체적률 95%였지만, 출고 문턱에서 막힌 화물: 시뮬레이션과 현장의 간극을 좁히는 적재 검증 워크플로우
모니터 화면에 체적 활용률이 95%를 찍을 때면 왠지 안도감이 밀려온다. 빈틈없이 메워진 입방체를 바라보면, 출고 준비가 끝났다고 착각하기 마련이다. 그런데 실제 야드에서 램프가 컨테이너 문턱에 걸리는 순간, 그 숫자는 무용지물이 된다. 왜일까. 총량 최적화만 쫓는 파이프라인은 3차원 공간의 물리적 제약과 적재 순서의 인과 관계를 간과하는 구조적 맹점을 안고 있다. 포크리프트가 진입할 통로가 막혔다. 뒷축 하중이 한쪽으로 쏠렸다. 도어 간섭을 피한 장치가 결국 바닥에 깔린 무거운 팔레트를 건드릴 수 없게 만들었다. 계산 완료는 실행 가능이 아니다. 이 괴리를 메우려면 뷰어에서 마우스 클릭 몇 번으로 끝나는 게 아니라, 검증의 시선 자체를 뜯어고쳐야 한다.
시뮬레이션이 현장을 배신하는 구조적 이유
휴리스틱 솔버는 본질적으로 경계 상자(Bounding Box) 충돌 회피와 부피 극대화에 최적화되어 있다. 무게중심(CoG)의 미세한 이동이나 적재 순서에 따른 물리적 간섭까지 실시간으로 시뮬레이션하려면, 탐색 공간의 계산 복잡도가 기하급수적으로 치솟는다. 엔진은 그래서 종종 "수학적으로는 최적, 물리적으로는 불가능"한 조합을 뱉어낸다.
