容積適合の罠:ドア制約と重量偏りが現場実行を阻むメカニズム
数値は嘘をつかない。だが、最適化アルゴリズムが吐き出す充填率は、開かない鉄の扉の前では単なる幻影に過ぎない。計画ツールが提示する「適合」フラグを無条件に信用する開発者は多い。なぜなら、離散最適化ソルバーは数学的には正しい解を導出するからだ。しかし、その計算前提に実空間の物理的公差と運動学的干渉を含まなければ、出力される配置図は倉庫床に散乱する積荷の地図でしかない。現場が拒絶するのは容積ではなく、無視された制約である。
1. 物理的干渉と安全基準違反の因果連鎖
計画段階で容積率が98%に達した瞬間、プランナーは安堵する。だが、ゲートに近づいた瞬間に運送事業者が作業を停止する理由は明確だ。ドア開口寸法の有効クリアランスと、内部に構築された荷姿の重心位置が、安全閾値を静かに超過している。
容積計算上は適合するが、現場の入口制限(ドア開口寸法・高さクリアランス±2cmの公差帯内)によりフォークリフトの進入軌道が阻害される。層間重量差が15%を超え、コンテナ中心からのCG(重心)偏差が5%を越える場合、何が起きるか。静置状態では問題ないはずの荷姿が、加減速や路面不整による慣性モーメントの偏りでスラスト力を発生させる。コンテナ床版の許容集中荷重を超過し、あるいは積載順序のアンバランスが車輪接地荷重の配分を崩壊させる。これは単なる積載失敗ではない。動的荷重シフトが車両の横転限界を脅かす物理的連鎖である。なぜ、こうした事象が設計レビューで検知できないのか。検証ロジックが「空間埋め」を優先し、「物理的介入可能性」を二次関数で扱っているからだ。
2. 計算アルゴリズムが陥る3つの過小評価要因
多くの積載計画モジュールが、以下の3つの変数を定数として、あるいは完全に無視してソルバーを稼働させる。これが実行不能を招く根本的なノイズ源である。
- 容積率至上主義のアルゴリズム信頼:ビニング問題の最適化目標関数が「充填率最大化」のみを指向する場合、重量制約は単なる不等式ペナルティとして扱われる。結果、軽量品がドア近辺に密集し、高密度品が奥に配置される。積載率は美しい。だが、アンロード順序は現実の作業手順と完全に逆行する。
