체적은 맞지만 현장이 멈춘다: 적재 계획의 사각지점과 검증 프로세스
계산서 위에는 98%라는 수치가 선명하게 찍힌다. 그런데 컨테이너 도크 앞에서는 계획서가 종이 쪼가리로 전락한다. 현장 팀은 팔짱을 낀 채 포크리프트 핸들을 놓고 있다. 문턱을 넘지 못하는 화물. 기울어지는 바닥 판재. 계획 시뮬레이션에서는 보이지 않던 물리적 간섭이 실제로는 작업 라인을 마비시킨다. 부피 중심의 사고가 얼마나 허약한지 체감하는 순간이다. 이는 단순한 산술 착오가 아니다. 공간을 ‘채우는’ 행위와 화물을 ‘안정적으로 운반하는’ 행위 사이의 간극을 알고리즘이 아직 완벽히 번역하지 못했을 때 발생하는 구조적 균열이다.
2. 왜 이러한 문제는 자주 과소평가되는가
대부분의 초기 적재 로직은 치수 × 수량 = 체적이라는 1차원 등식에 갇혀 있다. 테트리스 블록을 끼워 맞추듯 빈 공간의 픽셀만 계산한다면, 출력물은 분명 깔끔할 것이다. 하지만 물류는 공간 퍼즐이 아니다. 구조역학과 현장 운영 프로토콜이 충돌하는 교차로다. 언제 오류가 터질까? 대개 다음 세 지점에서 동시다발적으로 발생한다.
입구 제약을 무시한 순서 배치다. 컨테이너 내부는 30㎥가 넘는 빈 공간이지만, 도킹 각도와 문 개방 폭, 리프트 마스트의 회전 반경이 실제 투입 순서를 강제한다. 뒤쪽에 넣어야 할 무거운 SKU가 입구부터 막히면, 계획은 폐기처분된다. 무게 분포에 대한 맹신도 위험하다. 총중량이 규정치 안쪽이라 해도, 전방 축중이 비거나 후방이 쏠리면 제동 거리가 기하급수적으로 늘어나고 전복 모멘트가 발생한다. 데이터 정합성 결여는 더 교묘하다. 마스터 데이터에 입력된 치수가 실제 출하 시 포장 상태(팔레트 추가, 스트레칭 필름 두께, 박스 함몰)와 3mm만 달라도 최적화 엔진의 전제 조건이 무너진다. GIGO(Garbage In, Garbage Out) 원칙은 여기서 예외를 허용하지 않는다. 계획 단계에서는 ‘현장에서 유연하게 조정하면 되지’라는 안일한 판단이 반복되지만, 실제로는 시간 손실, 추가 운송비, 그리고 안전 사고의 직행로가 된다.
3. 단계별 조작에서 추출해야 할 핵심 업무 맥락
워크플로우를 단순한 UI 클릭으로 읽는다면 핵심을 놓친다. 생성(Create), 조건 매칭(Edit), 결과 해석(Detail)은 각각 계획의 신뢰도를 조립하는 검증 고리다. 실제 업무 맥락에서 어떻게 적용해야 하는지 뜯어보자.