언제 오류가 터지는가. 주로 출고 전 마지막 팔레트를 밀어 넣으려 할 때다. 도어 프레임과 화물 사이의 유휴 공간이 5cm도 안 남았거나, 바닥에 깔린 SKUs의 무게가 컨테이너 하부 지지 구조의 허용 하중을 초과했을 때다. 화면상의 퍼센트는 거짓말을 하지 않는다. 다만, 그것이 가리키는 차원이 현장의 차원과 다르다는 사실을 망각하게 만들 뿐이다. 우리는 종종 알고리즘이 내준 답을 설계도라 믿지만, 그것은 어디까지나 가상의 시공 환경이다.
검증 워크플로우: 계산을 실행 가능성으로 전환하는 세 가지 축
제공된 인터페이스를 뜯어보면, 실제 실패를 예방하는 지점은 UI 버튼 그 자체가 아니다. 그 버튼을 누르는 순간 우리가 확인해야 하는 물리적 단면들이 있다. 단순히 클릭 방법을 익히는 것이 아니라, 왜 그 동작이 현장 실패를 선제적으로 차단하는지 구조를 읽어야 한다.
1. 제약 조건의 명시적 설정: 탐색 공간을 물리적으로 재단하다
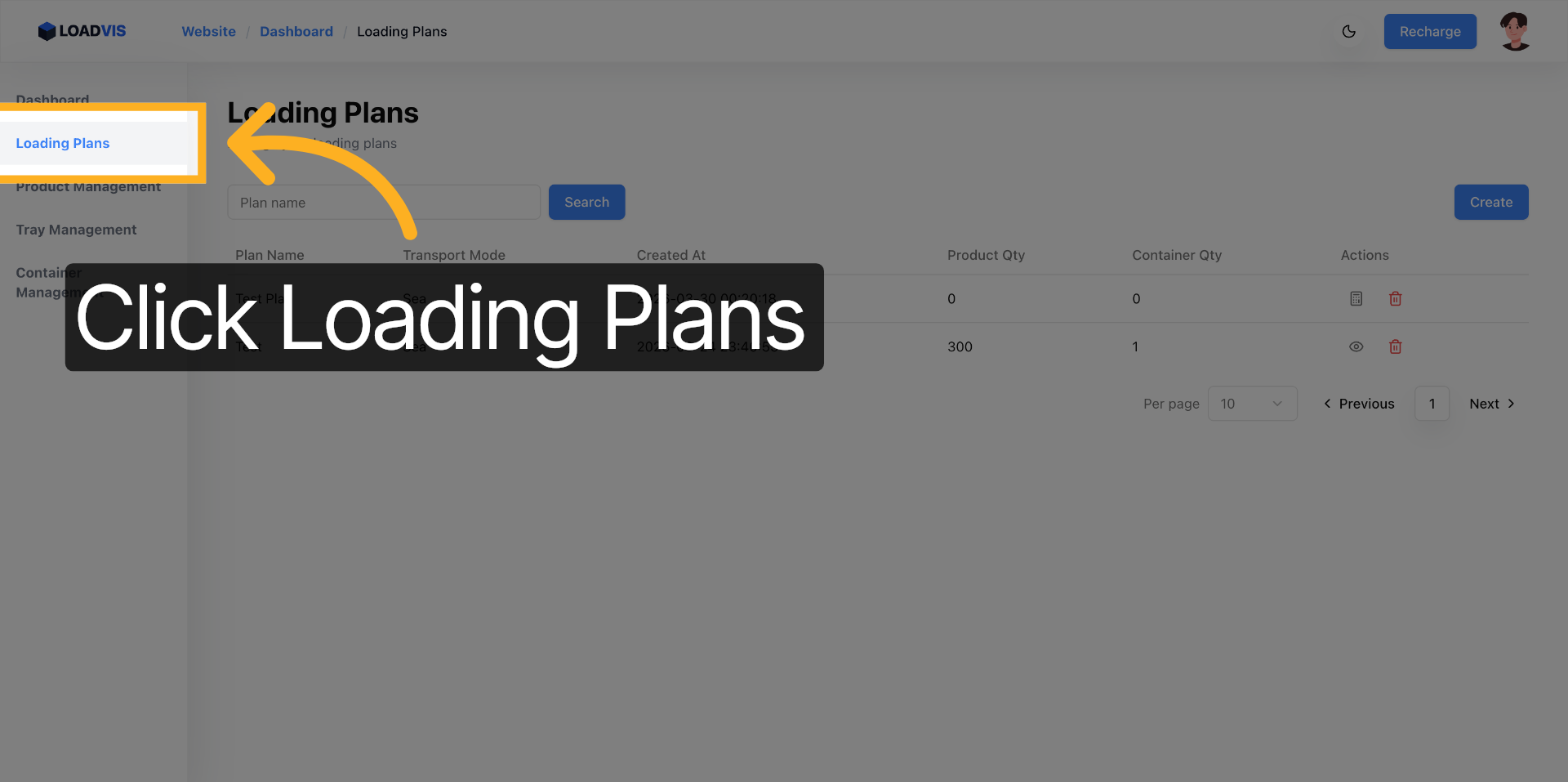
계획을 생성하고 제품을 매핑하는 초기 단계에서 가장 흔히 저지르는 실수는, 시스템 기본값에 모든 것을 맡기는 것이다. 제품 선택과 수량 입력, 컨테이너 바인딩은 데이터 입력일 뿐, 물리적 제약이 아니다. 알고리즘이 넘어야 할 허들은 여기서 정의된다.
