理論値と現場の乖離:入口制約と重量偏重による積載計画失敗の検証シナリオ
テーブル上の容積率が98%に達していても、ドロープダウンで計画が凍結する瞬間を、何度目撃したことか。アルゴリズムが弾き出した最適解は、往々にして物理法則を無視した紙上の幻影に過ぎない。現場執行を不可能にする失敗パターンは、構造上以下の三つに明確に収斂する。第一に、理論体積は達成可能だが、フォークリフトのアプローチ軌道やコンテナ内部の剛体干渉により搬入自体が物理的に阻害されるケース。第二に、入口寸法やドアクリアランスの硬性制約が未設定のまま、貨物列が隘路で詰まり、作業が半端な状態で膠着するケース。第三に、単位体積あたりの重量密度が不均等になり、車両の軸重バランスが法定限界を逸脱し、走行中にサスペンションが非対称応力で劣化する輸送リスクケース。これらを業務上の失敗パターンとして最初から分離しない限り、いくら計算リソースを投入しても意味がない。計画は計算ではない。実行である。
過小評価されがちな物理的乖離
なぜ現場担当は容積率という単一指標に過剰に固執するのか。それは数字の美しさが、物理的な摩擦係数や床耐荷重の非線形な挙動を隠蔽するからに他ならない。最適化エンジンは与えられたパラメータを絶対視する。