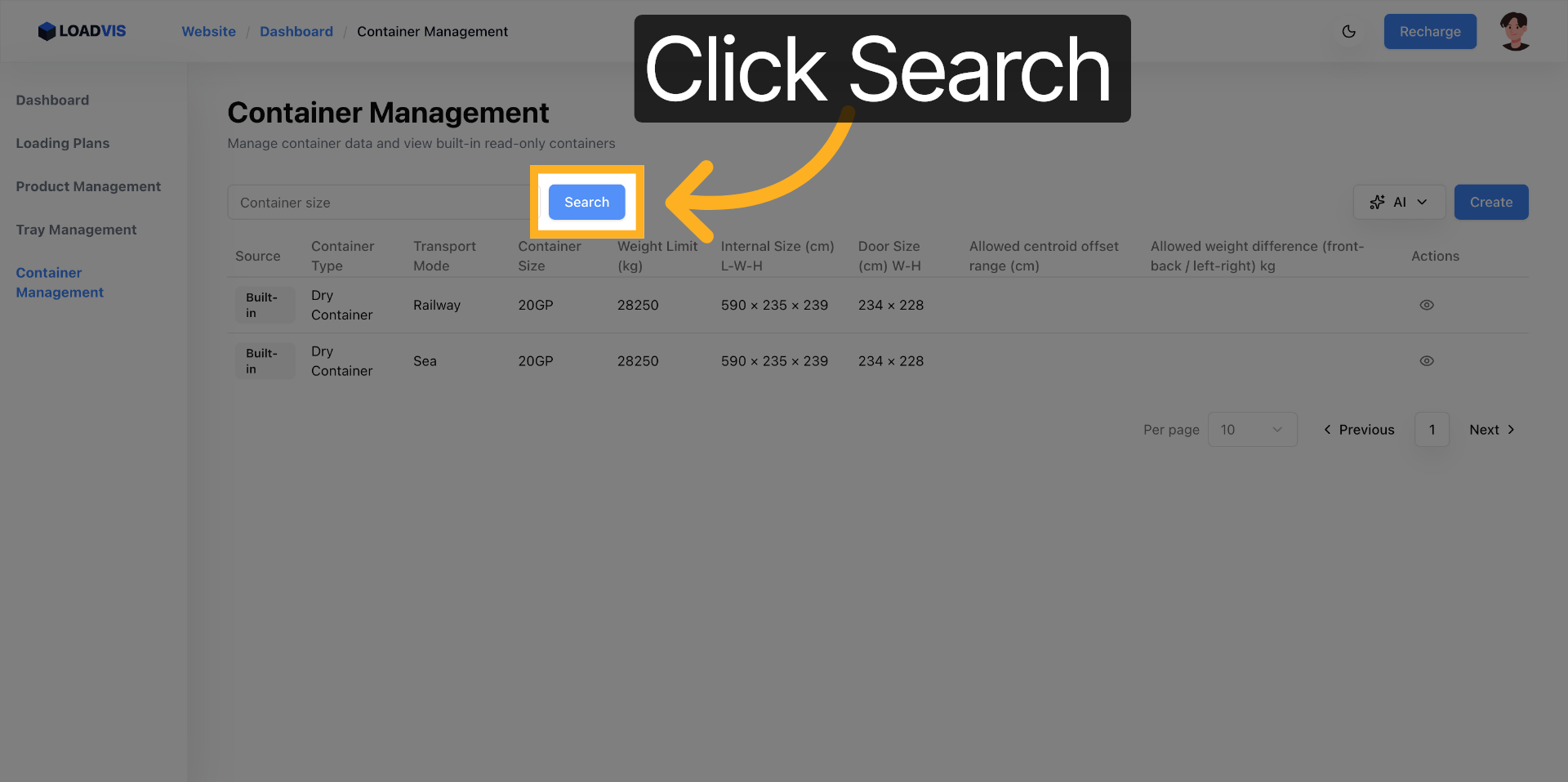
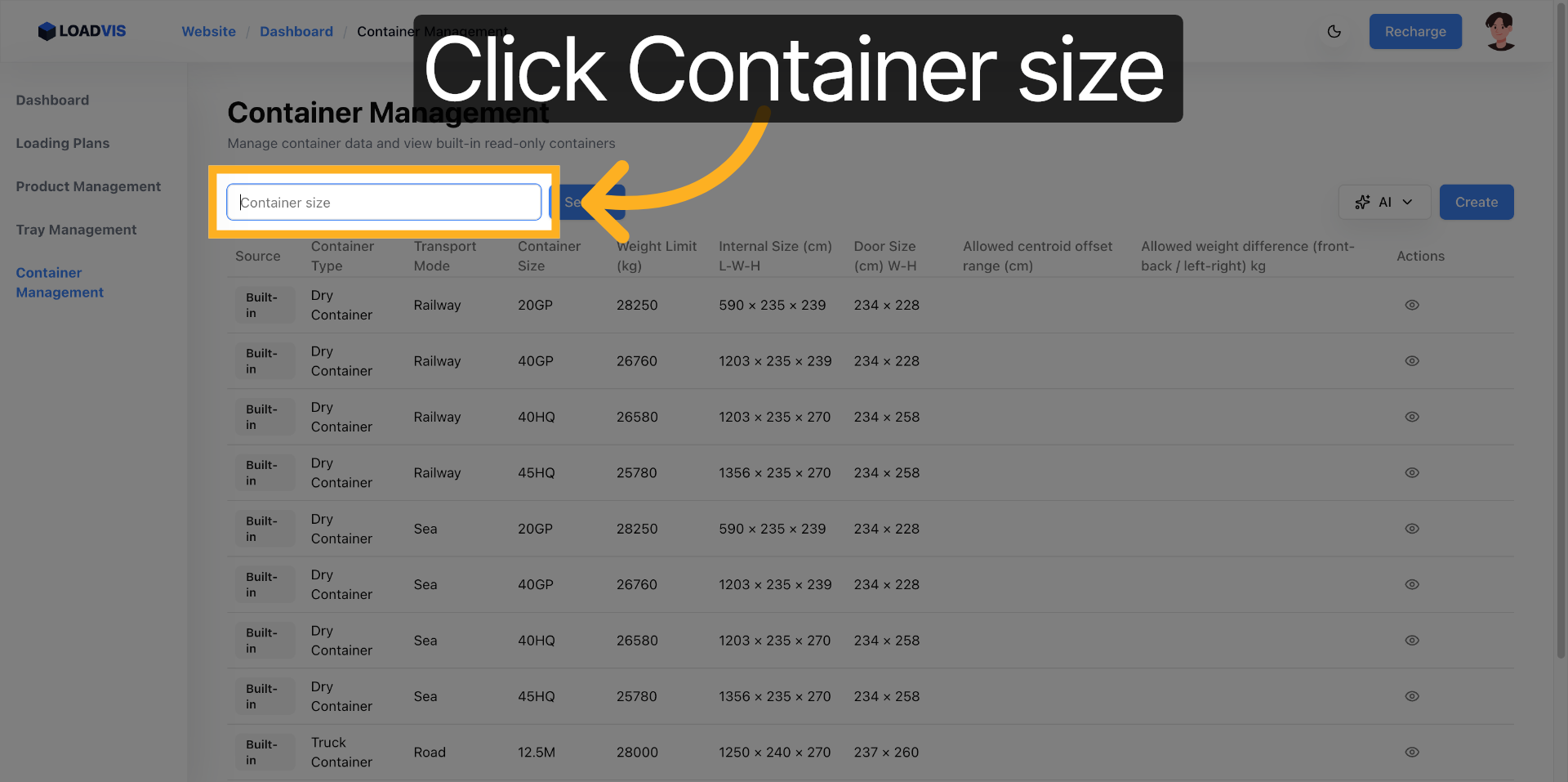 条件を入力し、検索を実行する。
条件を入力し、検索を実行する。
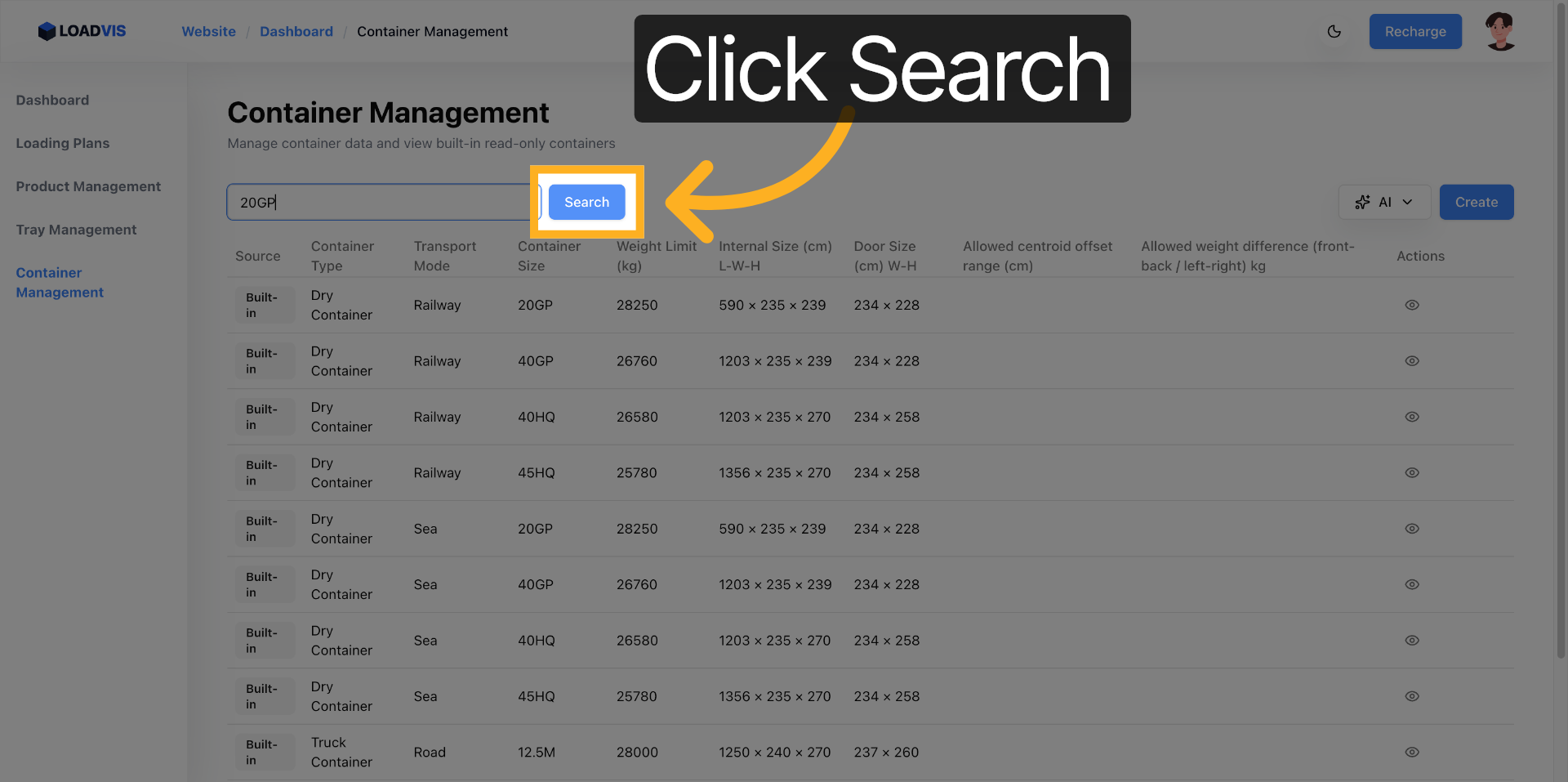 対象を選択して詳細を表示する。
対象を選択して詳細を表示する。
