算得满却装不进。 装载计划中常被忽视的“可执行性”断层。
一批出口货柜在系统里跑出了 95% 的装载率。 方案下发到月台之后,直接被现场班组打回。 不是外廓尺寸算错了。 也不是集装箱本身存在瑕疵。 问题出在算法把物理世界的装卸逻辑当成了纯粹的三维填充题。为了满足体积最大化的优化目标,求解引擎把重型托盘和轻泡货做了前后交错堆叠,并且完全抹平了叉车作业所需要的转弯余量。更致命的环节在于,卸货端急需优先周转的 SKU 被死死压在箱门最深处。高填充率在数学模型里完全成立。在现场却直接卡死。装卸动线被切断。重心分布呈现危险的偏态。
我们总习惯把系统输出的数字当作最终真理。 这本身就是个认知误区。 装箱计算属于空间几何的范畴。现场作业却是实打实的物理操作题。
为什么这类问题经常被团队低估? 计划人员在进行排载作业的时候,往往默认算法吐出的指令具备绝对的可执行性。这种心态会导致大家把门洞尺寸、层板承重以及货物膨胀率这些参数,当作静态的固定阈值录入到表单当中。动态的作业间隙、实际的装卸顺序、现场工人的操作容错率,通常会被忽略不计。当求解引擎把“填满”设定为唯一的优化目标时,要是缺乏人为注入的操作约束,计算出来的结果必然会和真实物理场景发生脱节。
这并非系统缺陷。 而是目标函数设定与现场业务规则之间的错位。
我们在开展装载计划的管理工作时,必须把约束逻辑提前固化到数据结构当中。下面这几个操作节点,直接决定了方案能不能在现场跑起来。
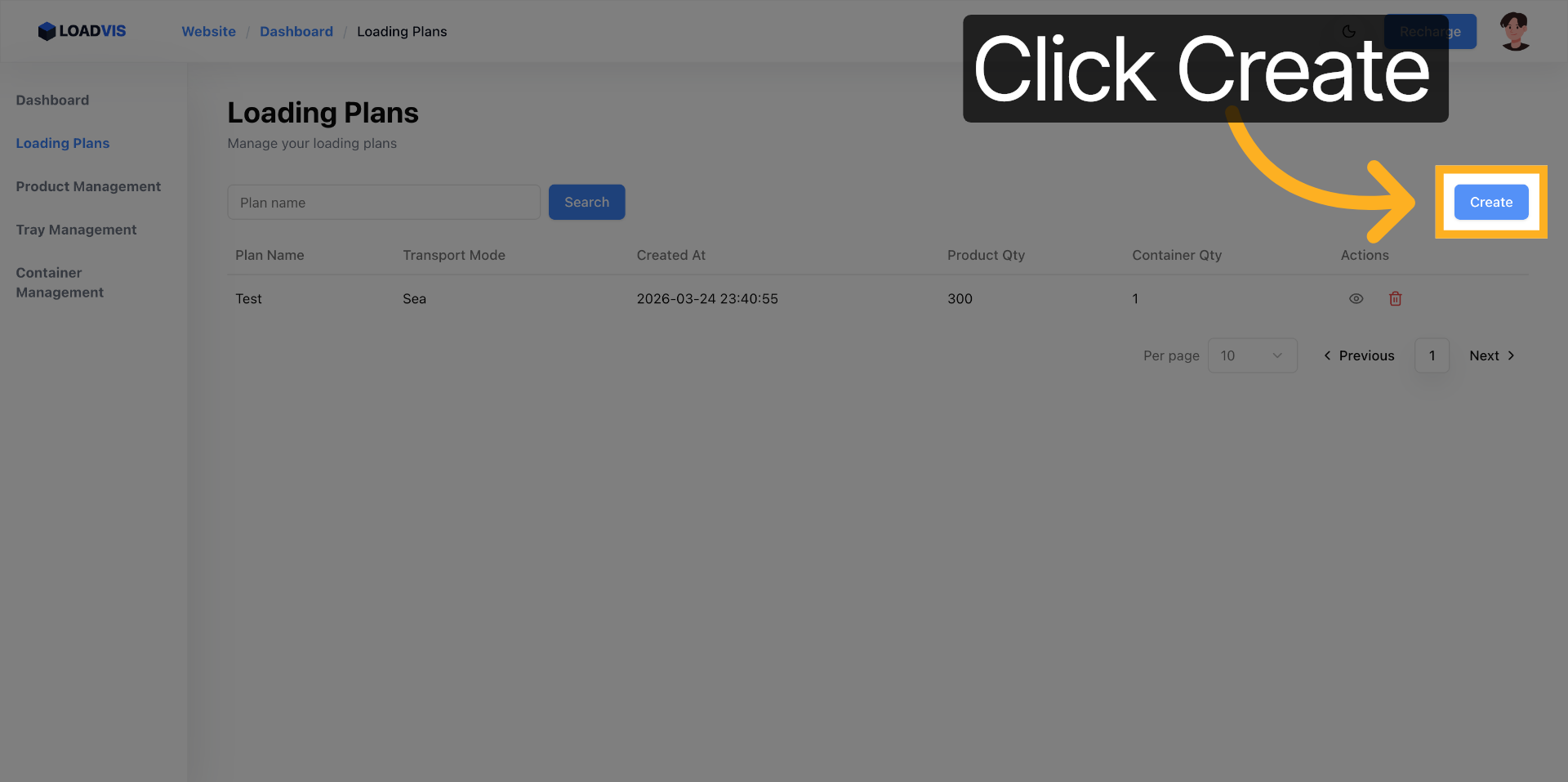