しかし現実のマスタデータは、常に劣化する。実測のフォークリフト旋回半径はカタログ値より15cm大きい場合がある。ドアの実開寸法はヒンジの摩耗やシール膨張で数ミリアウトする。床の点支持耐荷重はパレットの接地面積がわずかにずれるだけで局所的に破綻する。これらの乖離を「現場の仕方が悪い」と切り捨てている時点で、計画の信頼性はゼロに落ちる。数値は嘘をつかない。ただし、前提条件が欠落している数値は最も残忍な嘘になる。
検証フローの実装手順:数式から現場への橋渡し
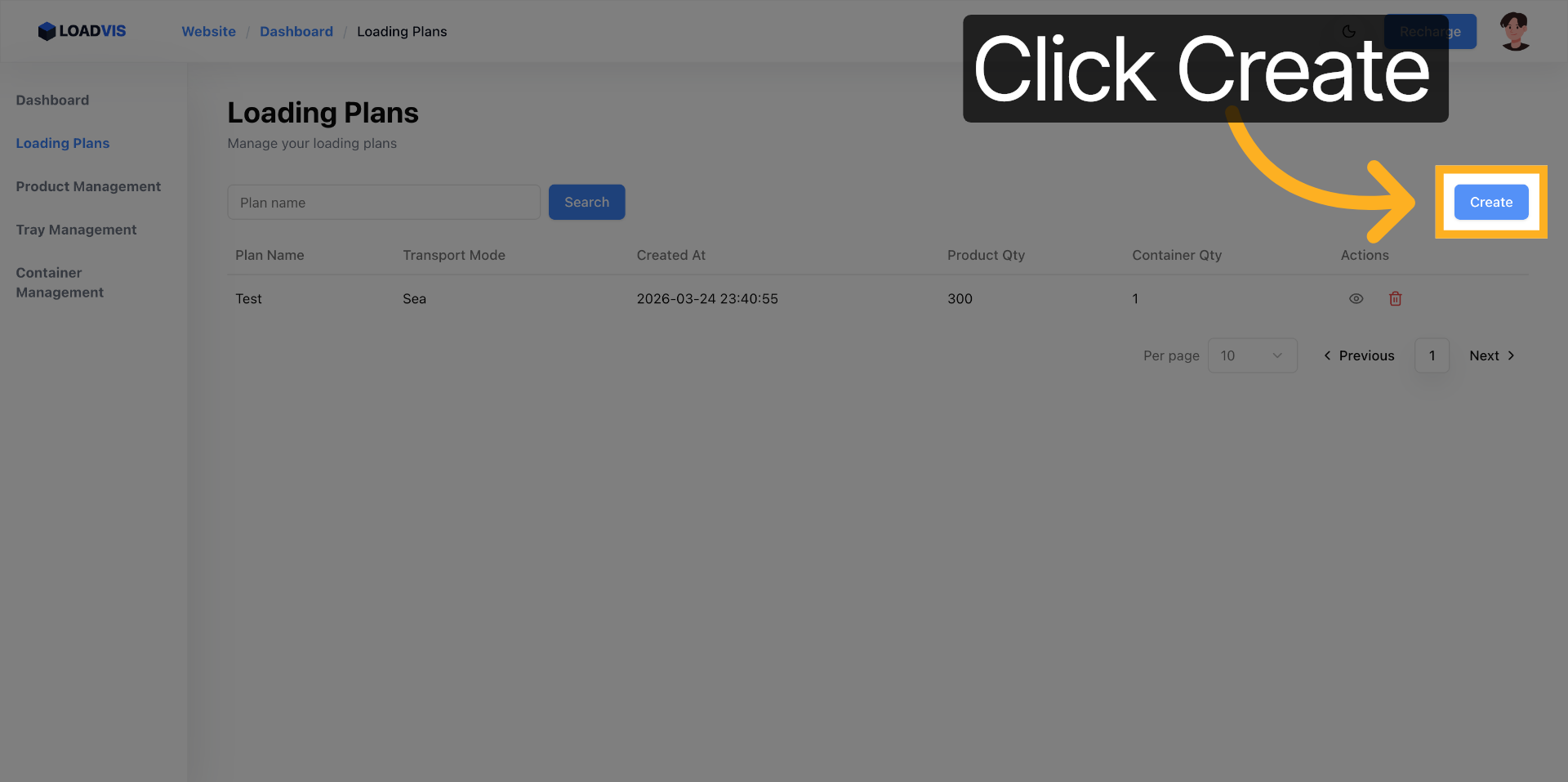
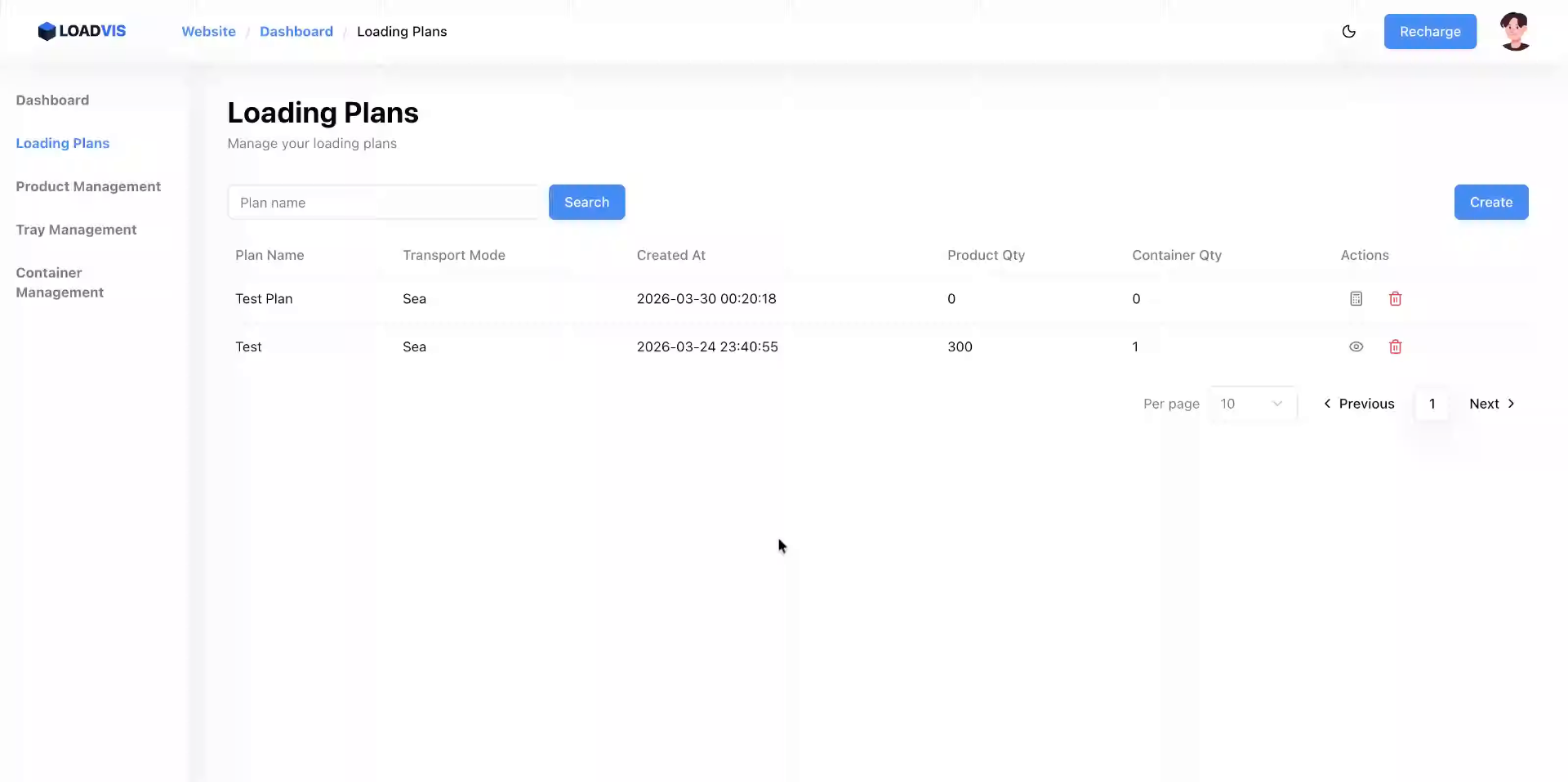
計画の物理的実効性を担保するには、計算実行前の容器設定フェーズでドア寸法、耐荷重分布、重心偏差許容値を明示的に定義する必要がある。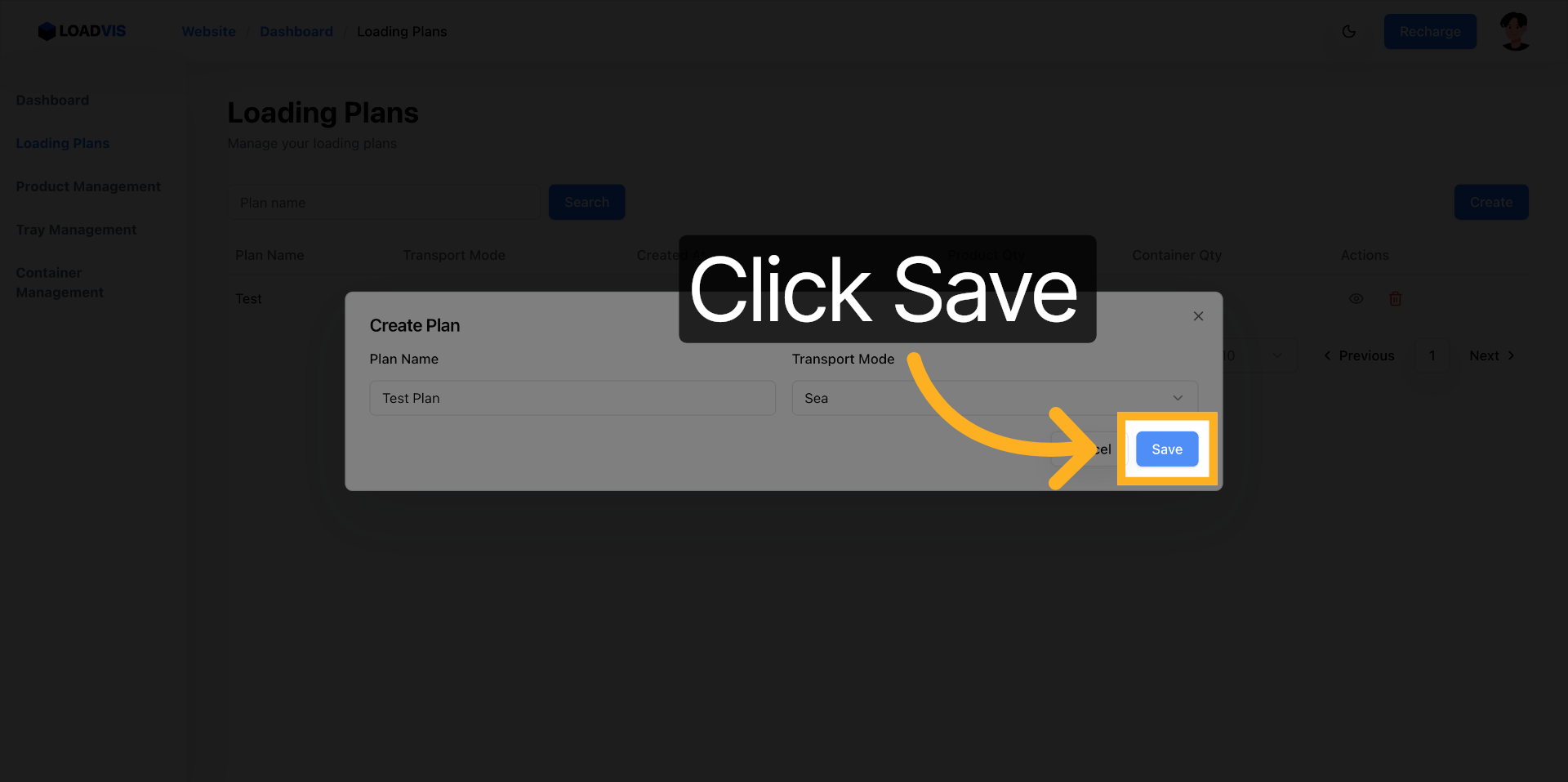 。数値の境界を曖昧にしたまま最適化ボタンを叩けば、システムは容認不可能な解を平然と出力する。計算完了後、最初に展開すべきは「未積載」パネルだ。496件もの貨物がリストアップされたとき、それは単なる残数ではない。制約違反の直接的な証言である。