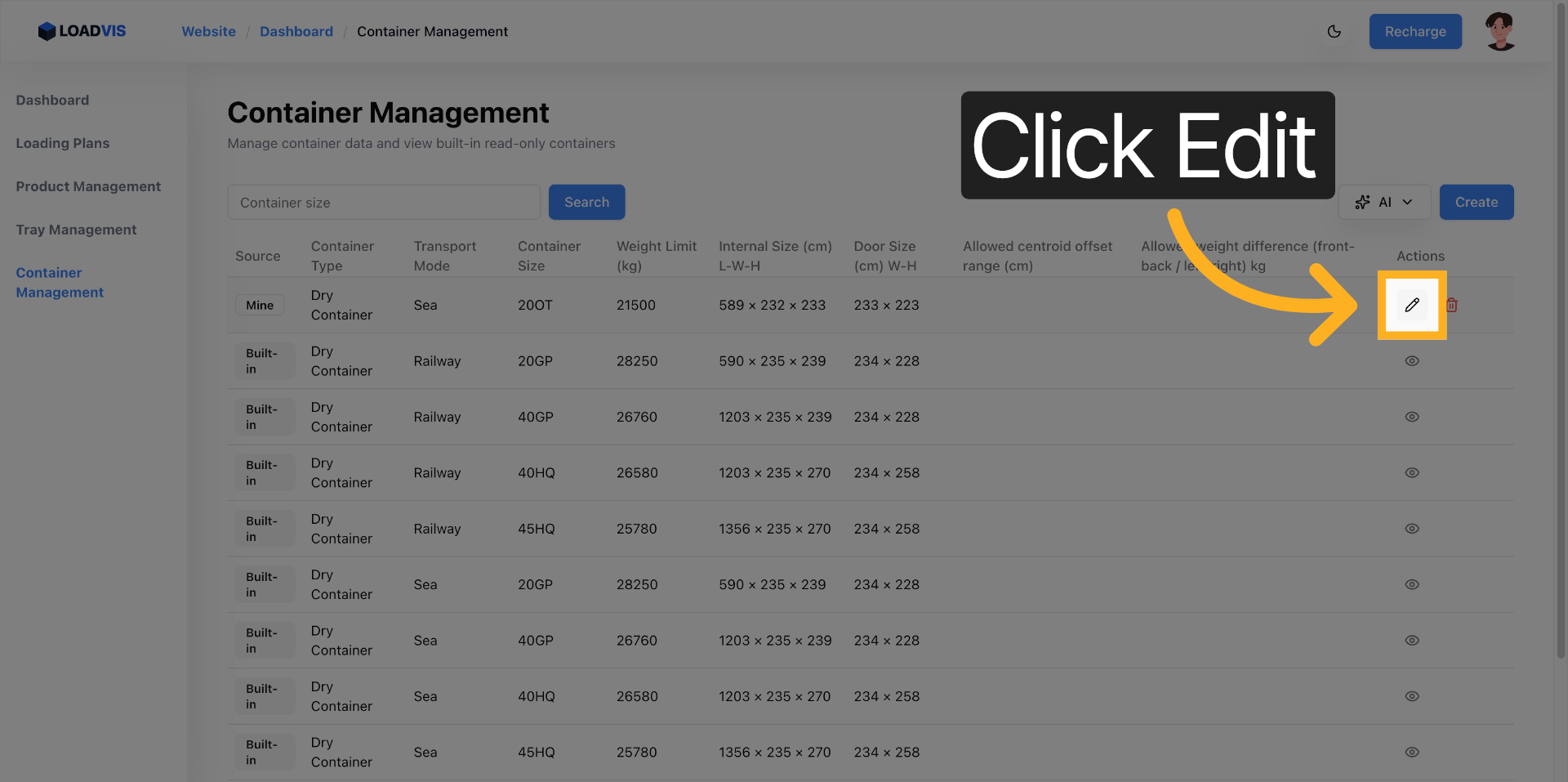
 既存の設定値に疑義が生じた場合、即座に編集モードへ移行できる。
既存の設定値に疑義が生じた場合、即座に編集モードへ移行できる。
編集画面では、積載量フィールドを直接操作する。
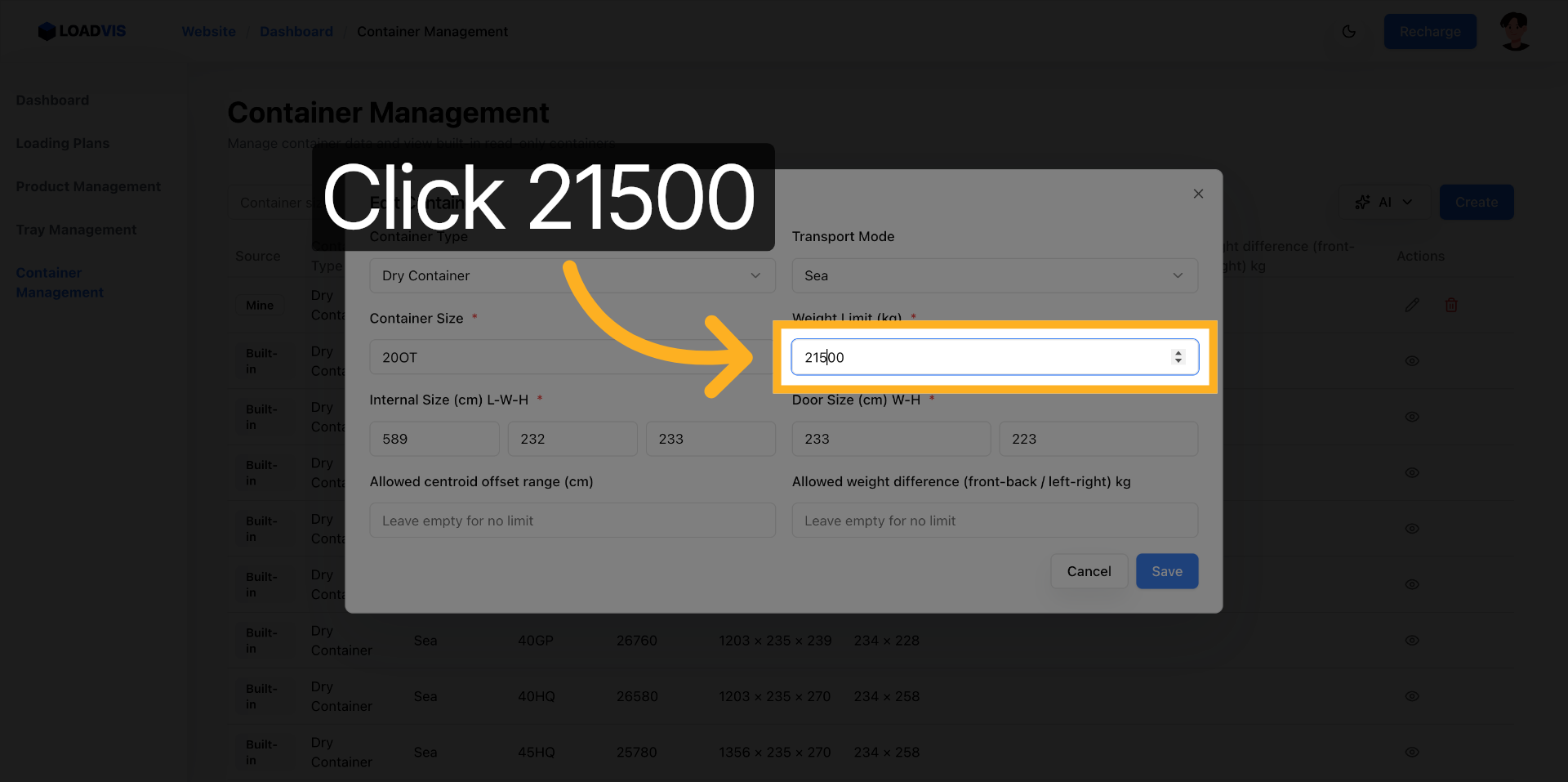 値を更新し、保存する。
値を更新し、保存する。
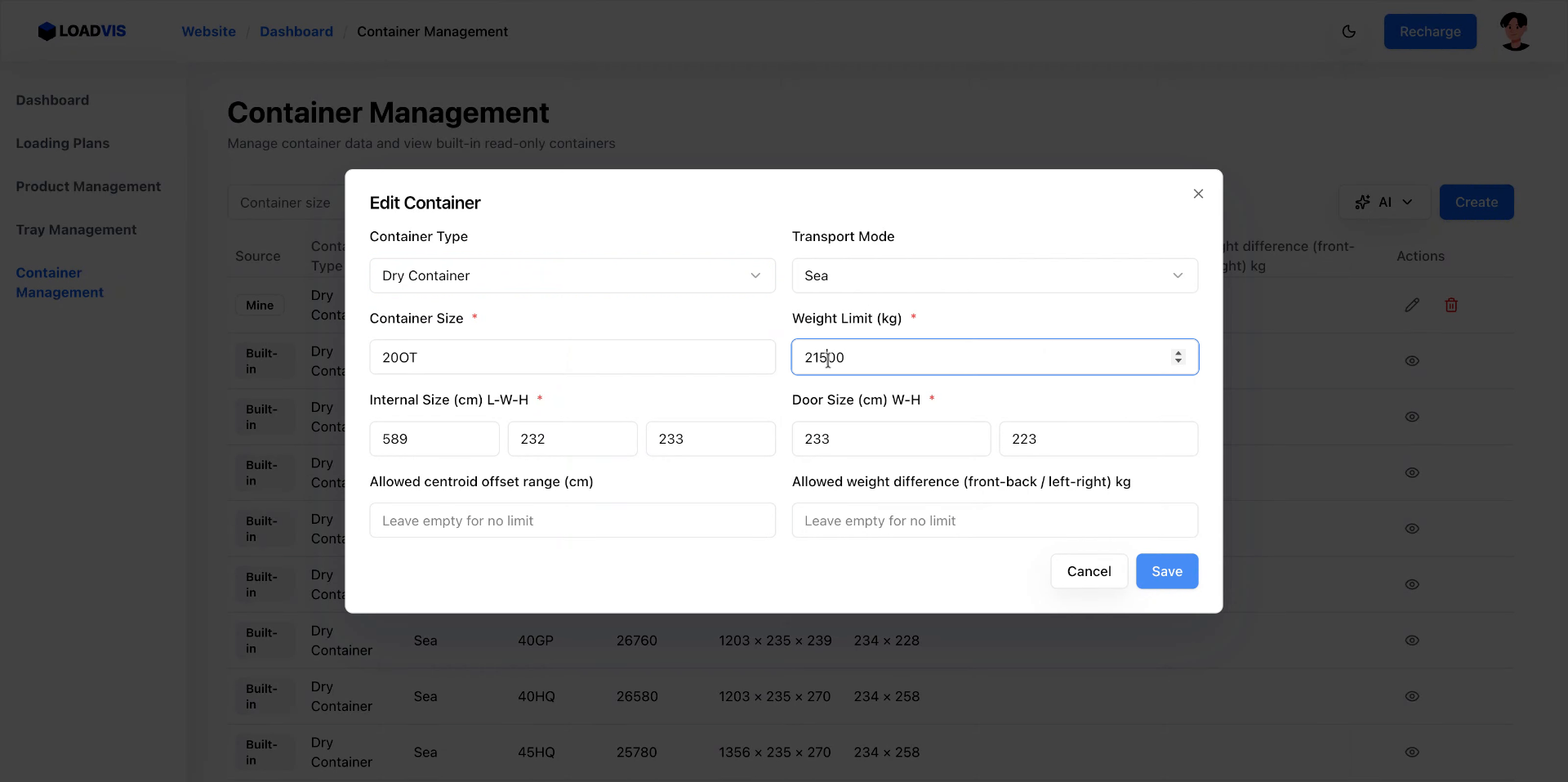