- 有効内寸とドア開口寸法の混同:ソルバーが参照するコンテナ長さは、内壁から内壁の距離である。現場作業員が実際に扱うのは、開いた両翼が形成する矩形の対角線クリアランスだ。内壁寸法に適合していても、ドアヒンジの突出量や開口角度の制限により、最終段のパレットがスライドインできない。幾何学的適合と運動学的適合は別物である。
- 動態重量シフトの未考慮:静的CG計算は完了している。しかし、輸送中の振動や温度変化による包装材の沈下、パレット木材の含水率変動を無視した場合、初期設定の重心座標は数時間後に意味を失う。動的シフトを許容しない剛体モデルは、現実の貨物に対して脆弱すぎる。
3. 制約可視化と計算前提の整合:必須操作ガイド
計画の前提条件を数値で固定し、かつ検証フェーズで物理的干渉を段階的に切り捨てるには、以下の操作フローが不可欠である。AIの自然言語解析を起点とし、手動での制約定義を経て、3Dガイドビューで検証する。この順序を逆転させれば、ゴミイン・ゴミアウトが確定する。
① 製品パラメータの構造化登録
重量・寸法・最大積載・段積み可能数・向き固定の属性が未定義のままソルバーに入力された場合、計算は仮定の山の上に建つ。以下の手順で製品データベースの精度を担保する。
