容積計算は成立するが現場が実行不能になる構造的理由と検証基準
1. シナリオと問題の定義
計算機が「充填率85%、重量制内」と返す。現場は冷や汗をかく。フォークリフトのブレードがドア枠に噛む。アルゴリズムが吐き出す解は数学的には正しい。しかし、物理的な積み込み経路は無視されている。これが構造的な亀裂の正体だ。
積載計画アルゴリズムが提示する理想像が、実際の倉庫や埠頭で執行不能になるケースは後を絶たない。主因は以下の三点に収斂する。 入口寸法(ドア開口高さ・幅)の無視。内部空間は十分でも、積み込み時に要求するクリアランスが確保されない。不均等な重量分布のリスク。ソルバーが幾何学的な隙間を優先し、軸重や床面許容荷重の閾値を軽視した重心配置を提案する。計画の理論的成立と現場実行可能性の乖離。包装の圧縮率、パレットの公差、作業員の習熟度がパラメータに反映されていないため、アニメーション上はスルスルと収まる荷姿が、現実のコンクリート上では微塵も動かない。
なぜ起きるか。単純だ。ソルバーが扱う変数空間が、現実の摩擦や慣性、人間の作業癖を切り捨てているからだ。検証基準を再構築しない限り、この溝は埋まらない。
2. なぜ過小評価されがちなのか
計画担当者は往々にしてコンテナを「単なる直方体」と矮小化する。内部容積と最大総重量だけで最適関数を組む。楽観的すぎる。実際の鉄骨は経年により僅かに歪む。