第一步,进行计划建档的命名规范设定工作。执行点击“创建”的动作。在弹出的配置对话框中,你需要把计划标题当作后续复盘的数据锚点来使用。现场一旦发生方案拒收或者调度变更,你需要马上定位到是哪个参数版本出了问题。版本化的命名机制能有效切断无效沟通的链路。标准化的批次标签,是开展历史回溯的根基。
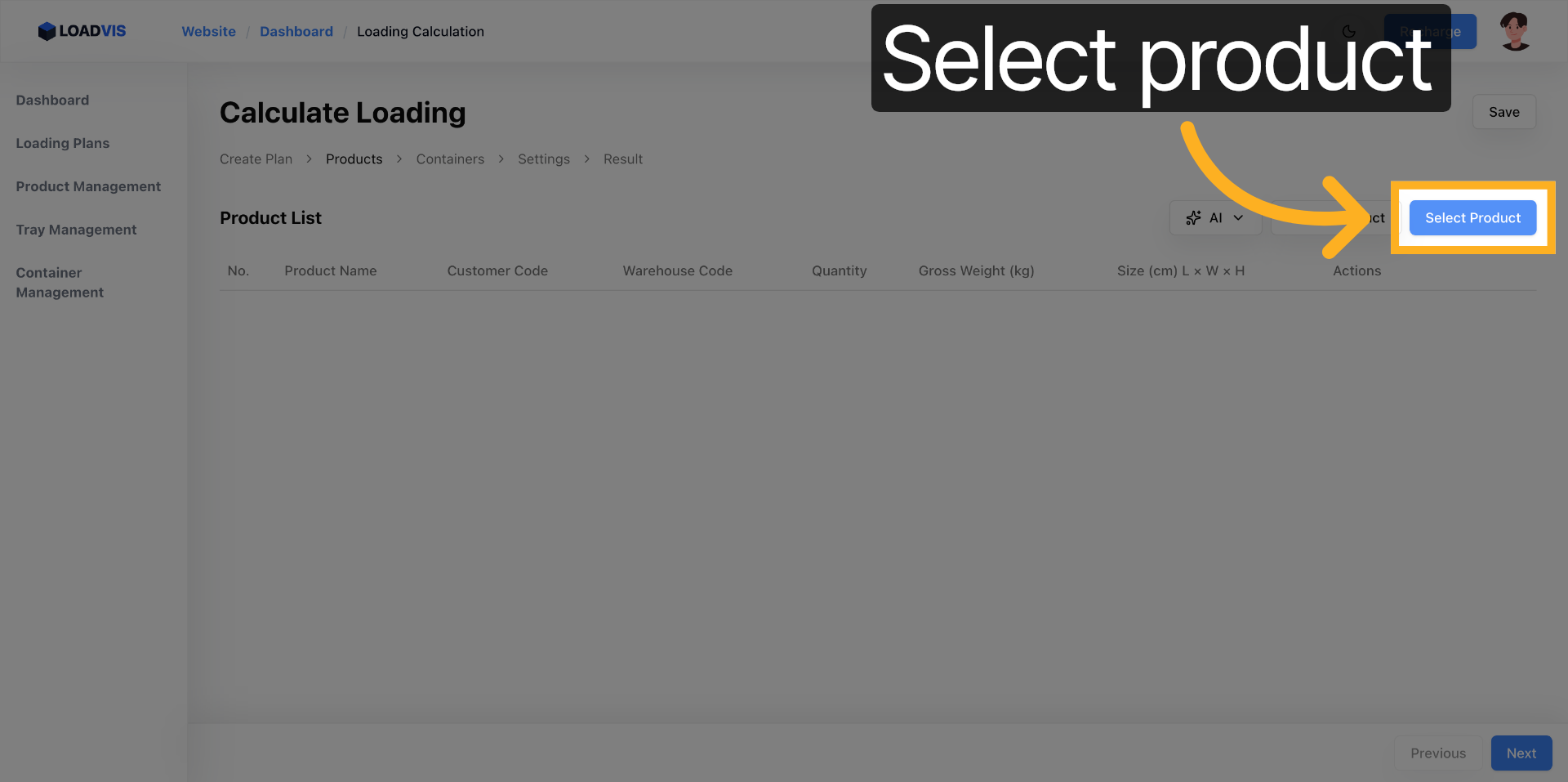
接着看 edit 环节的核心逻辑。
关键不在于你挑选了哪些产品填入列表,在于你究竟向系统输入了怎样的约束条件。货物分组归类、自叠层数上限、承重标识必须在触发计算前完成固化。算法不会自动读取现场老员工的经验直觉。所有的隐性规则都必须转化为结构化的前置参数,这样求解引擎才能开展后续的计算工作。如果跳过参数校验直接点击保存,得到的只是理论层面的纸面方案。