。数値の境界を曖昧にしたまま最適化ボタンを叩けば、システムは容認不可能な解を平然と出力する。計算完了後、最初に展開すべきは「未積載」パネルだ。496件もの貨物がリストアップされたとき、それは単なる残数ではない。制約違反の直接的な証言である。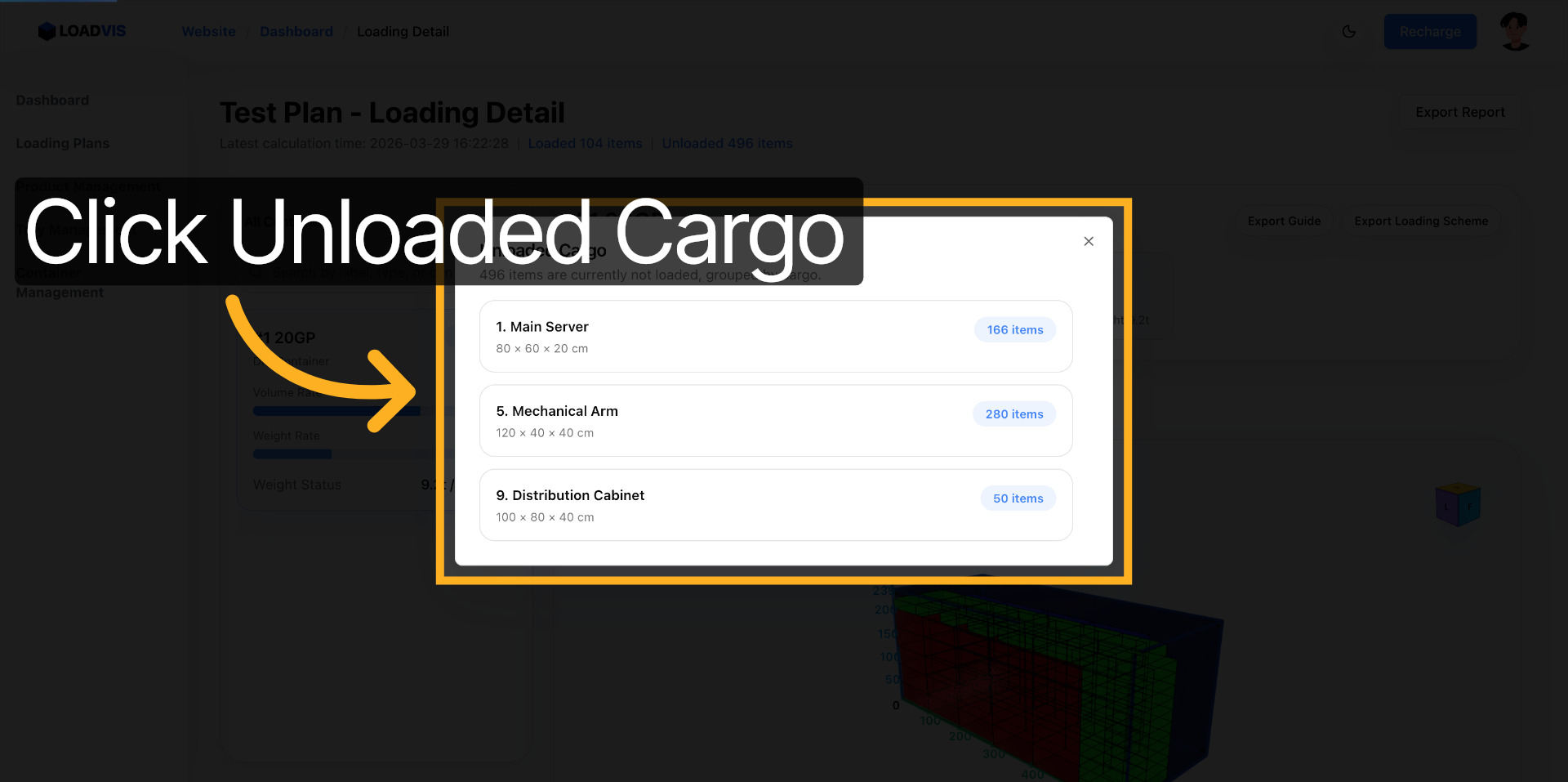 。各グループの制約原因を特定しない限り、パラメータ調整は闇雲な試行錯誤に終わる。
。各グループの制約原因を特定しない限り、パラメータ調整は闇雲な試行錯誤に終わる。
結果検証では、3Dビューの多角回転操作による物理干渉の目視確認が必須となる。画面をドラッグして斜め上方から観察すれば、理論上は収容可能でもフォークリフトのフォーク挿入空間が干渉している死角が浮かび上がる。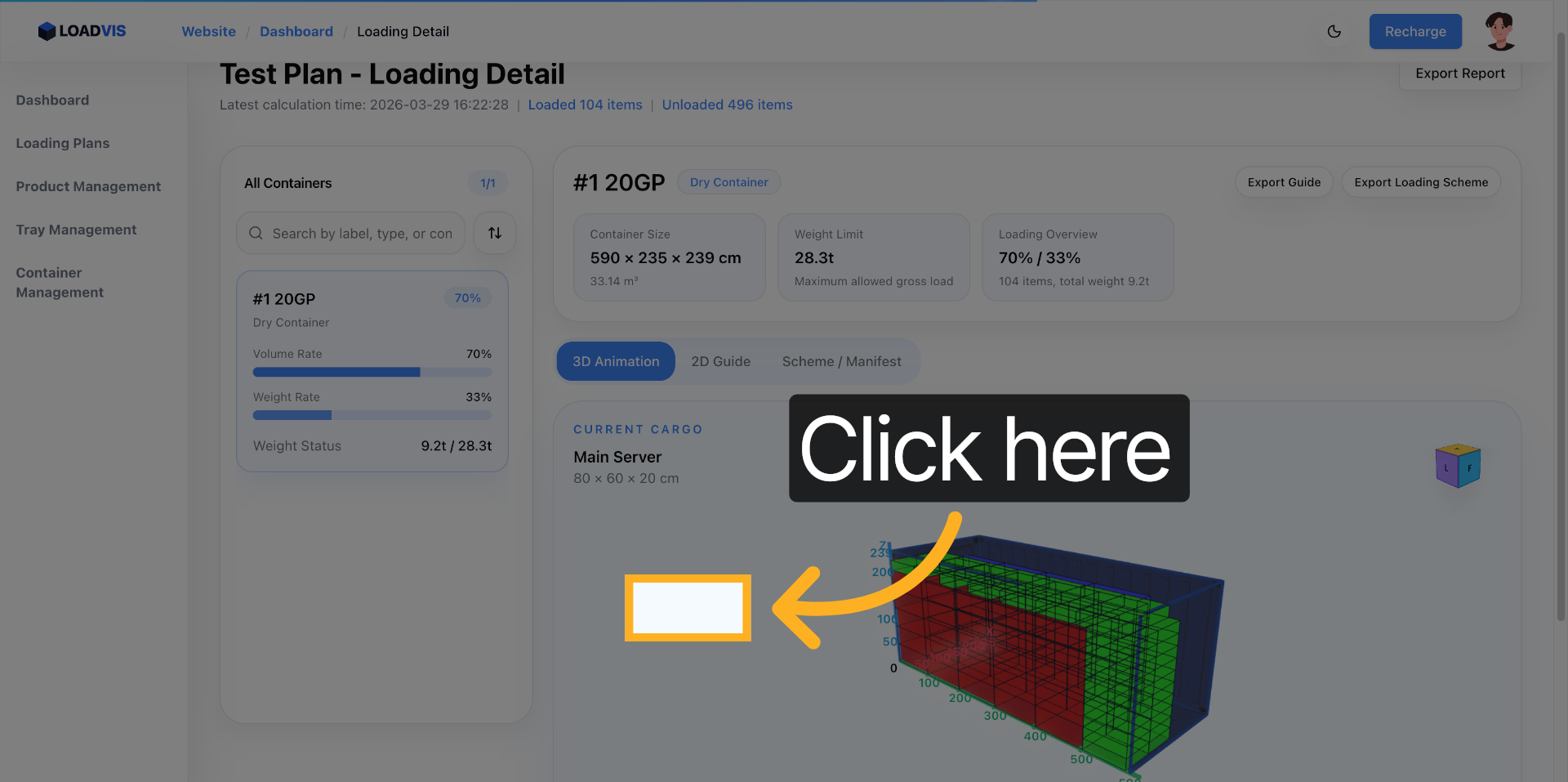 。さらに2Dガイドへ切り替え、上面図と側面図で断面配置を平面検証する。
。さらに2Dガイドへ切り替え、上面図と側面図で断面配置を平面検証する。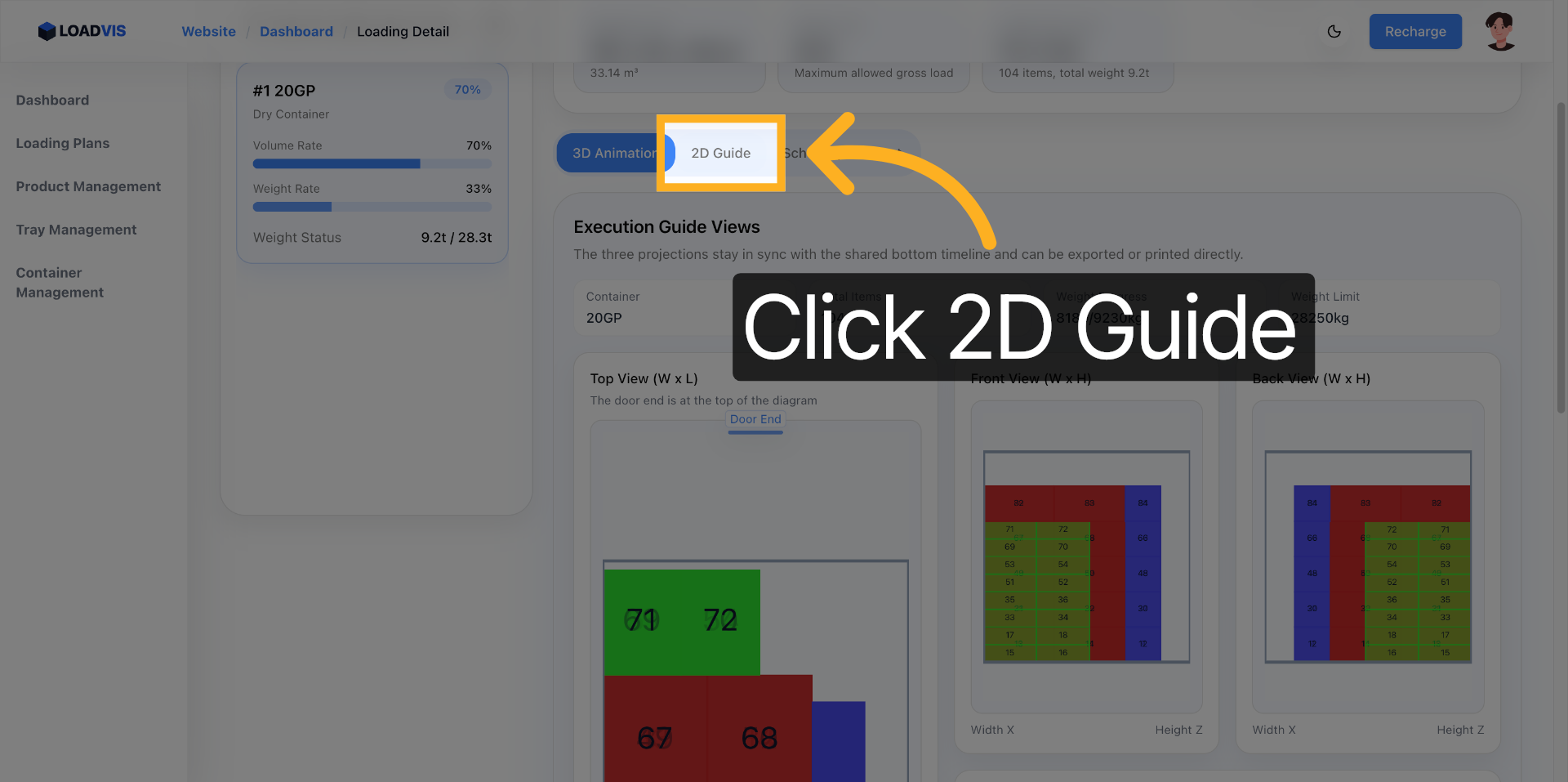 。スキームやマニフェストの単位重量×数量とコンテナ軸重をクロスチェックする工程をスキップしてはならない。