ワークフロー:AIテキスト解析によるバッチ登録と手動補正 自然言語で記述された仕様書から数値を抽出するプロセスは、入力負荷を削減するが、構造化精度は必ず検証する必要がある。
- 製品管理モジュールへ遷移し、データ管理コンテキストを開く。
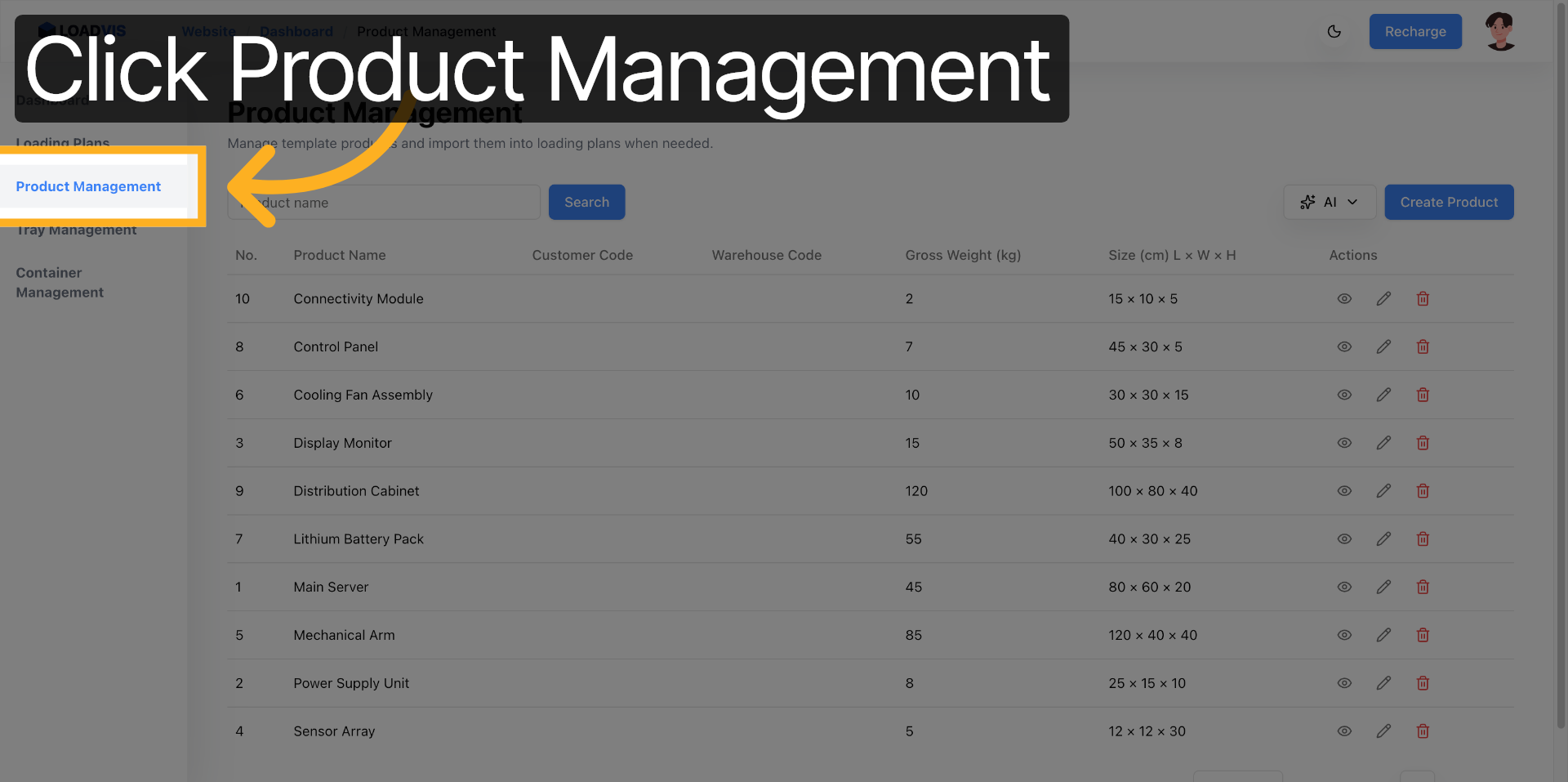
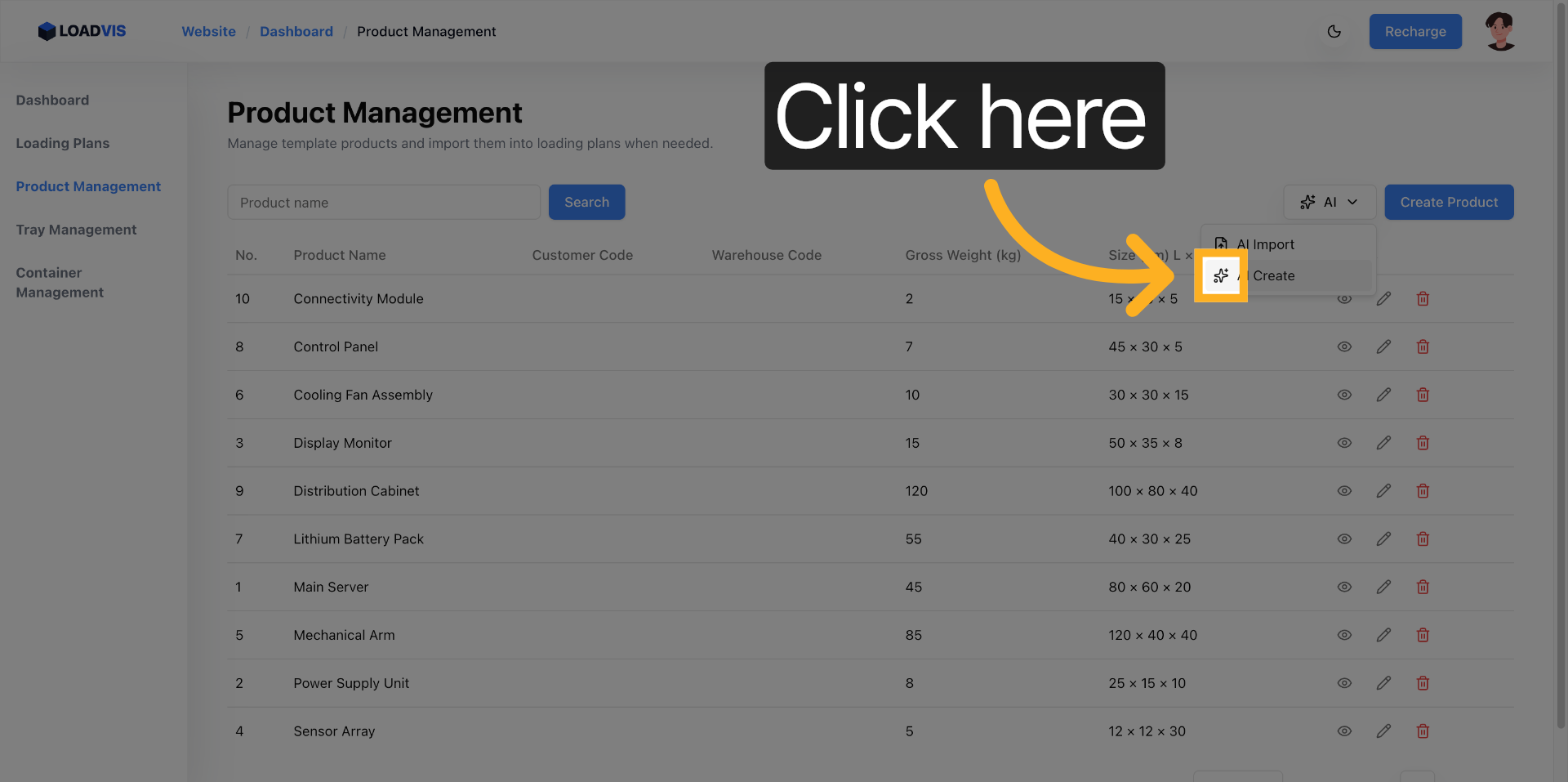
- AI 作成インターフェースを起動し、仕様テキスト解析エンジンへアクセスする。
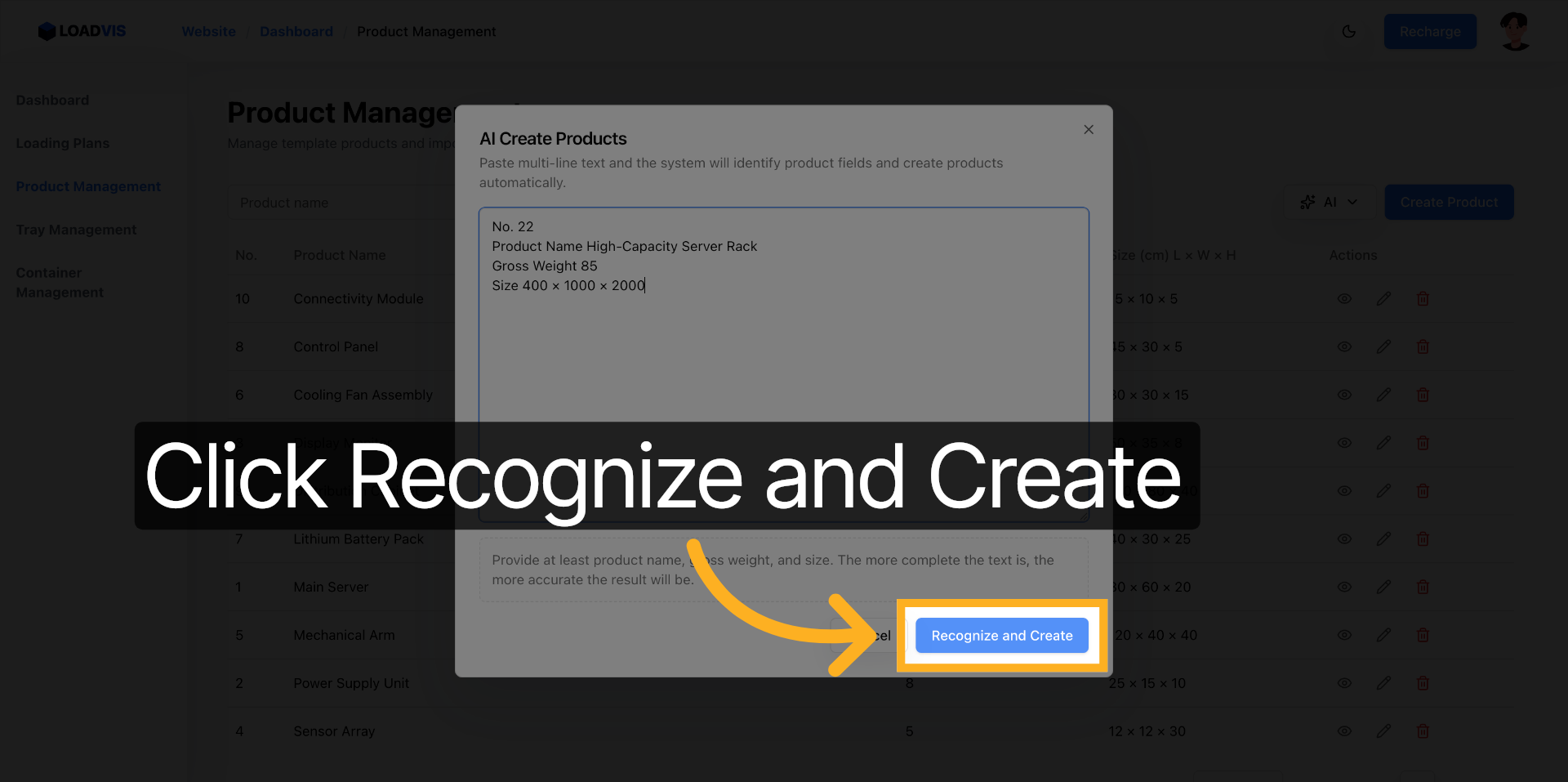
- テキスト入力領域へ製品名、総重量、縦×横×高寸法を入力する。複数エントリは空行で区切ることが可能だ。
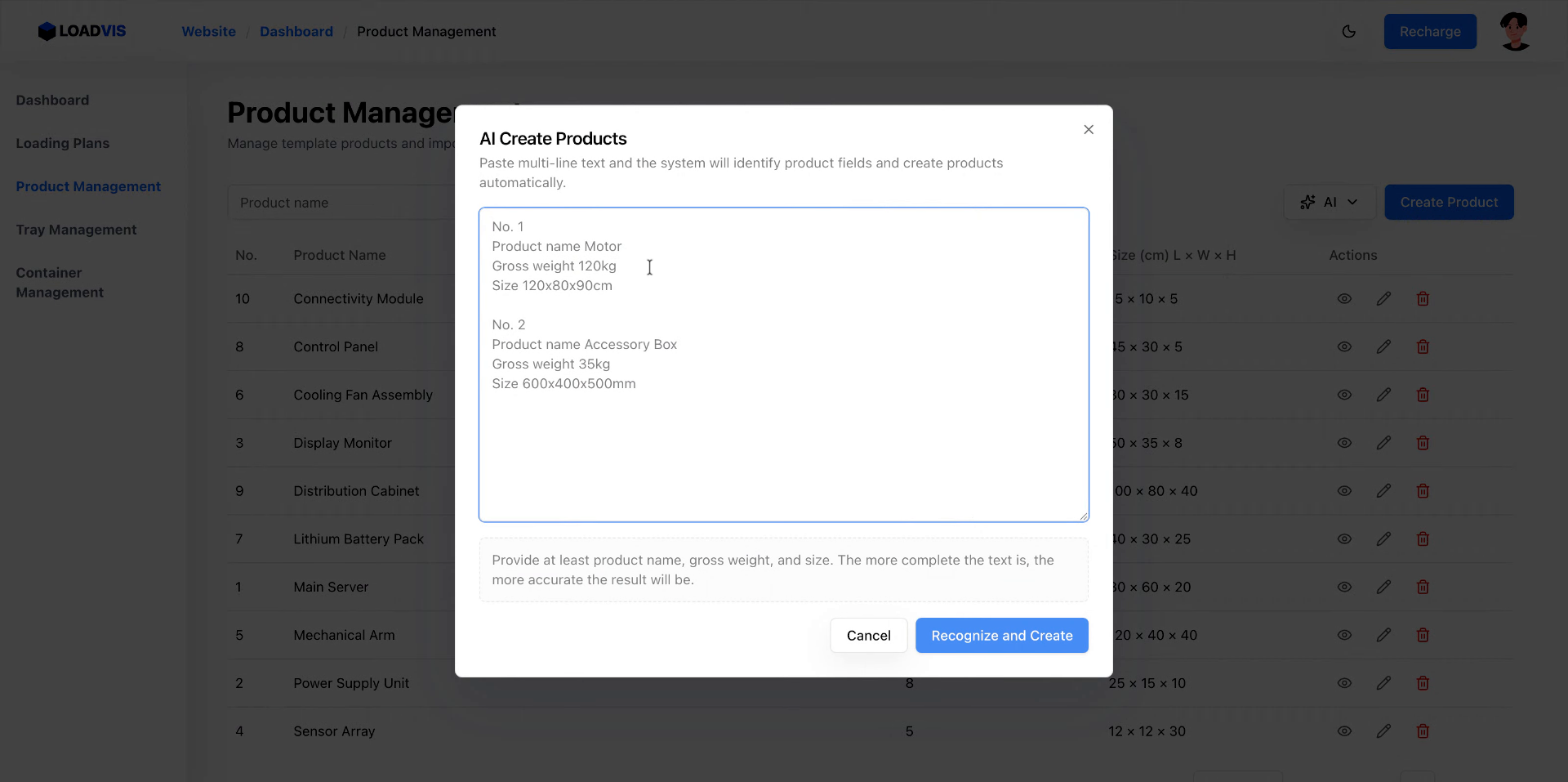
- **「認識して作成」**を実行する。エンジンが固有表現認識によりパラメータを抽出し、データベースへ書き込む。
注意:AI抽出結果はそのまま採用してはならない。総重量と体積密度の相関を確認し、手動編集で公差を補正する。 手動編集によるパラメータ確定