ドアヒンジの摩耗は開口有効幅をカタログ値より狭くする。輸送法規が課す軸重規制は、総重量がクリアしても個別の車軸がオーバーロードなら即座に通行止めを喰らう。
これらのパラメータは、アルゴリズムのデフォルト辞書に載っていない。載っていないから、ソルバーは「制約違反なし」と判断し続ける。データの不備が計画の成否を握っているという構造的欠陥を認識しない限り、同じ轍を踏む。何度でも。我々が陥る認知バイアスは、デジタルモデルを現実そのものと同一視する錯覚にある。モデルは現実の写しではない。現実の代理変数に過ぎない。この区別を曖昧にした瞬間、計画書は紙切れと化す。
3. 重要操作の抽出とその根拠
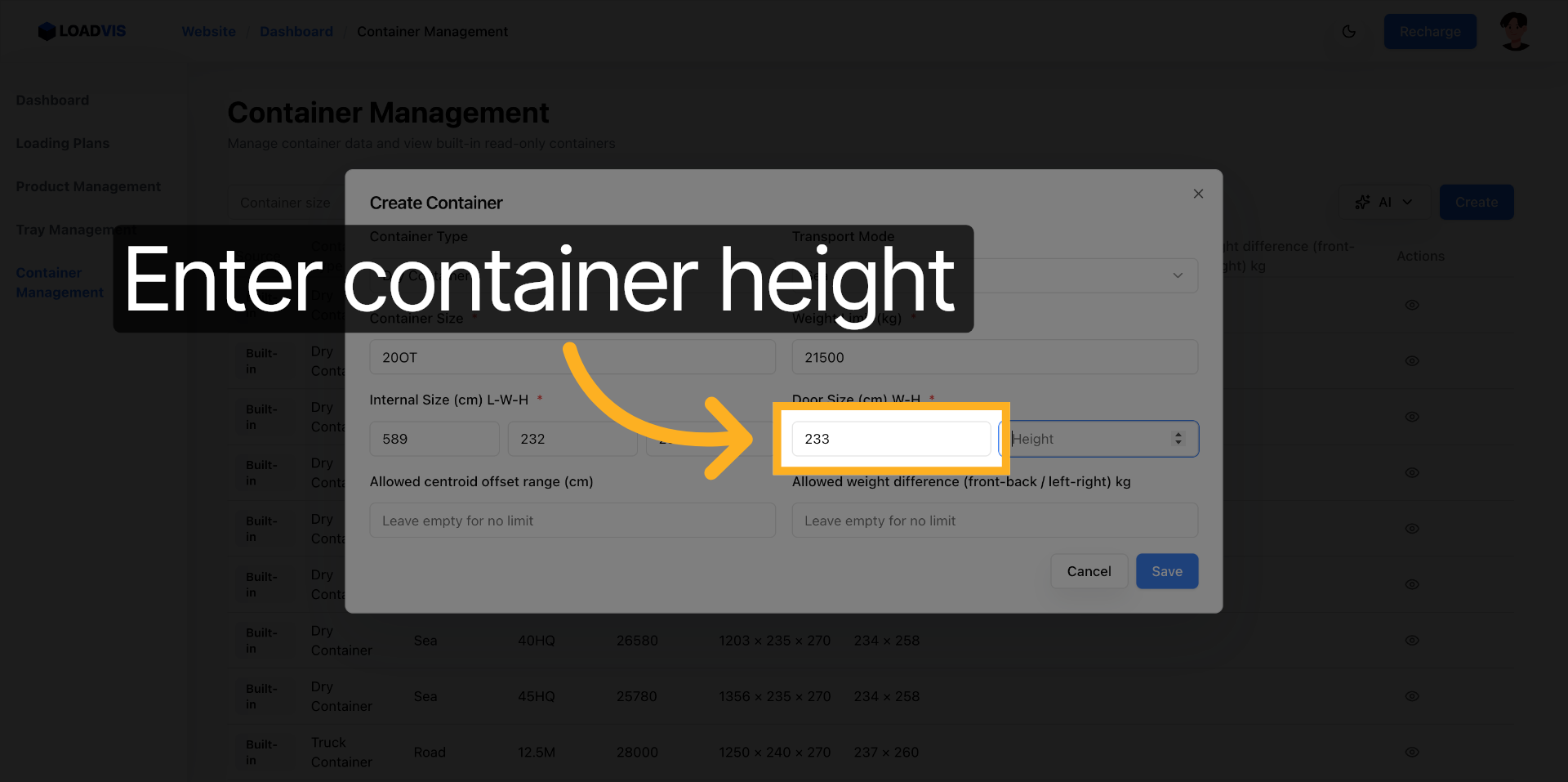
ワークフローを解剖する。計画の生死を分けるのは、数値入力の瞬間だ。内部寸法とドア開口寸法は別の生き物である。ソルバーは「ドア開口高さ」を積み込み経路の干渉判定に用いる。