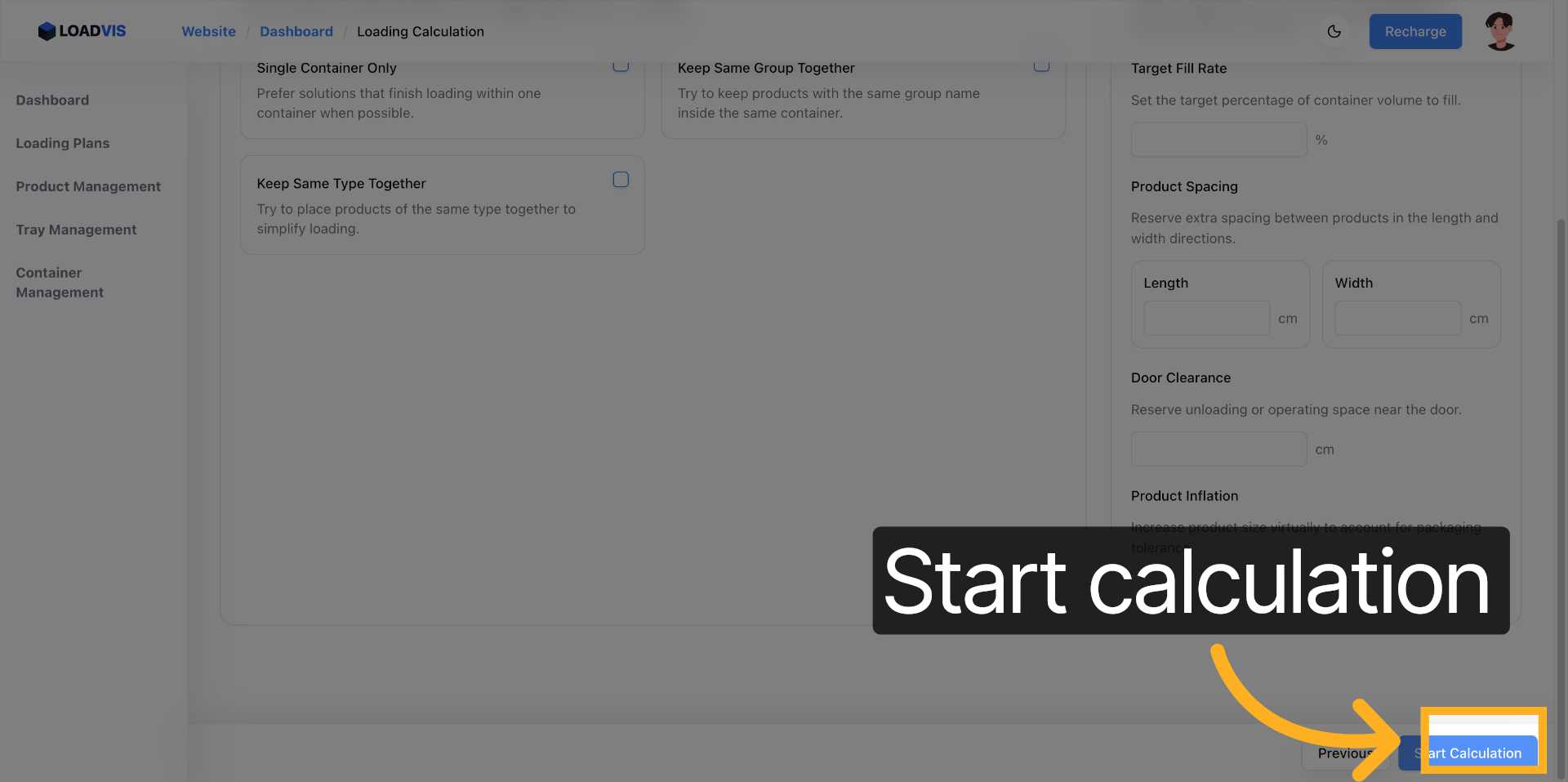
적재 불가 방향, 최대 적층 수, 특정 SKU의 바닥 배치 우선순위 같은 파라미터가 누락되면, 솔버는 포크리프트가 들어갈 수 없는 배치를 생성한다. 입력은 단순한 행위가 아니다. 현장 장비의 한계(포크 너비, 리프트 높이, 도어 경사도)를 숫자와 규칙으로 번역해 엔진의 탐색 경로를 명시적으로 제한하는 작업이다. 이 단계가 생략되면, 이후의 모든 검증은 사후 약방문이 된다.
2. 미적재 목록 읽기: 실패가 아닌 조정 레버로 활용하기
계산이 돌아간 후, 적재됨 104개 항목보다 미적재됨 496개 항목을 클릭하는 것이 훨씬 실용적이다. 많은 이들이 미적재 목록을 단순 오류로 치부하고 다른 컨테이너를 호출한다. 하지만 그것은 알고리즘이 내린 "물리적 양보"의 기록이다.