。スキームやマニフェストの単位重量×数量とコンテナ軸重をクロスチェックする工程をスキップしてはならない。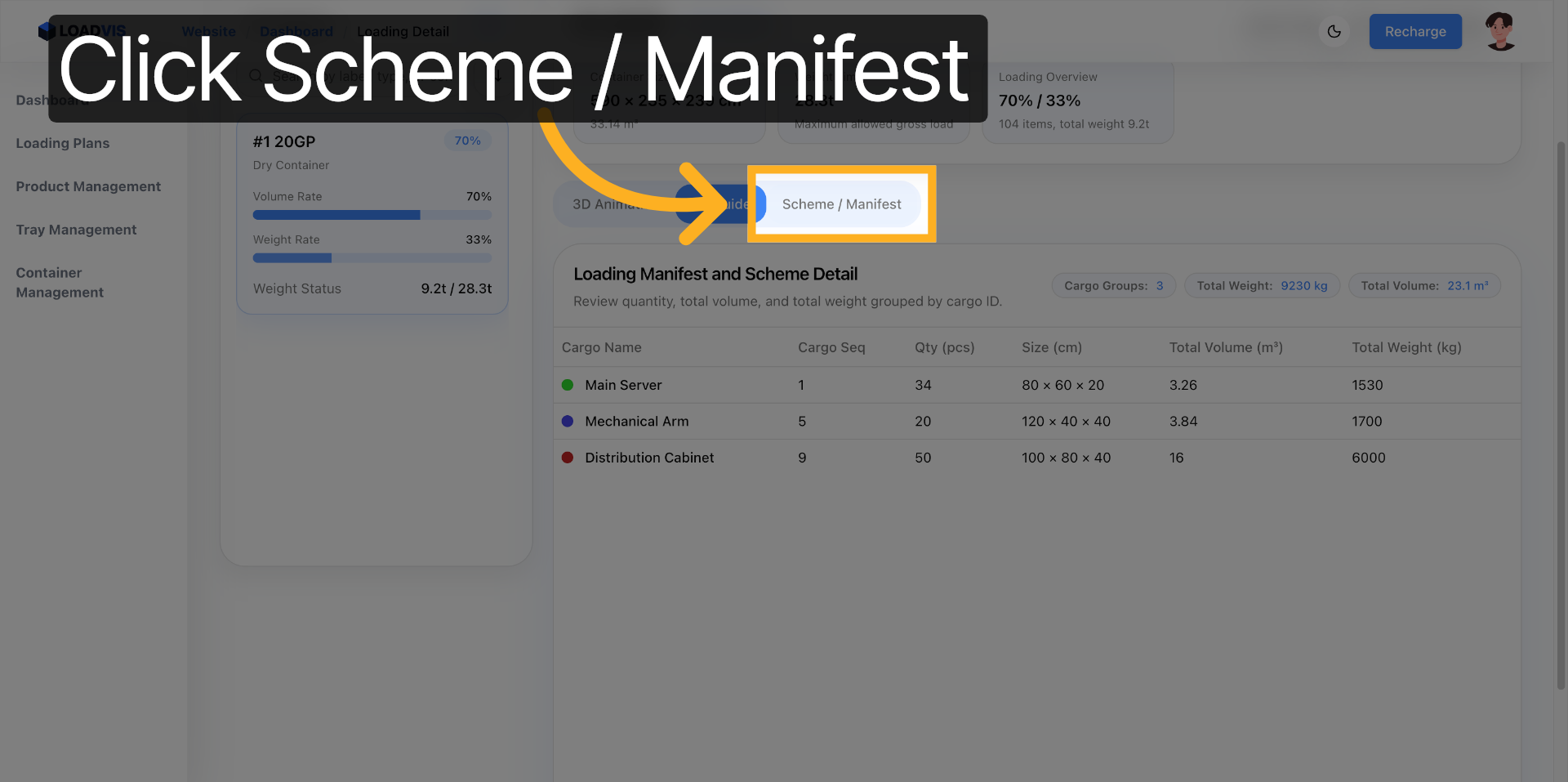 。これらの操作が「数式上の最適」から「現場での実行可能域」への変換に不可欠な理由は、アルゴリズムが空間的パッキング成功率は計算できても、作業員の身体性や突発的な包装膨潤まではシミュレートできないためだ。手動による境界検証こそが、理論と現実のギャップを埋める唯一の埋め込み材となる。
。これらの操作が「数式上の最適」から「現場での実行可能域」への変換に不可欠な理由は、アルゴリズムが空間的パッキング成功率は計算できても、作業員の身体性や突発的な包装膨潤まではシミュレートできないためだ。手動による境界検証こそが、理論と現実のギャップを埋める唯一の埋め込み材となる。
間接的アプローチと確実的アプローチの比較
間違ったアプローチの典型は、体積計算のみを信仰の対象とし、入口制約パラメータを未設定のまま3D/2D検証をスキップすることだ。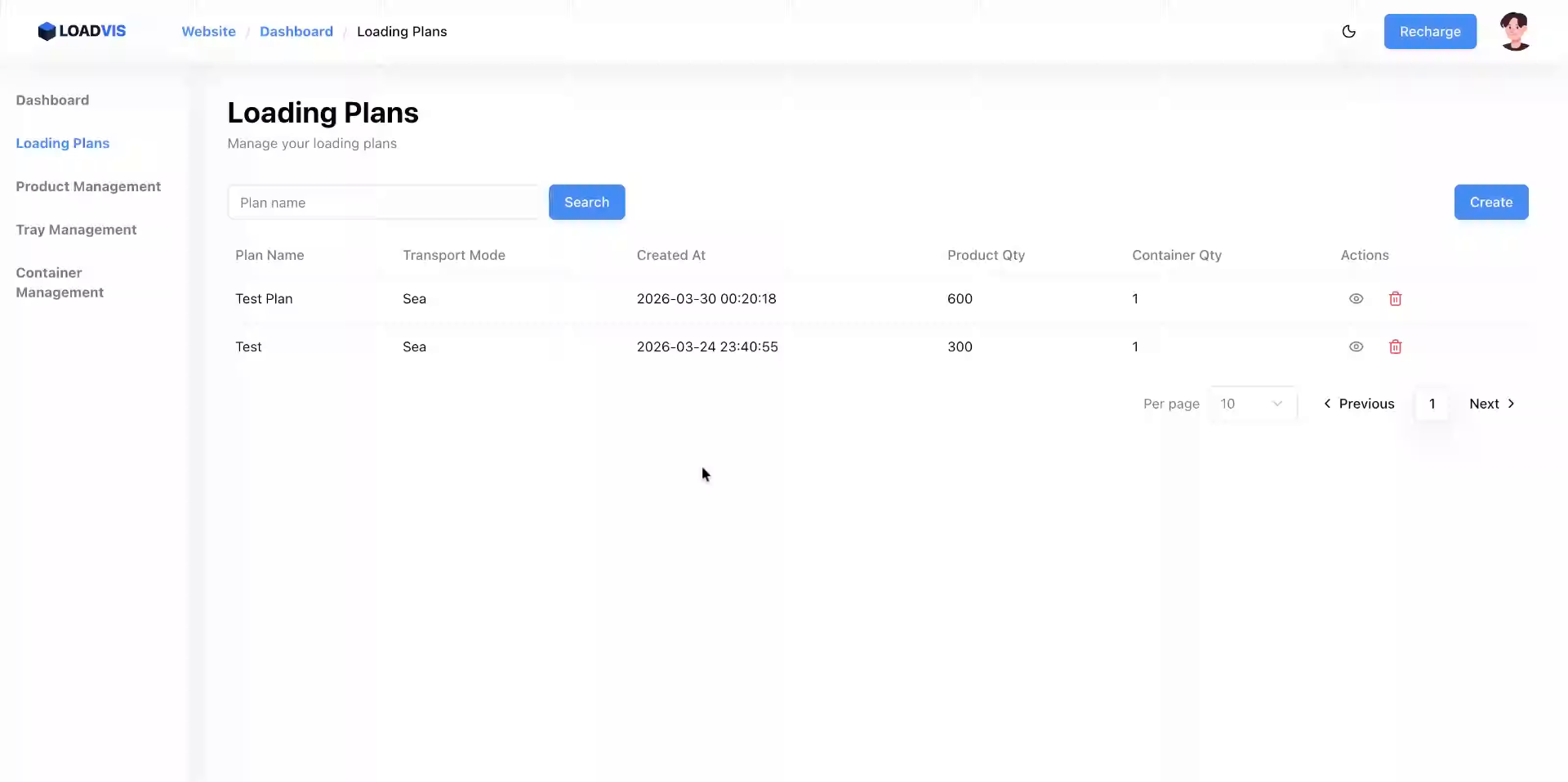 。