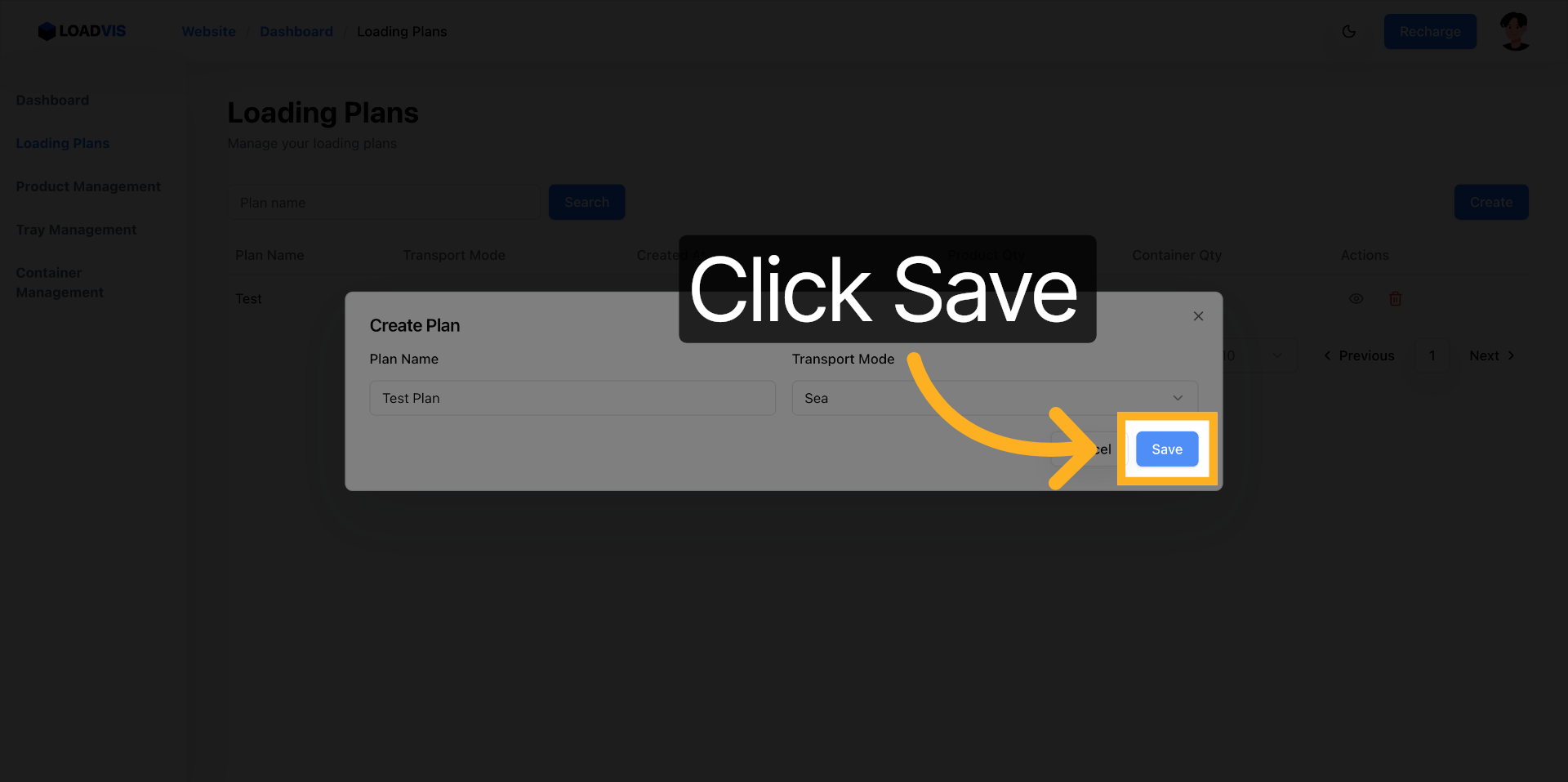
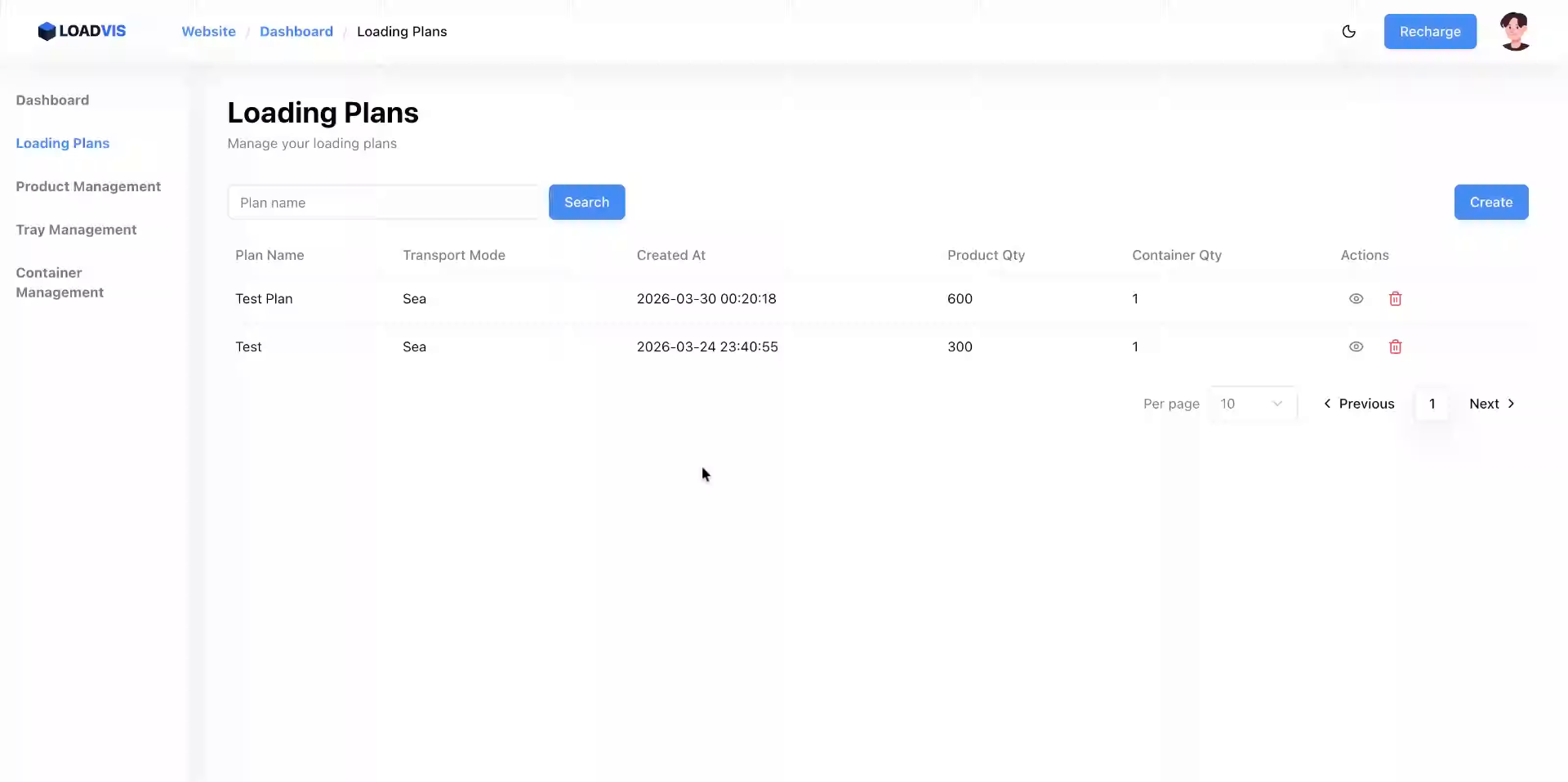
새로운 적재 계획 생성 및 표준화된 이름 할당은 파일 저장이 아니다. 향후 다중 SKU, 복수 출하批次, 팀 간 핸드오버에서 추적 가능한 기준점을 찍는 데이터 거버넌스의 시작이다. 이름 규칙이 2024Q3_EU_PalletA_v1 정도로 구조화되지 않으면, 버전 충돌과 중복 계산은 필연적이다.