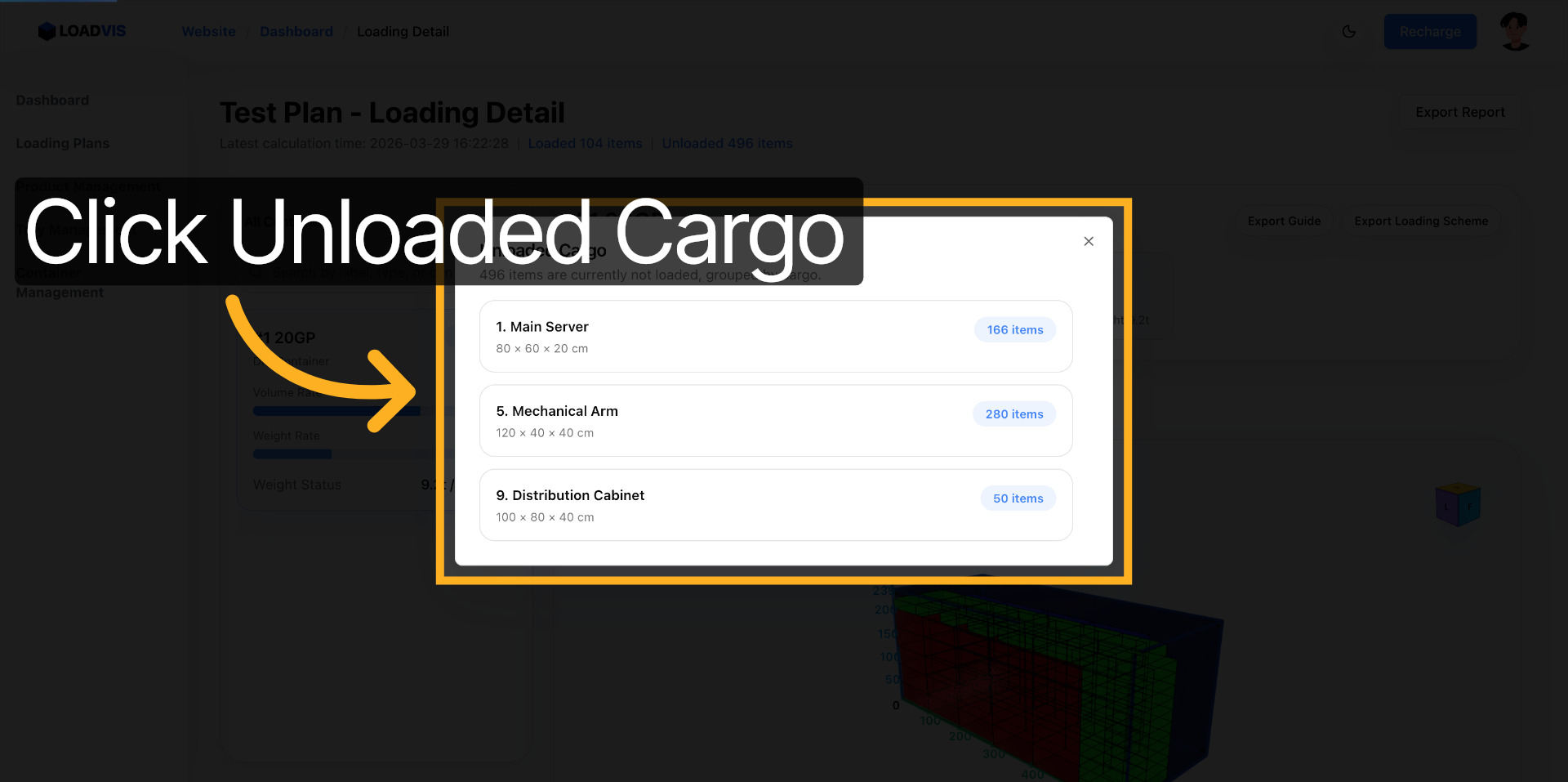
왜 특정 SKU 그룹이 통째로 밀려났는가. 무게 제한 때문인가. 적층 금지 규칙과 부딪혔기 때문인가. 아니면 컨테이너 잔여 공간의 형상이 해당 화물의 최소 회전 각도와 맞지 않아서인가. 미적재 그룹의 원인 분석은 다음 계획에서 제약 조건을 튜닝하거나, 수동으로 적재 우선순위를 재배치해야 할 레버 포인트를 제공한다. 목록은 거절문이 아니라, 파라미터를 보정하라는 신호다.