重量分布の検証を現場着荷後に回せば、トラックのサスペンションは既に非対称応力で歪んでいる。データの不整合を事後処理で補填しようとする癖が、積み下ろし作業の遅延を構造化する。
。重量分布の検証を現場着荷後に回せば、トラックのサスペンションは既に非対称応力で歪んでいる。データの不整合を事後処理で補填しようとする癖が、積み下ろし作業の遅延を構造化する。
確実に実行可能なアプローチは、制約条件の事前定義から始まる。未積載リストの根本原因を製品仕様や梱包単位の不一致にまで掘り下げ、多視点(3D立体+2D断面+明細クロスチェック)の交差検証を経て、重量偏差の許容閾値内へ手動調整を施す。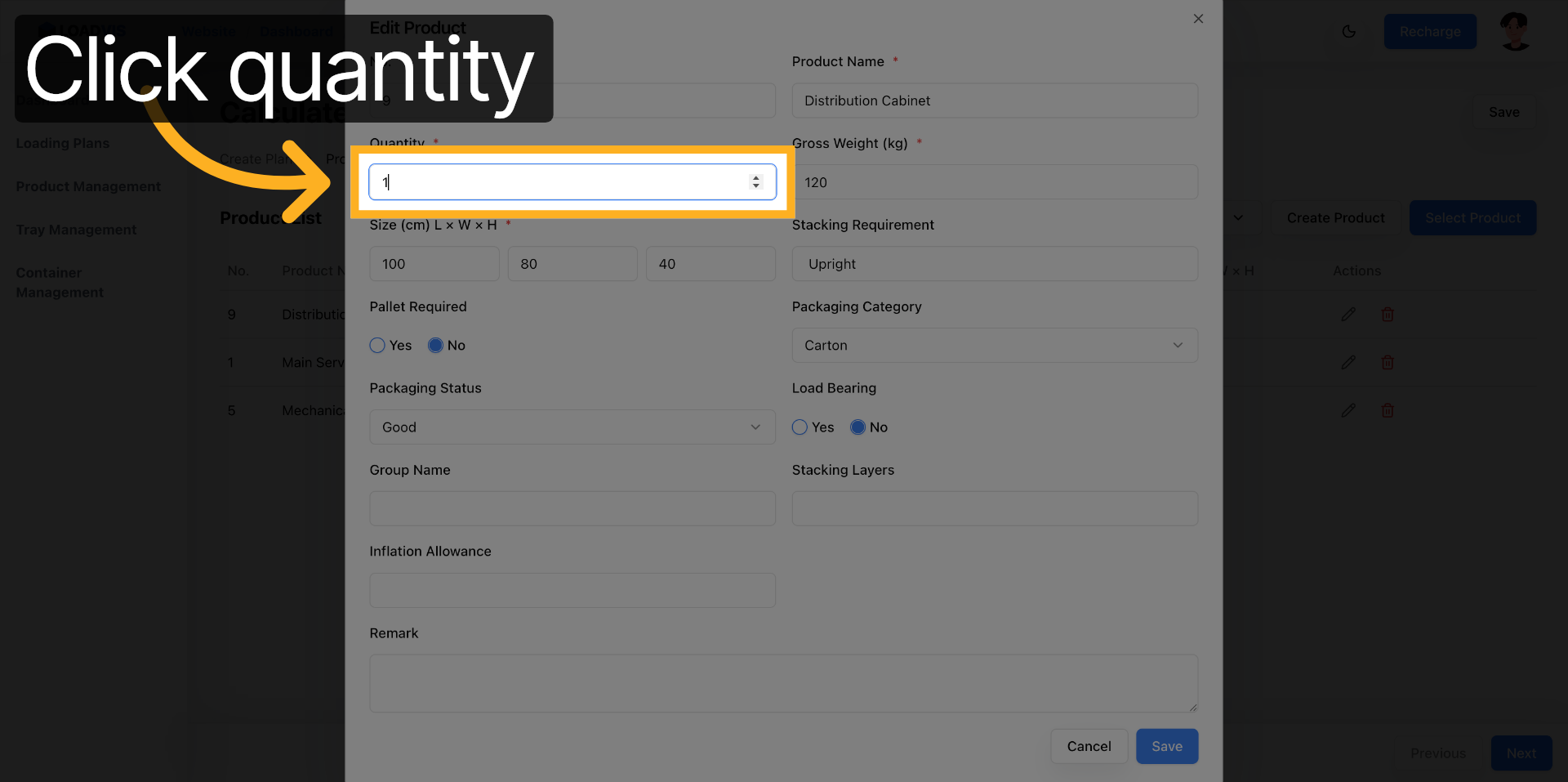 。なぜ後者だけが成立するのか。前者が確率論的パッキングに依存するのに対し、後者が物理的限界値をハードリミットとしてシステムに焼き付けるからだ。数値入力画面で数量を100、200、300と段階的に定義する行為自体が、計算負荷の制御と検証スコープの明確化を意味する。