ドア高さ、幅の修正も同様だ。
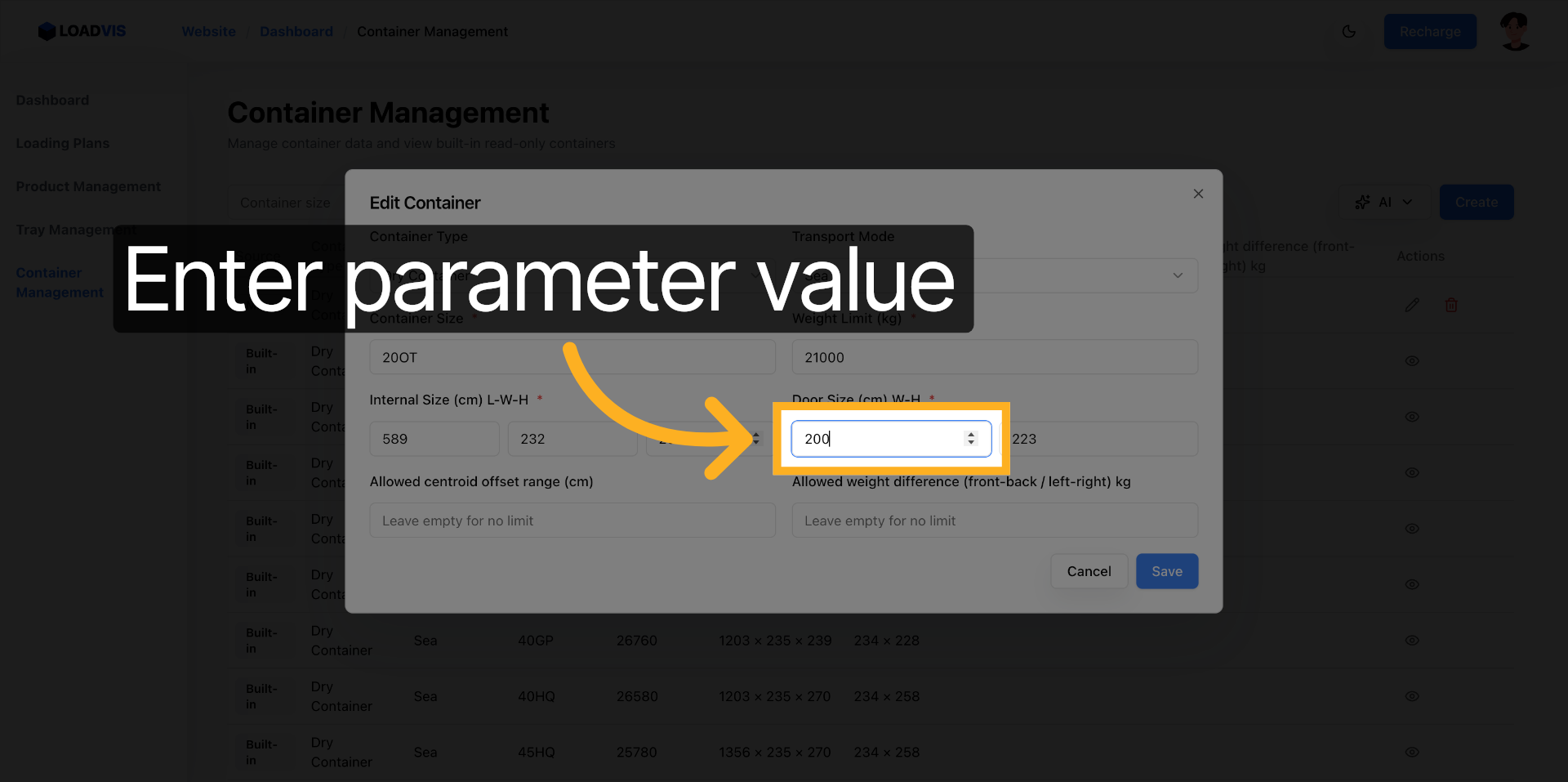 変更は検証を経て反映される。この確認サイクルを省略すれば、アルゴリズムは誤った制約下で最適解を出力し続ける。
変更は検証を経て反映される。この確認サイクルを省略すれば、アルゴリズムは誤った制約下で最適解を出力し続ける。
5. 間違ったアプローチ vs 確実なアプローチ