- 対象レコードの**「編集」**をクリックし、パラメータ書き込みモードへ移行する。
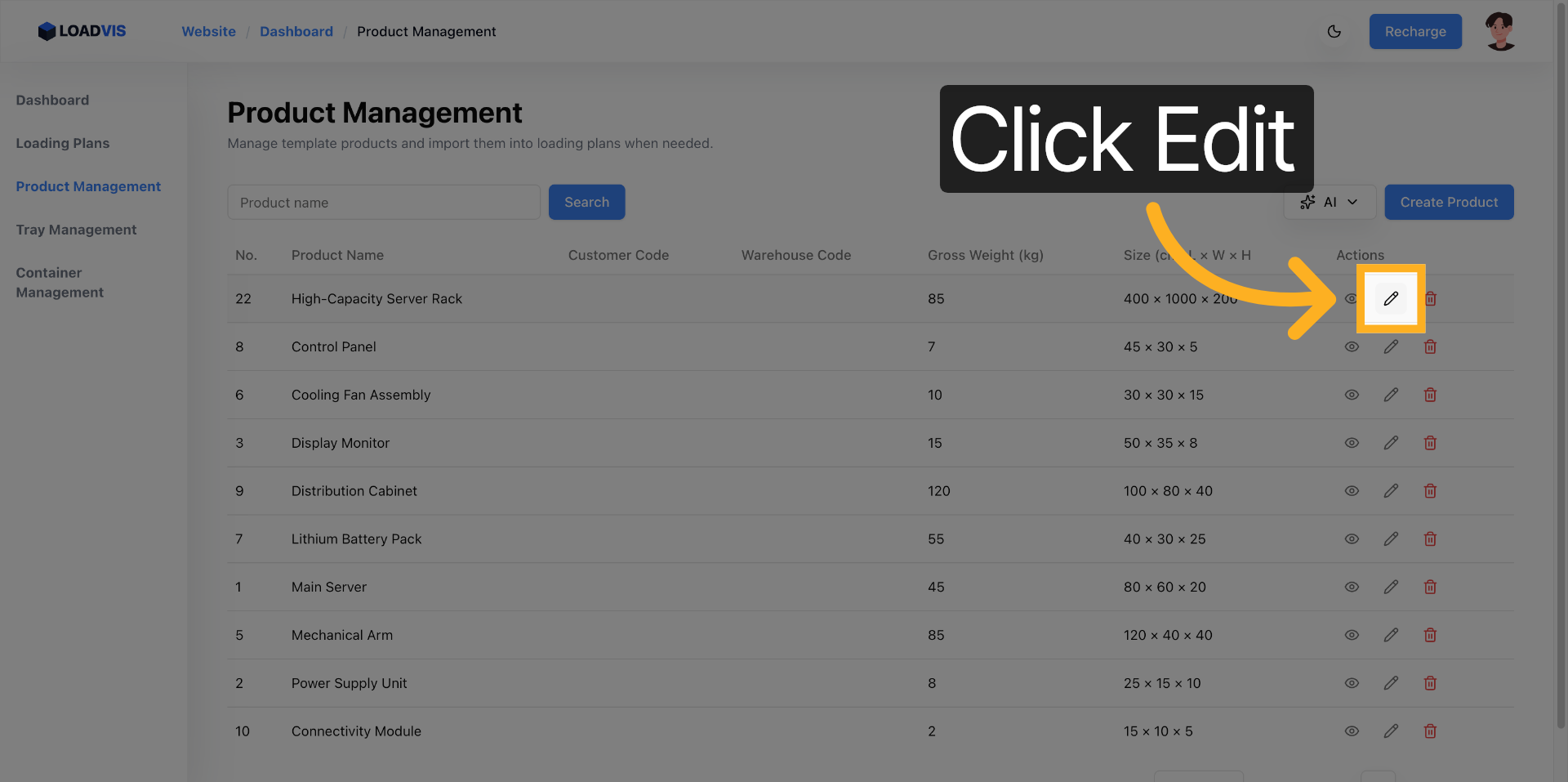
- シリアル番号(例:21)と総重量(例:80kg)を現場計測値へ上書きする。
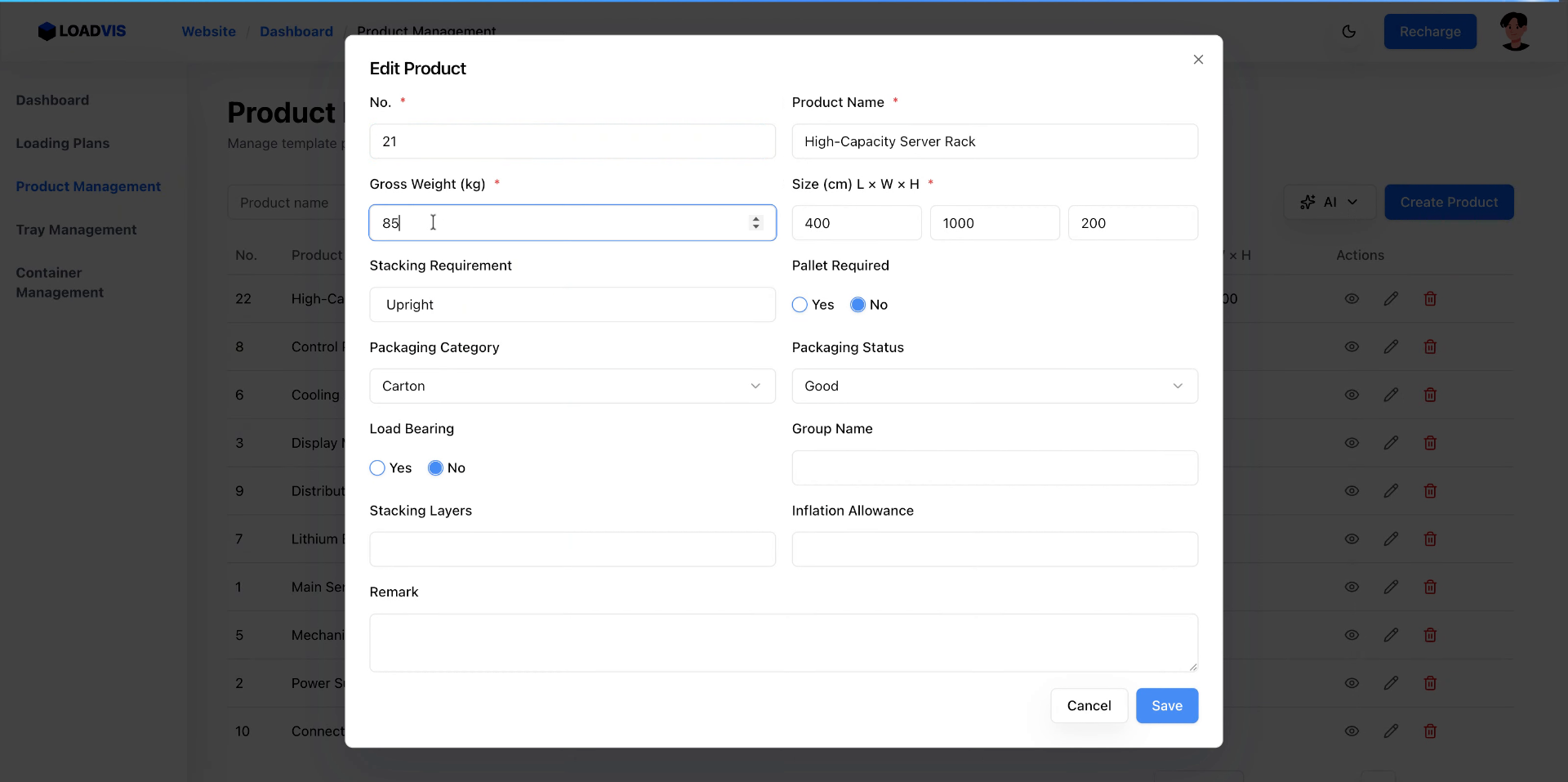
- 寸法フィールド(長さ200、幅1000)を入力し、単位系(cm/mm)の整合性を確認する。
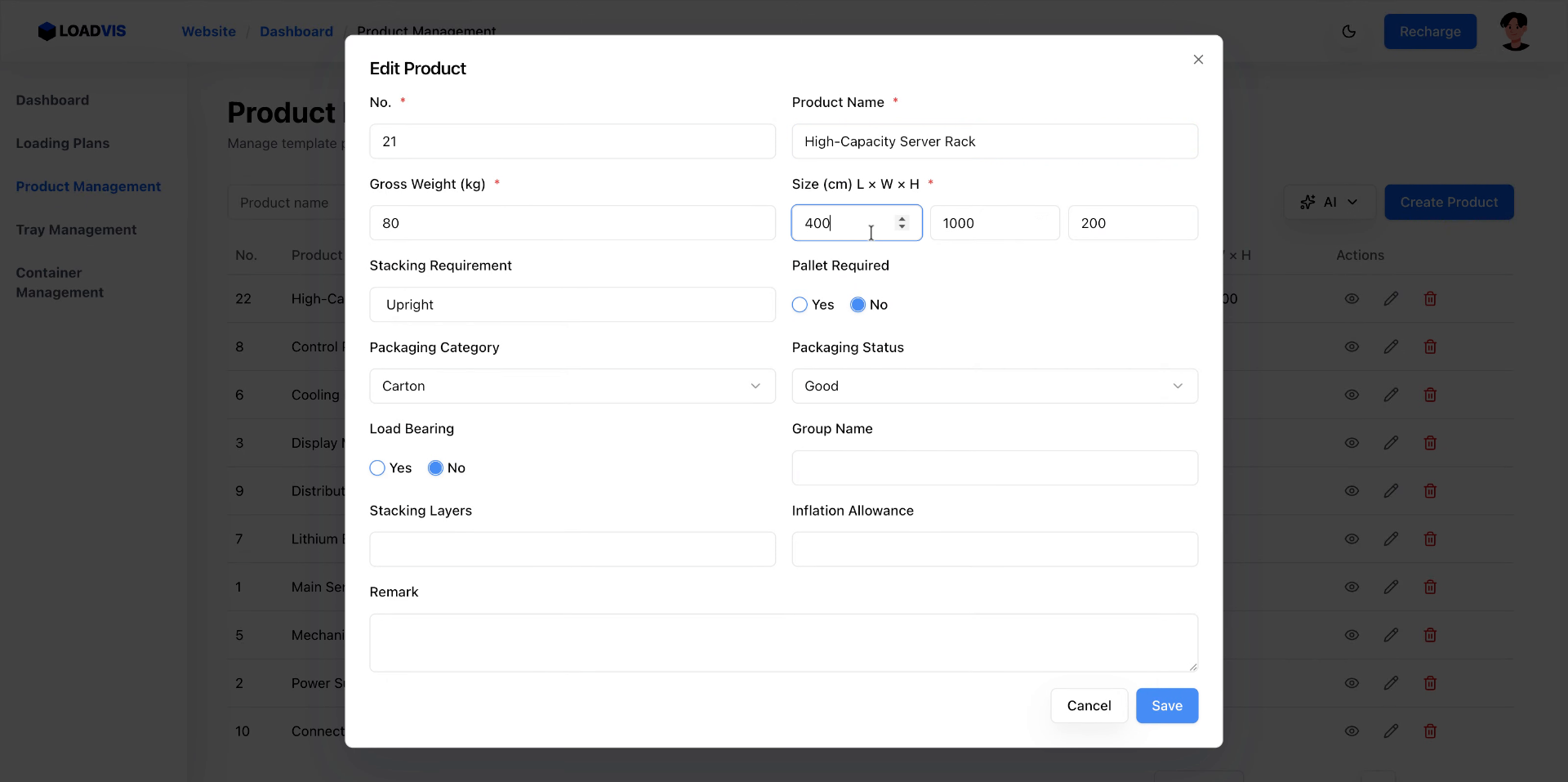
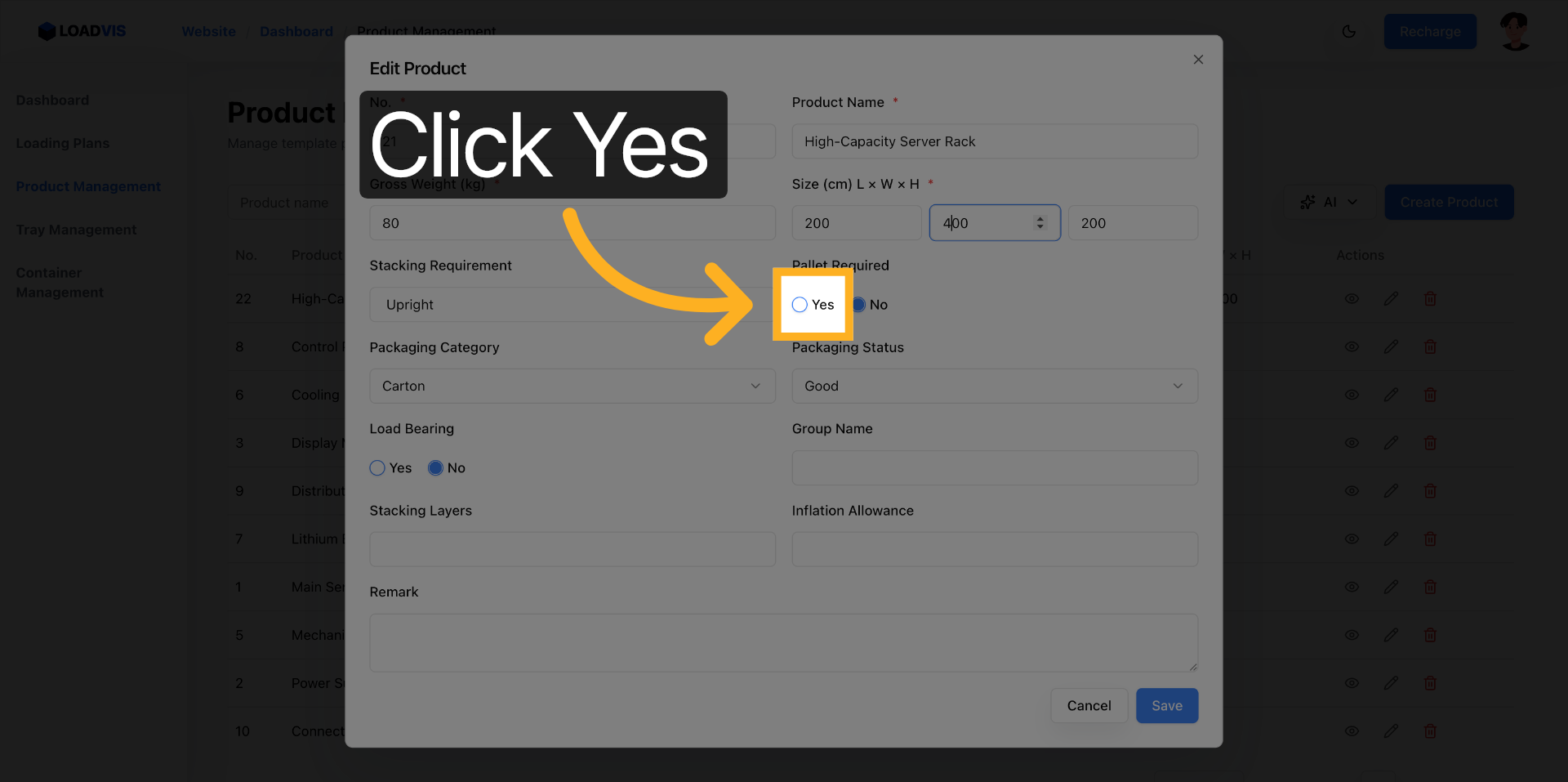
- パレット要件が**「はい」**であれば、システムが自動で積載計算アルゴリズムにパレット体積と自重を組み込む。設定を保存し永続化する。
② カスタム容器定義における開口制約の独立入力
コンテナの外形寸法とドア開口幅/高さは独立した変数として定義する必要がある。内壁スペースを基準にした最適化は、必ず入口干渉を起こす。カスタム容器定義画面では、有効開口寸法と内部有効長を分離して入力し、ソルバーの探索空間を物理的に制限する。