。なぜ後者だけが成立するのか。前者が確率論的パッキングに依存するのに対し、後者が物理的限界値をハードリミットとしてシステムに焼き付けるからだ。数値入力画面で数量を100、200、300と段階的に定義する行為自体が、計算負荷の制御と検証スコープの明確化を意味する。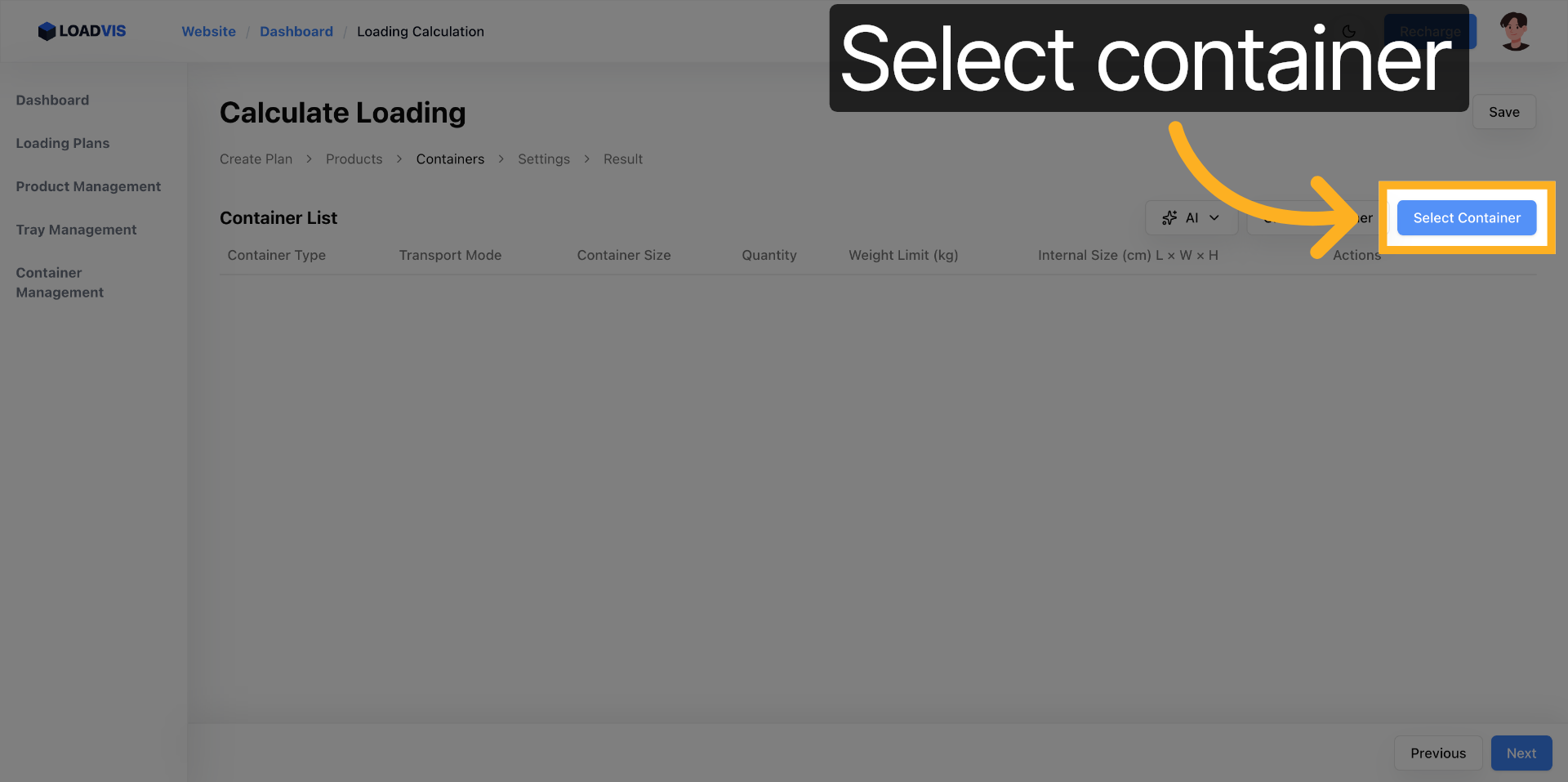 。計算ボタンを押す前の一手間が、現場の混乱を防ぐ防火壁となる。
。計算ボタンを押す前の一手間が、現場の混乱を防ぐ防火壁となる。
ツールの境界線と人力介入の必須領域
ツールが支援する範囲は明確だ。組み合わせ最適化探索、理論重心偏差の自動算出、積載順序の可視化、容積・重量率の一括出力、そして制約違反のフラグ表示。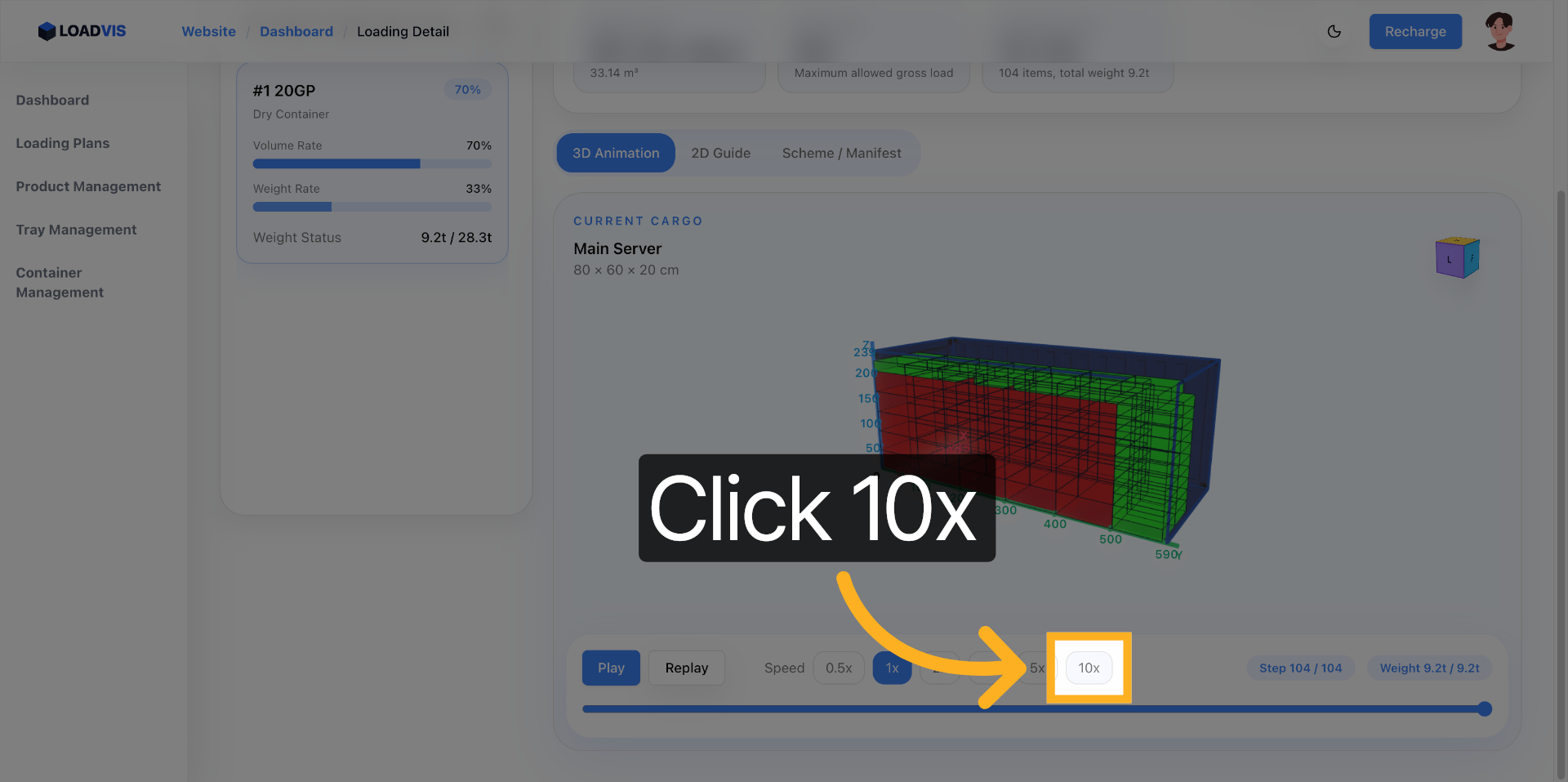 。これらの機能は、計算空間を削減する補助輪に過ぎない。一方、手動確認が必須な領域は、現場の実測寸法誤差(通常±5〜10mm)、作業員の積み付け技量のばらつき、包装材の物理的変形やスリップ係数、輸送区間ごとの法令軸重制限、そして緊急時の積み下ろし順序の現実性である。アルゴリズムは滑らかな剛体を仮定して最適解を導出するが、段ボールは湿気で撓み、パレットは歪む。