カタログの内部高さをそのまま流用してはならない。フォークリフトのマスト昇降量やパレットの傾斜角を考慮し、実測値または安全マージンを含めた値を入力する必要がある。以下が、境界条件を定義する必須手順である。正確な入力なくして、探索空間は歪む。
新規作成(Create)による境界値の定義
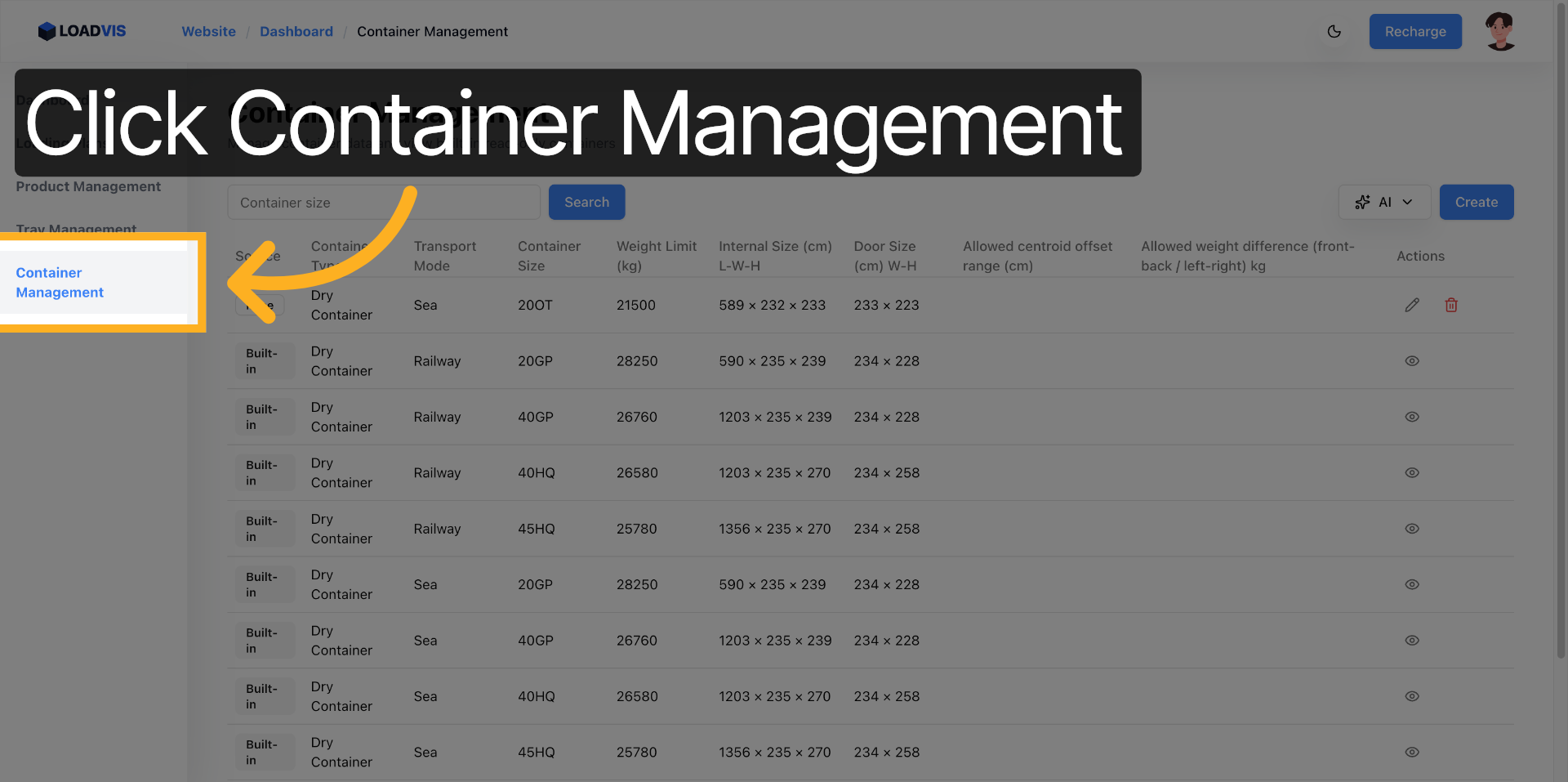