間違ったアプローチは明快だ。コンテナ型式コードのみを入力し、システムデフォルト値を信用して検証を省略する。ドア寸法や重量分布ルールを計算条件から除外する。AI抽出結果を無検証で保存する。これらは、計算リソースを無駄に消費するだけで、物理的現実を無視する。
確実なアプローチは逆のベクトルを取る。キャリア仕様書または実測値に基づき、ドア開口寸法・積載上限・重心偏差許容値・重量差閾値を個別パラメータとして定義する。AI抽出結果は必ず仕様書と照合する。計算設定では「入口制限チェック」「偏重警告」「グループ制約」を有効化する。保存前に必須項目の検証を完了させる。確実性は、速度の対極にある。検証レイヤーを厚くすることが、唯一の確実なアプローチだ。
6. ツール支援範囲と手動確認範囲の定義
AI解析や非同期ソルバーの能力には明確な境界がある。ツールは、非構造化テキストからのパラメータ抽出、制約付きの配置計算、3D可視化による衝突予測、および形式統一までを支援する。一方で、旧型コンテナの仕様改変、現地フォークリフトのマスト有効高さ、道路規制による軸重制限、荷主指定の積み下し順序、床材の耐荷重特性などはツール外である。これらは文脈依存の物理・法規制だ。
パラメータ設定時の実測値適用と、現場固有の制約の反映は、担当者の手動確認とドメイン知識に依存する。AIは初期ドラフト生成と形式変換の補助に過ぎない。境界条件の最終承認は、必ず人力が担保しなければならない。