。これらの機能は、計算空間を削減する補助輪に過ぎない。一方、手動確認が必須な領域は、現場の実測寸法誤差(通常±5〜10mm)、作業員の積み付け技量のばらつき、包装材の物理的変形やスリップ係数、輸送区間ごとの法令軸重制限、そして緊急時の積み下ろし順序の現実性である。アルゴリズムは滑らかな剛体を仮定して最適解を導出するが、段ボールは湿気で撓み、パレットは歪む。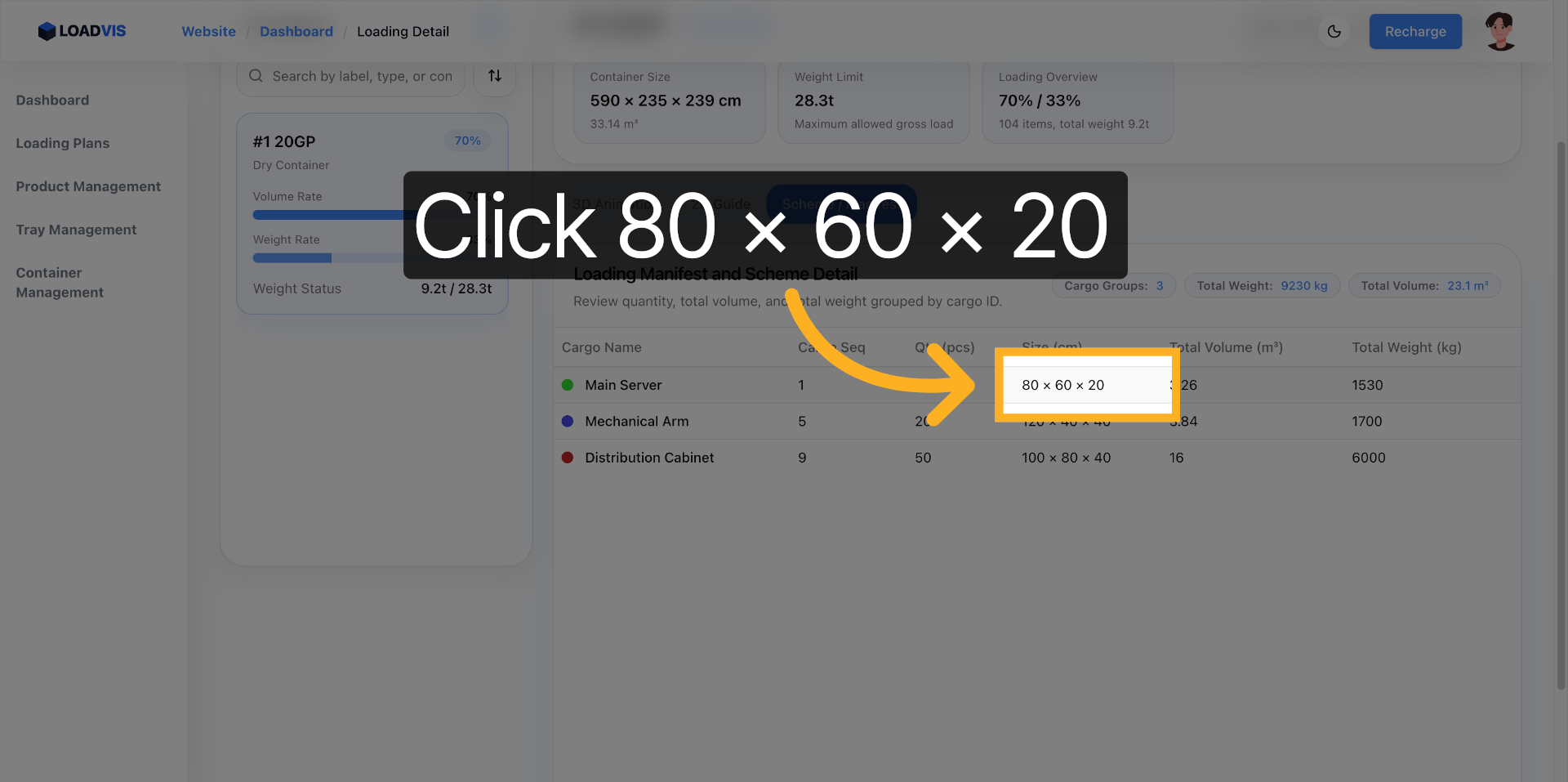 。ツールの出力をそのまま作業指示書に焼き直す愚を犯すな。それはシステムの誤用であり、責任の放棄である。計算速度が向上しても、物理法則は加速しない。ツールはあくまで「候補の提示機」であり、「実行の保証書」ではない。
。ツールの出力をそのまま作業指示書に焼き直す愚を犯すな。それはシステムの誤用であり、責任の放棄である。計算速度が向上しても、物理法則は加速しない。ツールはあくまで「候補の提示機」であり、「実行の保証書」ではない。
運用収束点と閾値管理
運用の収束点は、閾値の管理とデータの継続的整備にある。重心偏差は5%未満を維持せよ。ドアクリアランスは作業員の視認性とフォーク操作を考慮し、最低15cm以上のマージンを確保する。 。容積率が高止まりする計画ほど危険である。