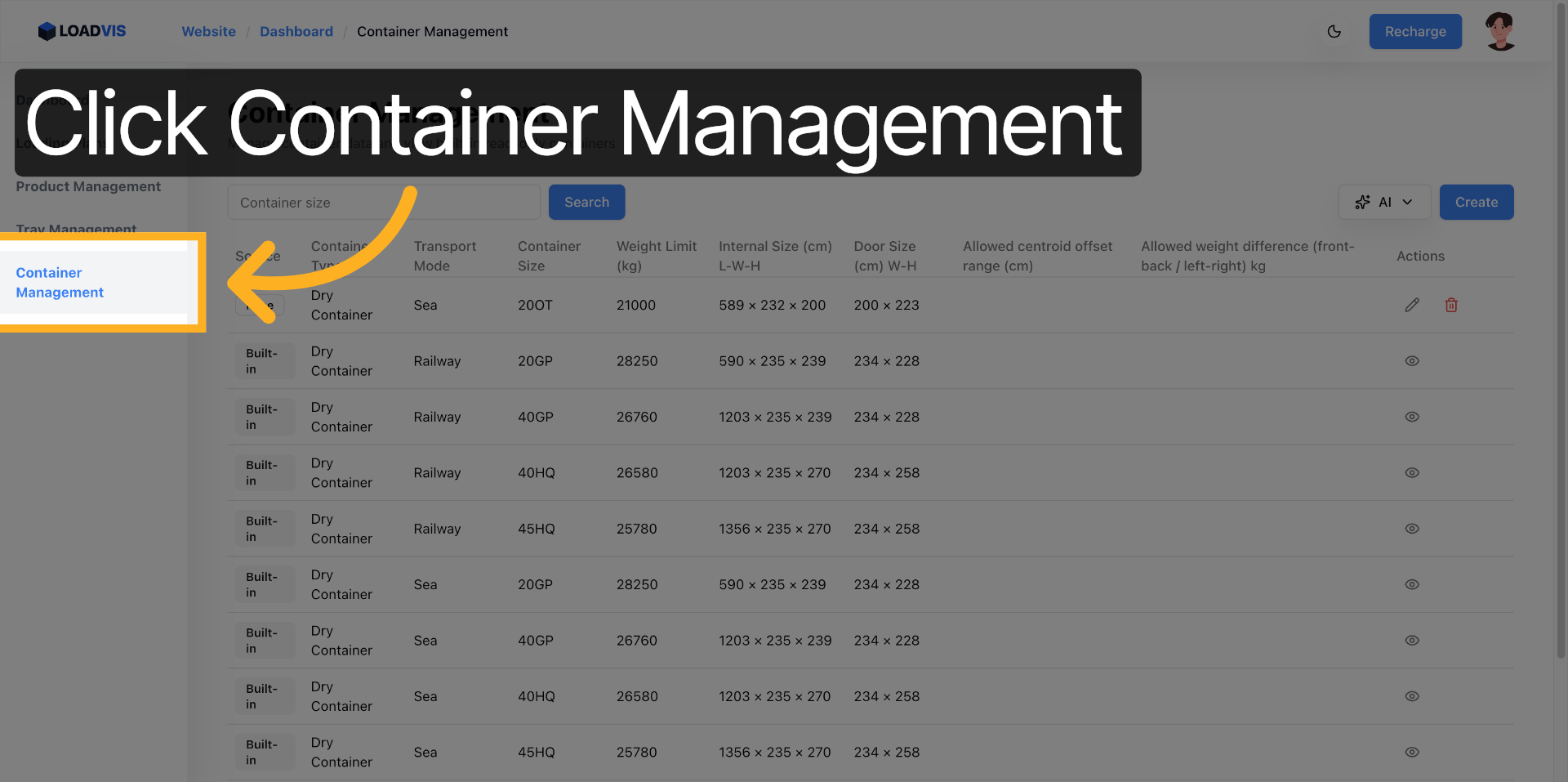
 「コンテナ管理」をクリック。設定エリアへ進入する。
「コンテナ管理」をクリック。設定エリアへ進入する。
 「作成」を選択。情報入力フォームを展開する。
「作成」を選択。情報入力フォームを展開する。
 コンテナコード欄に固有識別子(例:
コンテナコード欄に固有識別子(例:20OT)を入力する。マッピングの起点だ。