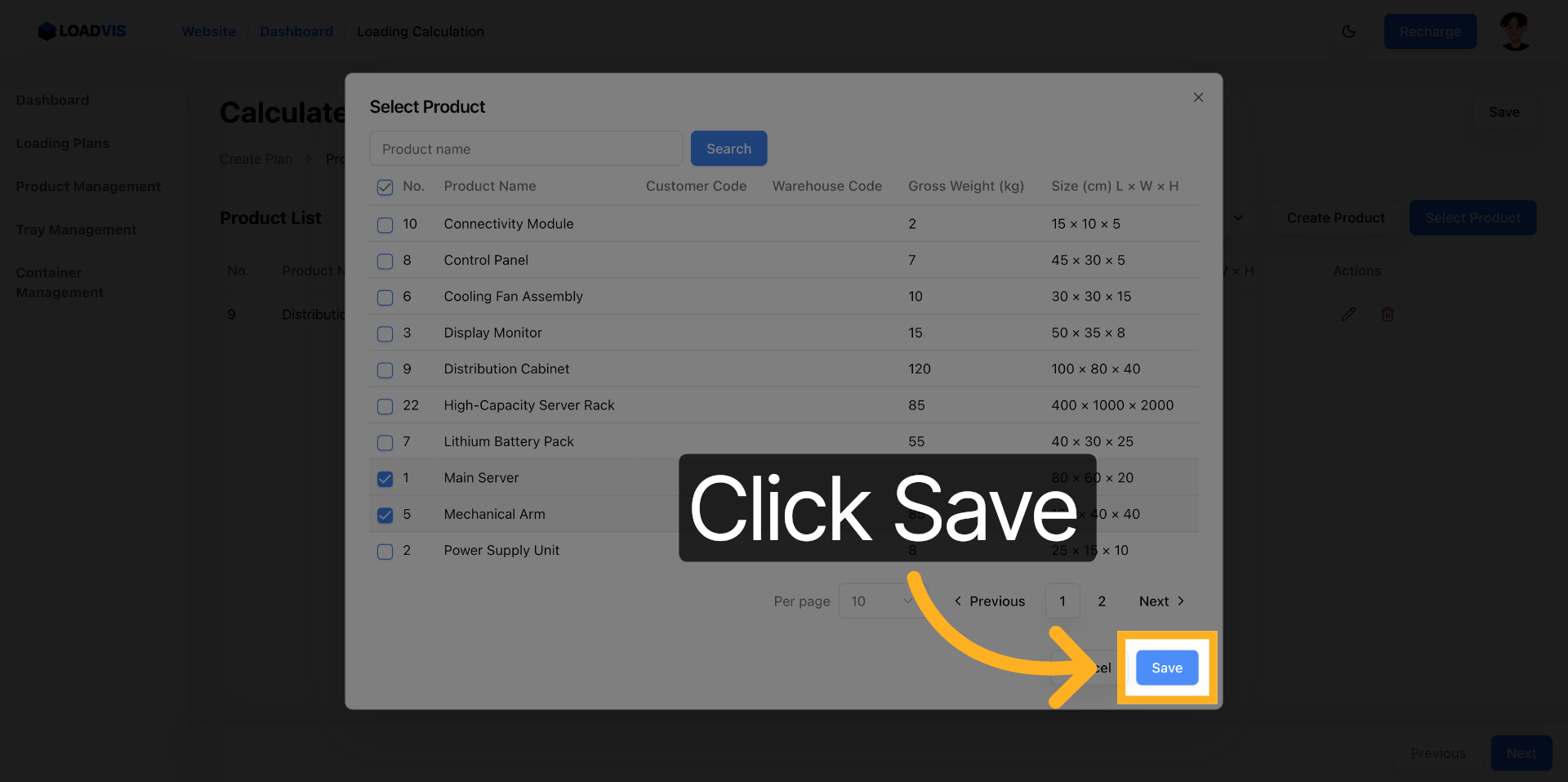
计算触发之后。审查环节才真正开始。
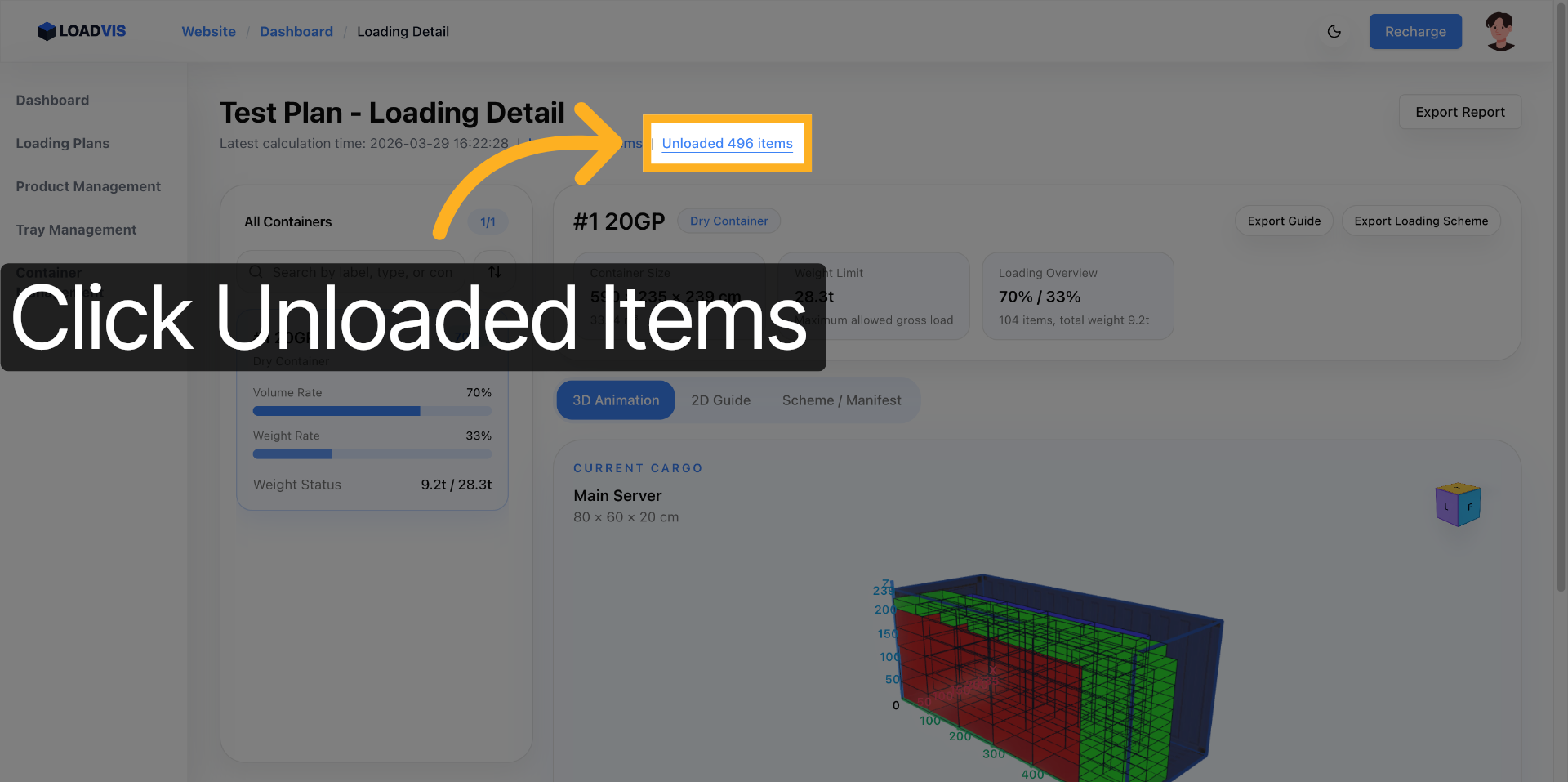
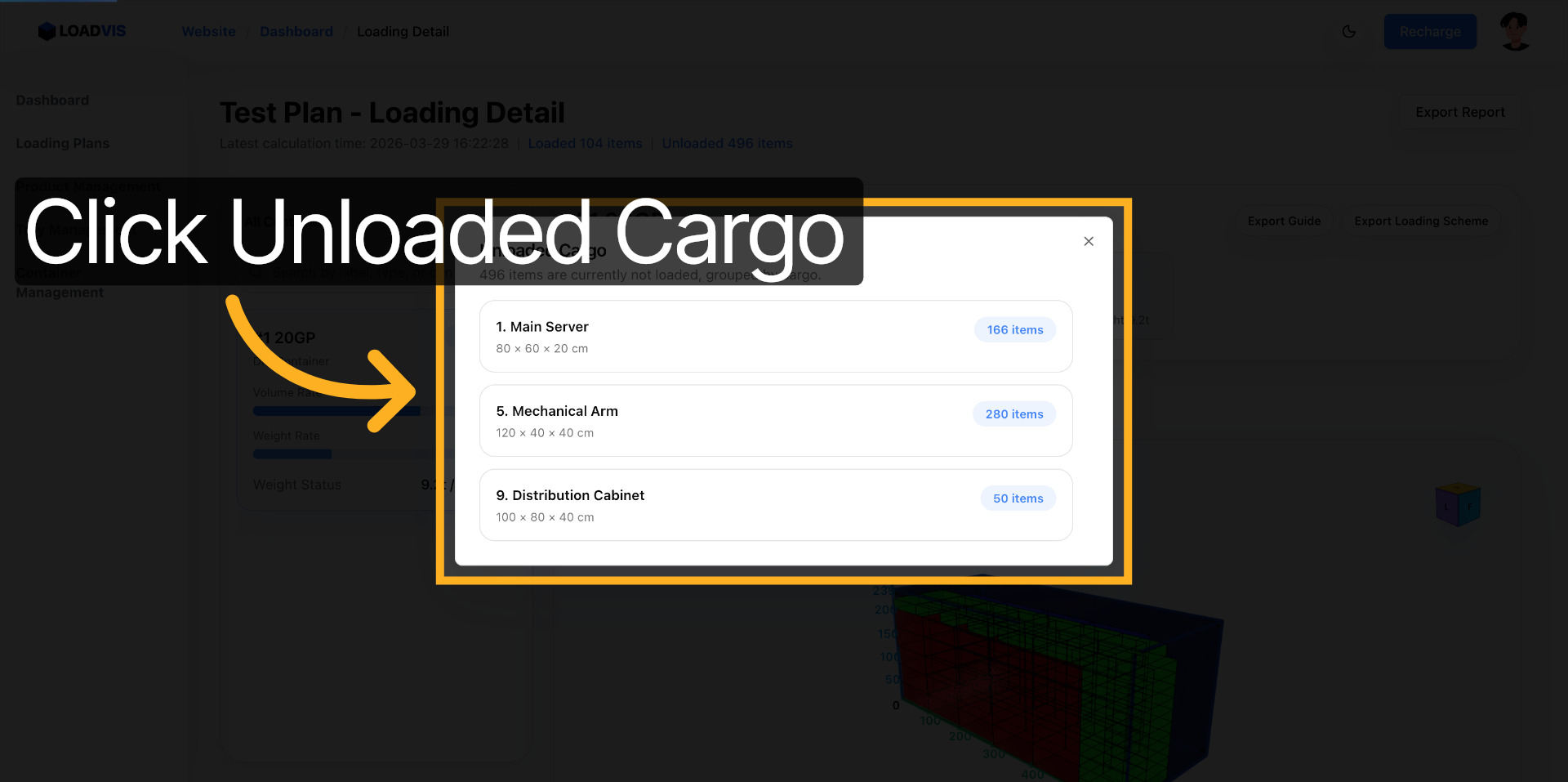
进入 detail 视图。不要只盯着“已装”列表看。那个面板展示的只是满足约束的理想结果。真正有价值的数据藏在拦截日志里。
你需要去逐项处理“未装 496 件”清单当中被系统剔除的条目。必须搞清楚拦截缘由:是总重触及底盘限重阈值?是门洞高度受限导致超高无法入位?还是同组货物被强制拆分破坏了打包规则?这些数据是进行参数微调的直接依据。把拦截报告当作排错指南来阅读,才能定位参数配置的盲区。