3. ×10 배속 시퀀스와 2D 평면도의 교차 검증
화면의 3D 뷰어는 정적 이미지가 아니다. 적재 애니메이션을 ×10 배속으로 돌리는 것은 단순한 시간 절약이 아니다.
재생 속도를 높인 채로 팔레트가 컨테이너 도어 방향으로 접근하는 궤적을 추적한다. 중간에 돌출부가 다른 화물을 긁고 지나가는가? 특정 레이어가 완성된 후, 다음 층의 진입 각도가 현장 장비의 승하강 각도와 충돌하지 않는가? 이때 2D 가이드로 시선을 전환해야 하는 이유가 명확해진다.
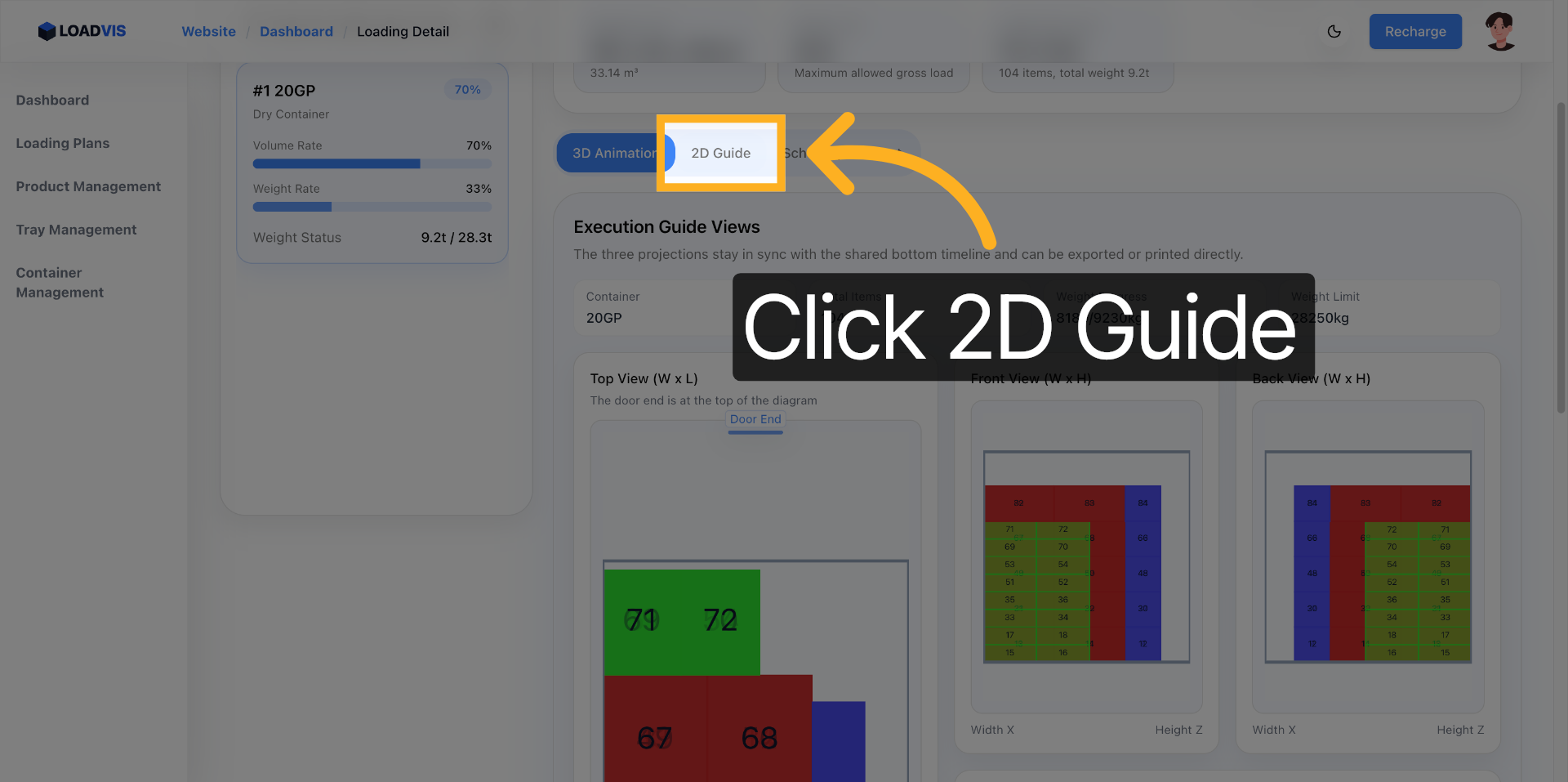
3D는 공간적 겹침을, 2D 탑뷰/사이드뷰는 적재 간격과 도어 오프셋을 직관적으로 보여준다. 2D 뷰의 선형 격자와 3D 뷰의 입체 배열을 오가며 간섭 구역을 크로스체크하는 것, 이것이 시뮬레이션 데이터가 현장 지시로 전환되는 순간이다.