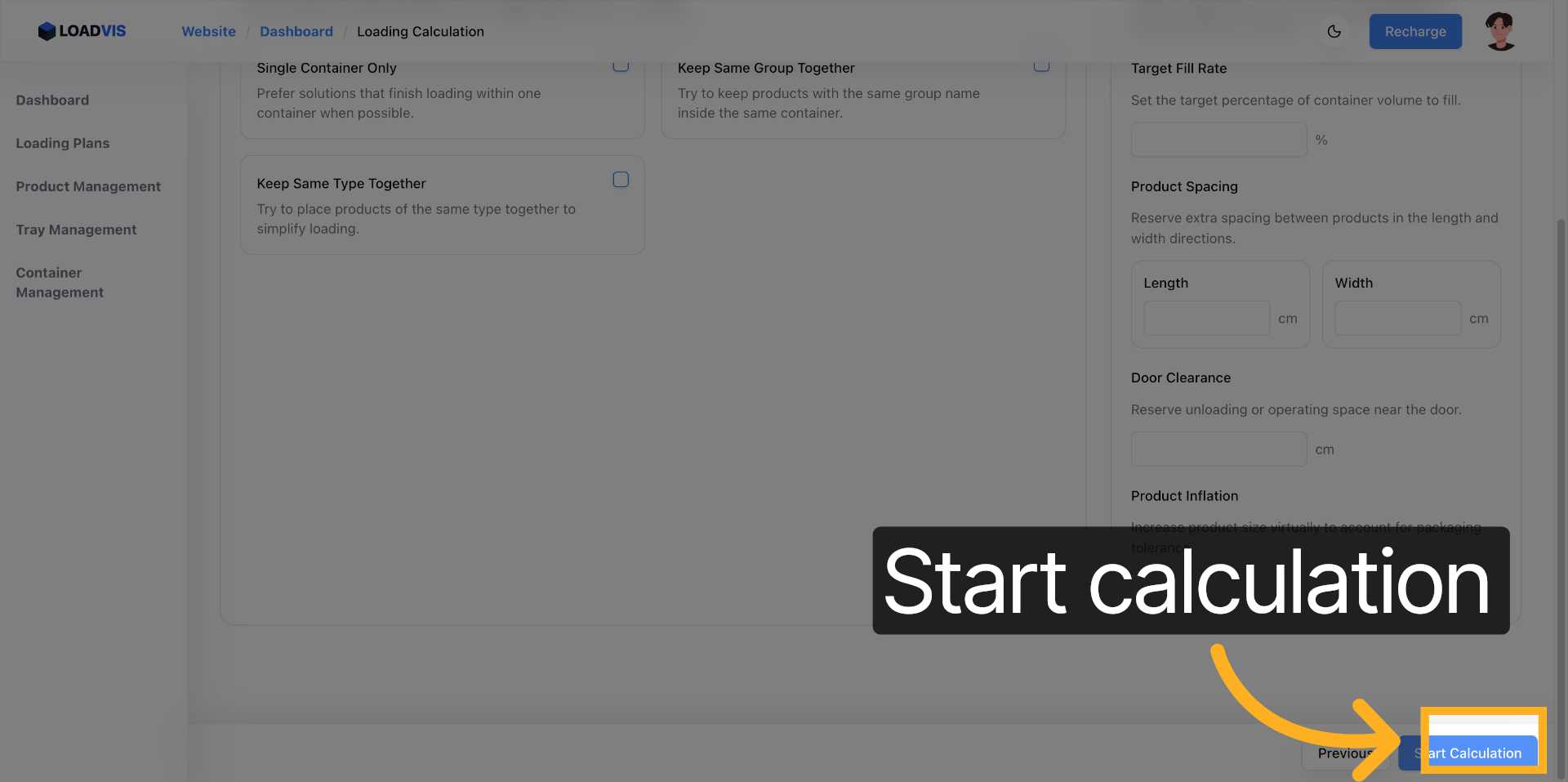
제품 선택, 수량 설정, 컨테이너 바인딩 과정은 알고리즘에 주입하는 전제 조건 정의다. 여기서 중요한 것은 숫자 입력 그 자체가 아니라, 컨테이너의 내부 치수, 문 높이/너비, 최대 적재 중량, 무게중심 허용 편차를 시스템 스키마에 정확히 매핑하는 것이다. 입력 파라미터가 느슨하면 출력된 배치안은 수학적으로만 타당한 허상에 불과하다.

적재됨/미적재됨 통계 확인과 3D 애니메이션 재생, 2D 보조 뷰 전환은 결과의 ‘합리성’을 교차 검증하는 도구다. 미적재 항목을 그룹별로 추적할 때, 공간 부족이 아닌 특정 제약(적층 불가, 방향 고정, 중량 초과)으로 인한 배제인지 판단해야 한다. 3D 뷰에서의 단계별 재생은 적재 순서의 실현 가능성을, 2D 평면 뷰는 현장 작업자가 실제로 배치 가이드를 따라갈 수 있는 직관적 기준을 제공한다. 화면에서 회전축을 잡고 드래그하며 간섭 지점을 찾는 행위 자체가, 현장 돌발을 사전에 필터링하는 수동적 검토다.