物理的余裕を欠いた95%越えのプランは、積載作業の停滞を招き、結果として人時単価を暴騰させる。85%以下の実行推奨ラインを設け、異常値が発生した場合は即座に手動ブレーキをかける。計画は一度きりの計算ではない。実測データのフィードバックループを回し、マスタの劣化を定期的に是正するプロセスこそが、長期的な実行可能性を担保する。現場の摩擦は消えない。ただし、その摩擦係数を正確にモデルに組み込み、常に境界条件を監視し続けることで、理論と実装の間に横たわる断絶は制御可能になる。データの更新を怠るシステムに、最適化などあり得ない。
。容積率が高止まりする計画ほど危険である。物理的余裕を欠いた95%越えのプランは、積載作業の停滞を招き、結果として人時単価を暴騰させる。85%以下の実行推奨ラインを設け、異常値が発生した場合は即座に手動ブレーキをかける。計画は一度きりの計算ではない。実測データのフィードバックループを回し、マスタの劣化を定期的に是正するプロセスこそが、長期的な実行可能性を担保する。現場の摩擦は消えない。ただし、その摩擦係数を正確にモデルに組み込み、常に境界条件を監視し続けることで、理論と実装の間に横たわる断絶は制御可能になる。データの更新を怠るシステムに、最適化などあり得ない。