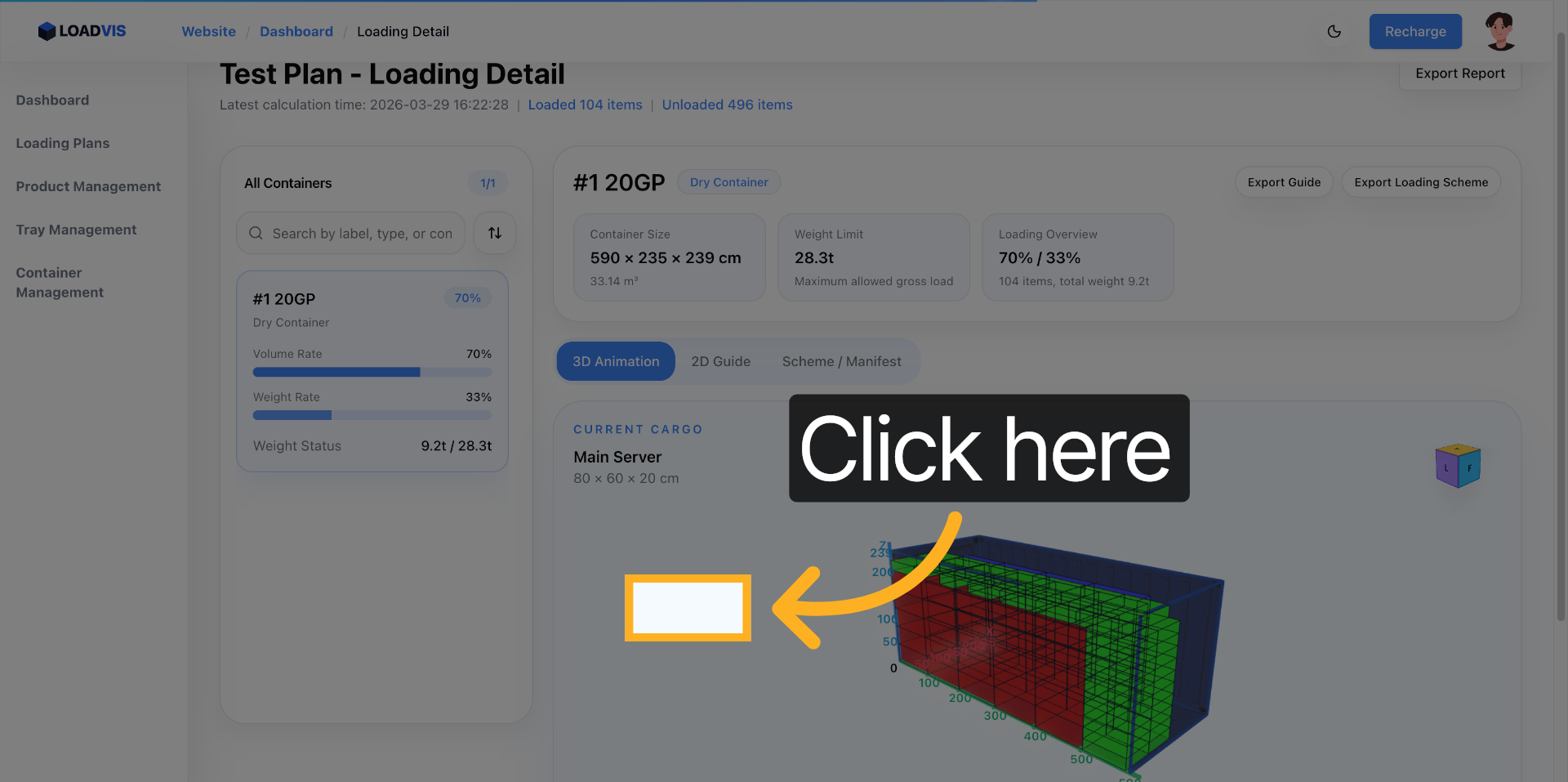
最后一步。 别急着导出图纸。 去拖动三维视图。 目的根本不是欣赏渲染光影。是为了开展空间穿透检查。你需要把观察视角聚焦到箱门开启轨迹、重型底托的分布区域以及底层承重件所承受的压强情况。三维渲染是预判现场物理死角的一种低成本沙盘推演方式。多角度旋转视图,能够暴露出二维列表无法呈现的动线干涉。
常见的执行链路长什么样? 把尺寸清单直接导入系统。 保留默认参数执行一键计算。 把生成的指导图纸下发给仓库班组。 现场卡停。 人工介入进行返工拆解。 这条路走到最后只会消耗调度资源。