[잘못된 접근] vs [더 확실한 방법]
| 검증 축 | 잘못된 접근 (계산 중심) | 더 확실한 방법 (검증 중심) |
|---|---|---|
| 미적재 대응 | "부피가 부족하니 컨테이너 추가"로 즉각 전환 | 미적재 그룹의 물리적 속성(무게/형상/제약 충돌)을 역추적해 파라미터 재설정 |
| 뷰어 활용 | 결과 스크린샷만 캡처하여 보고용 자료로 보관 | ×10 배속 재생으로 진입/회피 궤적 추적, 2D 평면도와 시퀀스 교차 검증 |
| 제약 설정 | 시스템 기본값을 그대로 통과 | 현장 장비 한계 및 화물 물성(변형/취약점)을 명시적 규칙으로 변환 |
도구의 경계와 반드시 수동으로 검토해야 할 지점
최적화 엔진이 모든 변수를 흡수할 수 있다고 생각하면, 야드에서 다시 한 번 발이 묶인다. 도구는 물리 법칙을 근사적으로 시뮬레이션하지만, 현장의 불규칙성까지 완전히 모델링하지는 못한다. 알고리즘은 컨테이너 바닥의 마찰 계수, 작업자의 숙련도 편차, 외부 포장의 미세한 변형, 심지어 기상 조건에 따른 작업 간격까지 알지 못한다.
따라서 다음 단계는 반드시 수동 검토 프로세스에 남아야 한다.
- 도어 오프셋 안전 마진: 계산상 2
3cm 여유가 있다면, 현장에서는 57cm 이상으로 마진을 둬야 한다. 도어 프레임의 미세한 휘어짐이나 씰링 고무의 두께, 램프 트럭의 각도 오차는 좌표계에 반영되지 않는다. - 하중 분산 및 축중 배분: 시뮬레이션이 컨테이너 총중량을 맞췄더라도, 트레일러의 축중 분포는 별도 검증 대상이다. 편중 적재는 법적 과적 단속과 직결된다. 좌우/전후 무게 편차를 현장에서 다시 저울로 짚어보는 절차는 생략 불가다.
- LTL/FCL 하차 로직 간섭: 알고리즘은 밀착 적재와 공간 채우기에 최적화되어 있다. 그러나 중간 하차 지점이 존재한다면, 후방부터 역순으로 쌓거나 통로를 미리 남겨두는 시퀀스 재조정이 필요하다. 이 부분은 엔진 밖에서 작업자가 물리적 흐름을 직접 설계해야 할 영역이다.
계산 결과는 설계도일 뿐, 완성된 건물이 아니다. 3D 뷰어에서 확인한 궤적과 2D 평면도가 현실의 장비 한계선과 얼마나 부합하는지, 미적재 목록이 다음 라운드의 제약 조건을 어떻게 구체화해야 하는지. 이 질문들을 던지지 않으면, 95%의 체적률은 야드에서 0%의 실행 가능성으로 역전된다. 화면 밖의 먼지와 소음, 그리고 작업자의 호흡까지 계산식에 넣을 수는 없다. 하지만 그 간극을 인지하고, 도구가 멈추는 지점에서 수동 검증의 칼날을 세워두는 것. 그게 시뮬레이션과 현장을 잇는 유일한 워크플로우다.