いつエラーが発生するかを予測するには、ツールの出力を絶対視せず、常に現場の物理法則と照合する視点を維持する必要がある。レコードの削除操作ですら、誤データが計画全体の整合性を損なうため、二段階の確認プロセスが組み込まれている。
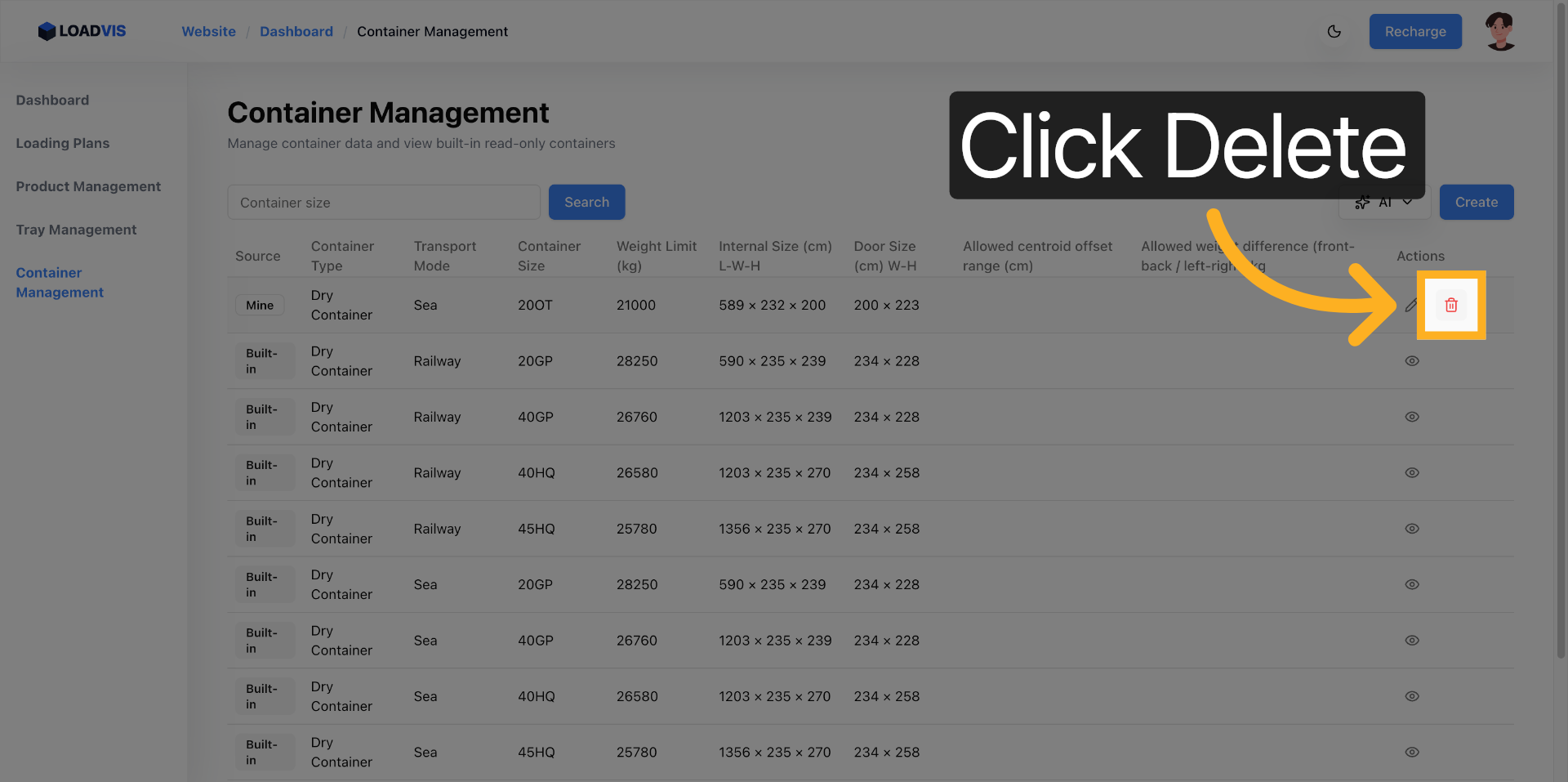
不要なエントリーを整理することも、データの純度を保つ手動判断の一部だ。
7. 結び
積載計画は空間計算ではない。実行可能性の設計図である。アルゴリズムの出力精度は、入力される境界条件の現実適合度に比例する。容積最適化を追求する前に、ドア寸法・重量分布・重心偏差といった物理的制約をデータとして正確に刻む検証プロセスをワークフローに組み込む必要がある。計画の信頼性は、計算速度や自動抽出の利便性では決まらない。制約定義の厳密性と、現場適合性の検証深度で決まる。物理の法則は、アルゴリズムの幻想に屈しない。