4. 잘못된 접근 방식 vs 더 확실한 방법
| 비교 항목 | 잘못된 접근 방식 | 더 확실한 방법 |
|---|---|---|
| 계획 수립 기준 | 부피/수량 중심의 수동 계산 또는 엑셀 임의 배치 | 컨테이너 사양, 하중 제한, 적층 규칙, 방향 제약 등을 전제로 한 알고리즘 최적화 |
| 결과 검증 | 체적률 90% 이상이면 현장 투입 | 미적재 원인 분석, 무게중심 편차 지표 확인, 2D/3D 뷰 교차 검토로 하역 순서 및 공간 간섭 점검 |
| 예외 처리 | 현장 도착 후 화물 재배치 또는 부분 적재 포기 | 계획 단계에서 ‘미적재 그룹’과 ‘제약 조건’을 식별하여 대체 수송(분할 출하) 또는 포장 변경을 사전 협의 |
| 데이터 관리 | 일회성 입력, 계획별 개별 파일 관리 | 마스터 데이터(상품/컨테이너/팔레트) 표준화, 계획 기록의 이력 추적 및 재사용 |
엑셀 드래그로 배치안을 짜던 시절의 잔상이 남아있는 팀이 여전히 많다. 체적률 수치만 보고 “됐네” 하고 출차시키는 순간, 현장은 재작업 지옥으로 변한다. 반례로, 미적재 그룹이 특정 온/오프 온도제어 박스군에 집중되어 있다면? 이는 공간 문제보다 온도 구역 분리 제약이 걸린 것이다. 원인을 분류하지 않고 무작정 컨테이너를 한 대 더 발주하면 운송비는 기하급수적으로 폭증한다.
5. 도구가 어디까지 도울 수 있는가
최적화 엔진의 역할은 조합 가능한 배치의 수학적 해를 탐색하는 것이다. 체적률, 중량률, CG 편차를 동시에 가중치로 두어 파레토 최적점을 근사화한다. 비동기 계산 파이프라인이 구축된 환경에서는 수만 개의 SKU 조합과 다중 컨테이너 시나리오를 처리할 때 브라우저 쓰레드가 블로킹되지 않는다. 계산이 끝난 후 ZIP/Excel 내보내기를 통해 현장 가이드 문서화가 자동화되는 것은 부가적 이득이다.
도구는 ‘가설 검증의 시간’을 압축한다. 반복적인 수동 계산을 백그라운드로 밀어냄으로써 팀은 예외 케이스 식별과 현장 조율 로직에 리소스를 집중할 수 있다. 하지만 알고리즘이 물리 법칙을 재정의하지는 않는다. 입력된 제약 조건 내에서 가장 손실이 적은 경로를 제시할 뿐, 실제 적재 시 발생할 미세한 마찰력이나 화물 간 충격 흡수율까지 계산하지는 못한다. 이 경계선을 명확히 인지하지 않으면, 도구 의존성은 오히려 현장 리스크를 은폐하는 장치가 된다.
6. 여전히 수작업 확인이 필요한 단계 (경계 조건)
어떤 단계에서 반드시 물리적 검증이 개입해야 할까. 알고리즘이 모든 현장 변수를 캡처할 수는 없다. 다음 항목은 계획 승인 전 현장에서 직접 크로스체크해야 한다.
실제 컨테이너 상태다. 노후화된 벽면 변형, 바닥 판재의 요철, 도크 높이와 리프트 각도 차이는 디지털 모델에 반영되지 않는다. 계획이 5mm 간극을 허용했다 하더라도, 현장에서는 화물 모서리가 벽면에 긁히며 진입 자체가 막힌다.
화물 물성 변화다. 습기나 온도에 의한 포장재 팽창, 박스 함몰, 지시 중량과 실측 중량의 편차는 누적될수록 체적/중량 시뮬레이션을 무력화시킨다. 샘플 10개 무게를 재는 것만으로는 부족하다. 배트치 단위 표준 편차를 고려해야 한다.
현장 장비 및 인력 숙련도다. 포크리프트 마스트 높이 제한, 작업 반경, 그리고 적재 순서를 이행할 때 현장 작업자의 실제 핸들링 속도. 계획상의 Step 1 → Step 120 순서가 이론적으로 최적이라 하더라도, 실제 포크 조작 시 시야가 가려지는 구간이 발생하면 작업 효율은 추락한다.
도구는 최적의 ‘이론적 배치안’과 ‘검증 가능한 데이터’를 제공한다. 하지만 최종 실행 승인 전, 현장 조건과의 물리적 교차 확인은 여전히 인간의 책임 영역이다. 계획서는 지도다. 지도가 정확한 축척으로 그려졌다고 해서, 그 위를 달리는 차량의 타이어가 찢어지지 않는 것은 아니다. 변수를 읽는 눈과, 데이터가 닿지 않는 틈새를 메우는 현장 감각. 둘이 맞물릴 때 비로소 계획서는 현장을 관통한다.