③ 結果検証における干渉確認
計算が完了した後、2D数値表だけで判定してはならない。3Dアニメーションおよびガイドビューを回転させながら、積み順序の物理実現性を追跡する。特に最終段のドア側荷姿が、開扉軌道と干渉しないか、フォークリフトのリーチ範囲内に収まるかを視点移動で確認する。ガイドビューが示す配置順序は、単なる空間解ではなく、実行順序そのものである。
4. 二つのアプローチの分岐点
計画の成否は、何を成功基準に設定するかで決定的に異なる。
| 項目 | 間違ったアプローチ(高確率で失敗) | 確実なアプローチ(現場適合) |
|---|---|---|
| 成功指標 | 容積率90%超えを唯一のKPIとする。 | ドア有効寸法の厳密設定、CG偏差閾値の事前定義。 |
| データ処理 | AIテキスト解析結果を盲信し、検証バイパスする。 | 抽出数値を現場計測値でクロスチェックし、手動で微調整する。 |
| 検証手段 | 出力数値表のみで承認する。 | Guideビューで積み順序の物理実現性を段階検証し、干渉発生時点でモデルへフィードバックする。 |
| 重量制御 | 総重量のみを上限管理する。 | 層間重量差ルール(例:>12%禁止)と左右重量均等を計算制約に組み込む。 |
なぜ前者が蔓延するのか。数値的な達成感は即座に得られ、報告書を作成しやすいからだ。だが、それは計画の完了ではなく、トラブルの先送りに過ぎない。後者は初期設定に工数を要する。閾値を定義し、制約条件を厳密にモデル化する。その手間が、現場の停止時間と賠償リスクを事前に刈り取る。
5. ツールの支援範囲と手動確認の境界線
ソフトウェアが計算可能な領域と、人間の五感および実測データに依存せざるを得ない領域を明確に分離する必要がある。線引きは曖昧にしてはならない。
システムが支援する領域(自動化・演算)
- 自然言語からの製品仕様構造化(AIパース)
- 制約付きソルバーによる離散配置最適化
- 自動CG重心算出および容積率/重量率の即時表示
- 積載順序のヒューリスティック生成
手動確認が必須の領域(物理・環境)
- 非標準ドアの開閉軌道干渉(蝶番突出量、開度ストッパー)
- 製品外装の膨張率・パレット歪みの実測値(温湿度履歴に依存)
- 現場フォークリフトの作業角度制限およびマスト傾斜能力
- 法規制重量のローカル差異(軸重配分、道路制限)
境界条件は数値で固定する。例えば、ドア高さ-製品高さ ≥ 50mm をクリアランス下限とする。左右重量差 ≤ 12% をバランス閾値とする。ソルバーが提示する解がこれらの数値を満たさない場合、計画は無条件に棄却する。なぜなら、アルゴリズムは「可能」を示すだけで「安全」を証明する能力を持たないからだ。境界を数値化し、それをチェックリストとして運用に組み込むことのみが、計画の暴走を止める。
結論
計画の実効性は、アルゴリズムの複雑さではなく、入力データの精度管理と物理制約の厳密なモデル化によって担保される。容積率は空間効率の指標に過ぎない。ドア制約、重量偏り、動態シフトを計算前提に統合し、3Dガイドビューによる段階的検証を通過した計画のみが、現場実行の最低ラインをクリアする。運用データ資産の更新頻度を維持し、実測値とモデル値の乖離を定期的に是正する。それ以外に、実行不能を回避する近道は存在しない。