更稳妥的执行路径应该被重构为闭环控制: 在数据录入阶段就去校验物理包装状态与分组归类逻辑。进行门限间隙参数的配置以及重量差阈值的设定。触发计算引擎之后,交叉比对未装清单当中的拦截记录。在三维视图中模拟装卸动线走向与重心分布态势。开展参数微调与复算。等现场班组长进行交叉确认之后,再去下达执行指令。
这套链路看起来增加了前期工作量。 但能极大程度上降低现场卡停的概率。
系统不是万能的物理模拟器。 它擅长在给定尺寸数据、重量限制以及堆叠规则的前提下,开展空间最优解的求解工作。它可以自动完成超限拦截的标记动作。能够按照装载次序生成步骤指引以及动态的演示动画。还提供历史记录追溯的机制。这些是算法的强项。
剩下的部分必须由人脑接管。 现场叉车设备的实际回转半径必须人工测量。门洞铰链处的物理净空会因车型不同发生变化。货物受潮或者包装工艺波动带来的体积膨胀误差,系统无法实时感知。重心偏移量在特定底盘结构上引发的动态侧翻风险,依然依赖经验判断。现场工人的堆叠习惯与液压车辅助操作的匹配程度,同样需要实地测试。算法划定的仅仅是理论层面的最优可行域。现场人员负责圈出物理世界的安全操作边界。
装载计划的可靠性从来不取决于算法吐出的填充百分比。 它取决于约束条件的颗粒度设定。 以及审查视角向现场作业习惯的靠拢程度。 平台负责提供计算引擎与可视化交互的基础设施。 可执行性的实现始终依靠对业务规则的精准转译。 以及物理场景的交叉验证工作。 参数录入越贴近实际操作逻辑。 方案落地的折损率就会呈现出下降趋势。 算得满不代表装得下。 把约束做实。 才能让图纸变成可落地的指令。