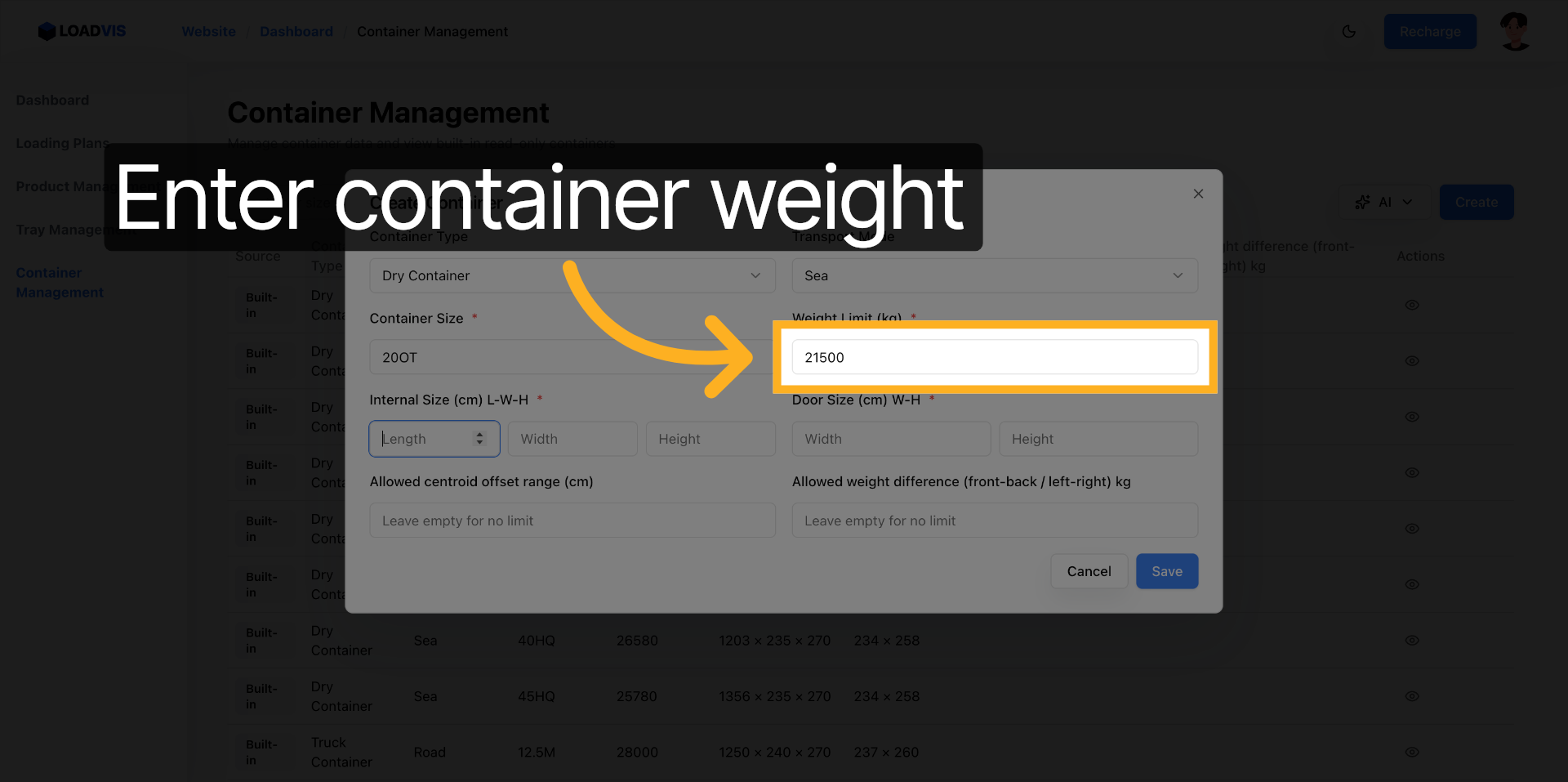
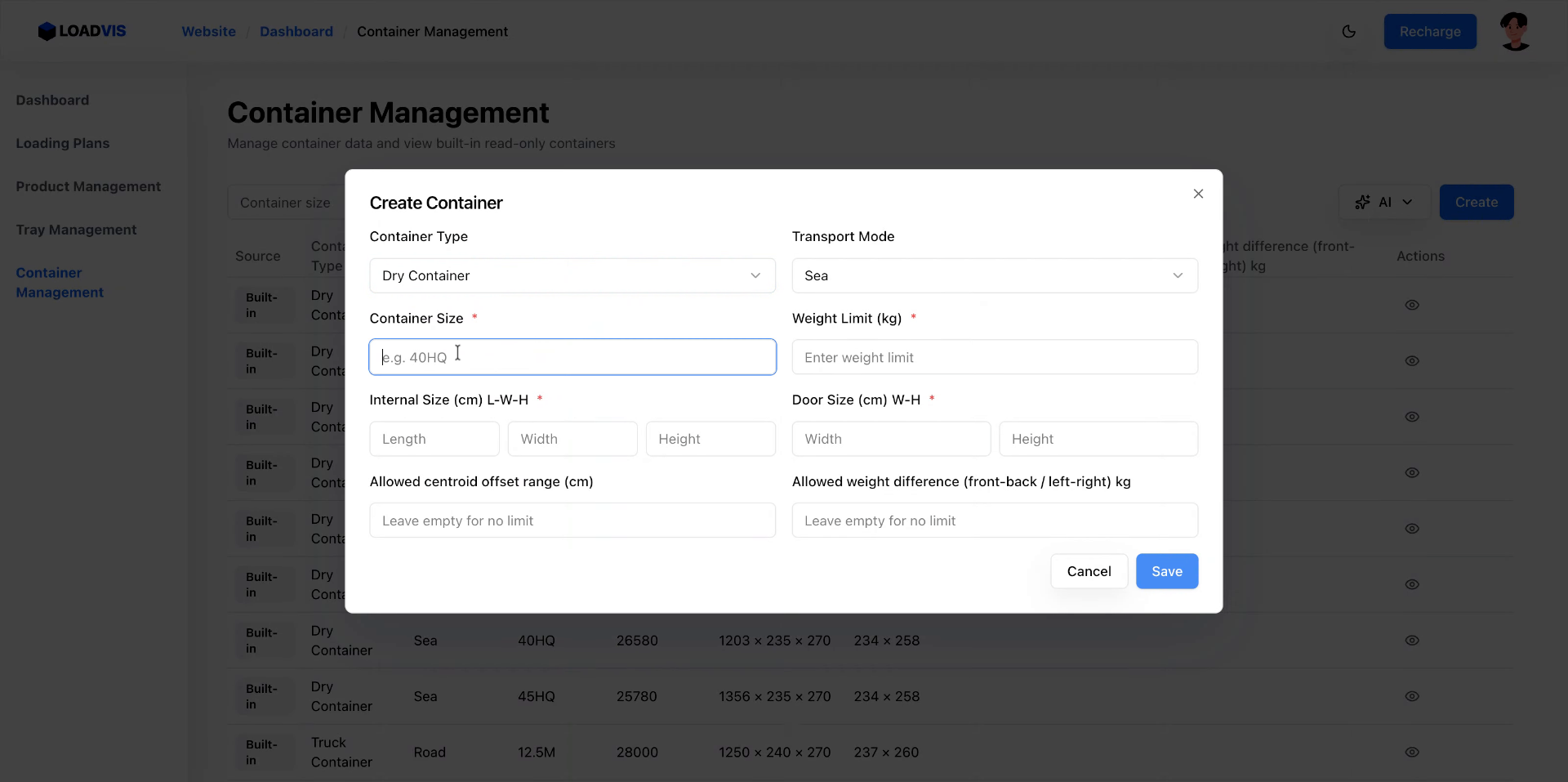 積載制限に最大定格容量を入力。単位は厳格に
積載制限に最大定格容量を入力。単位は厳格に kg。
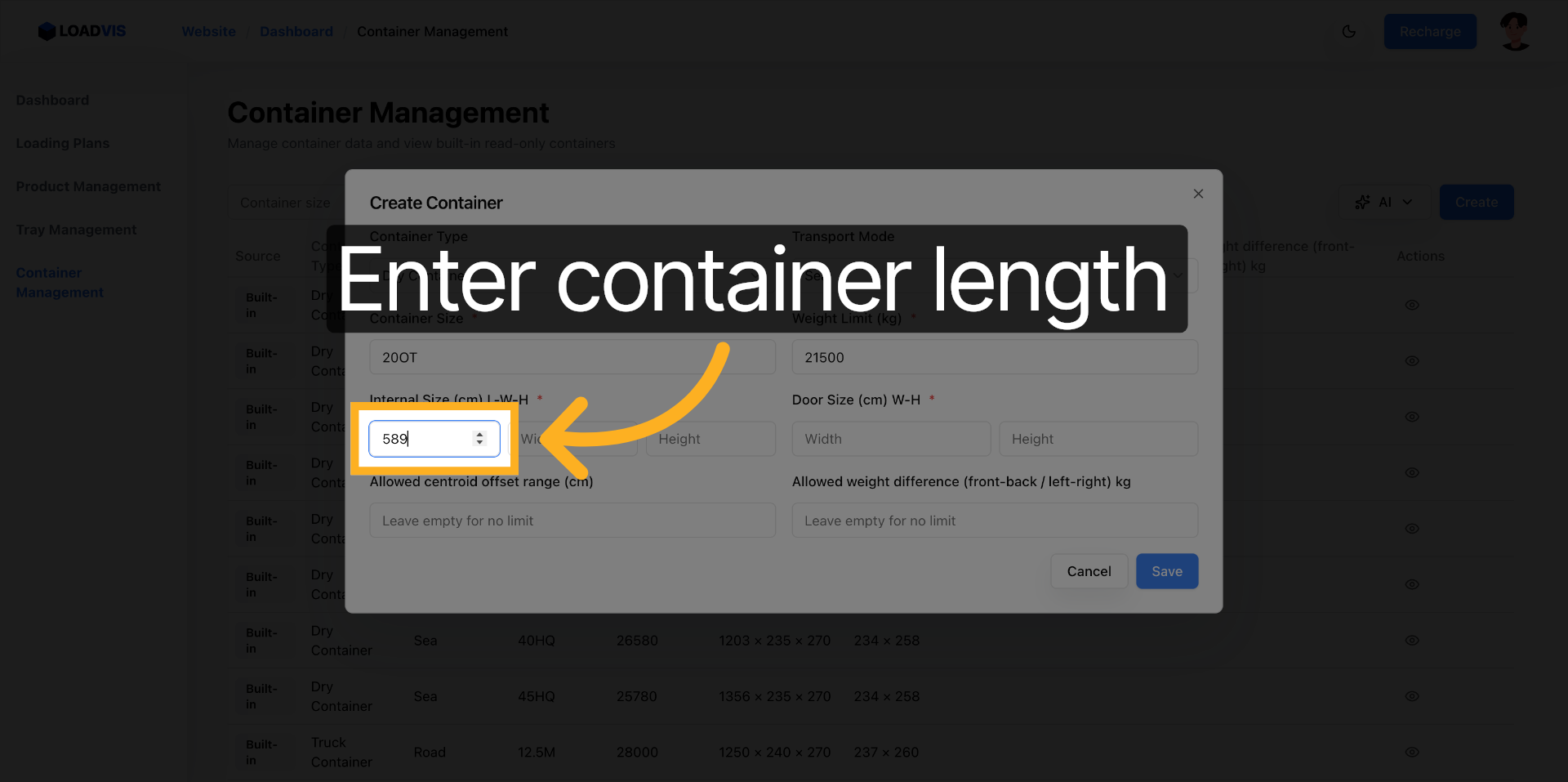
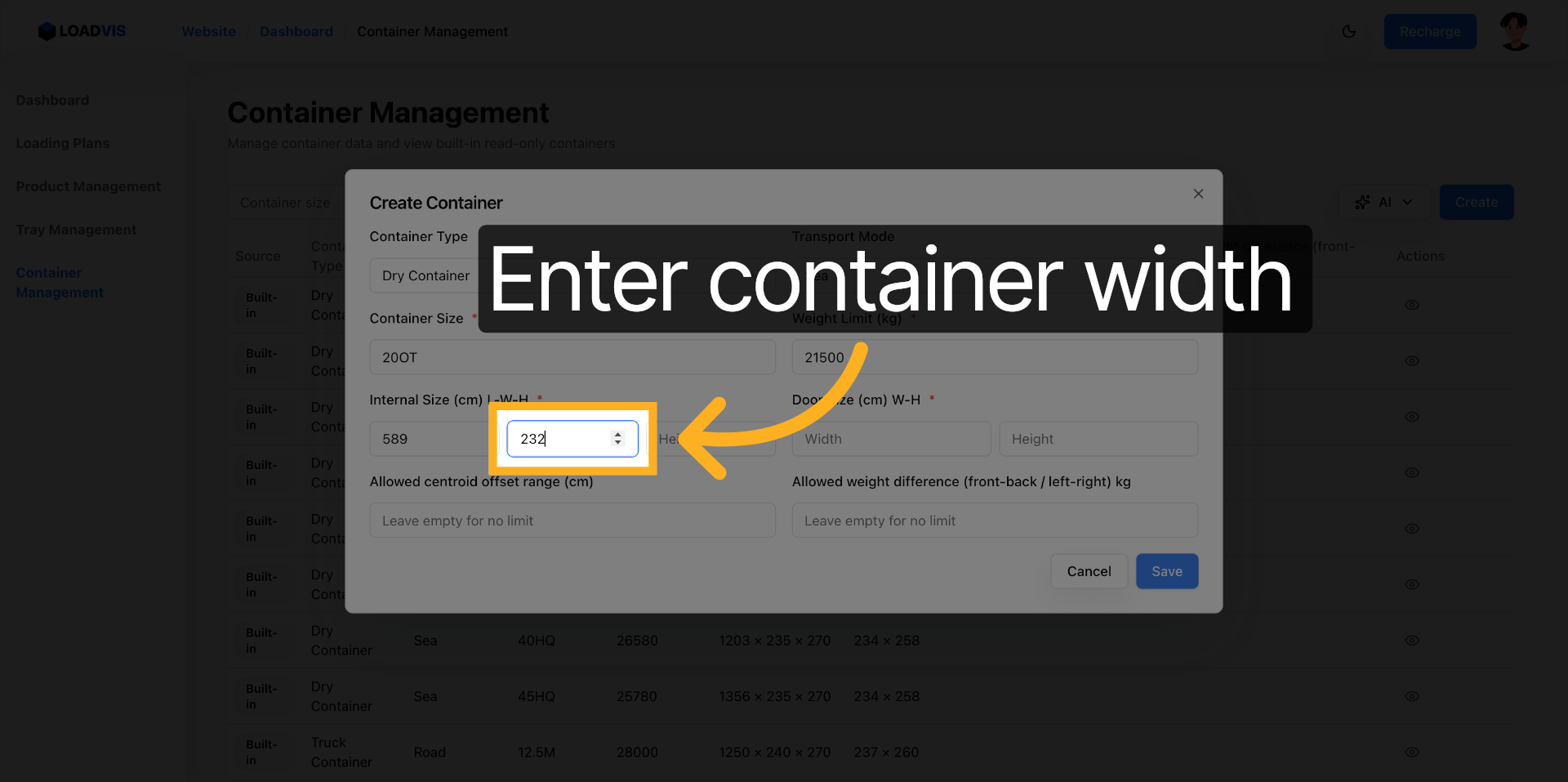
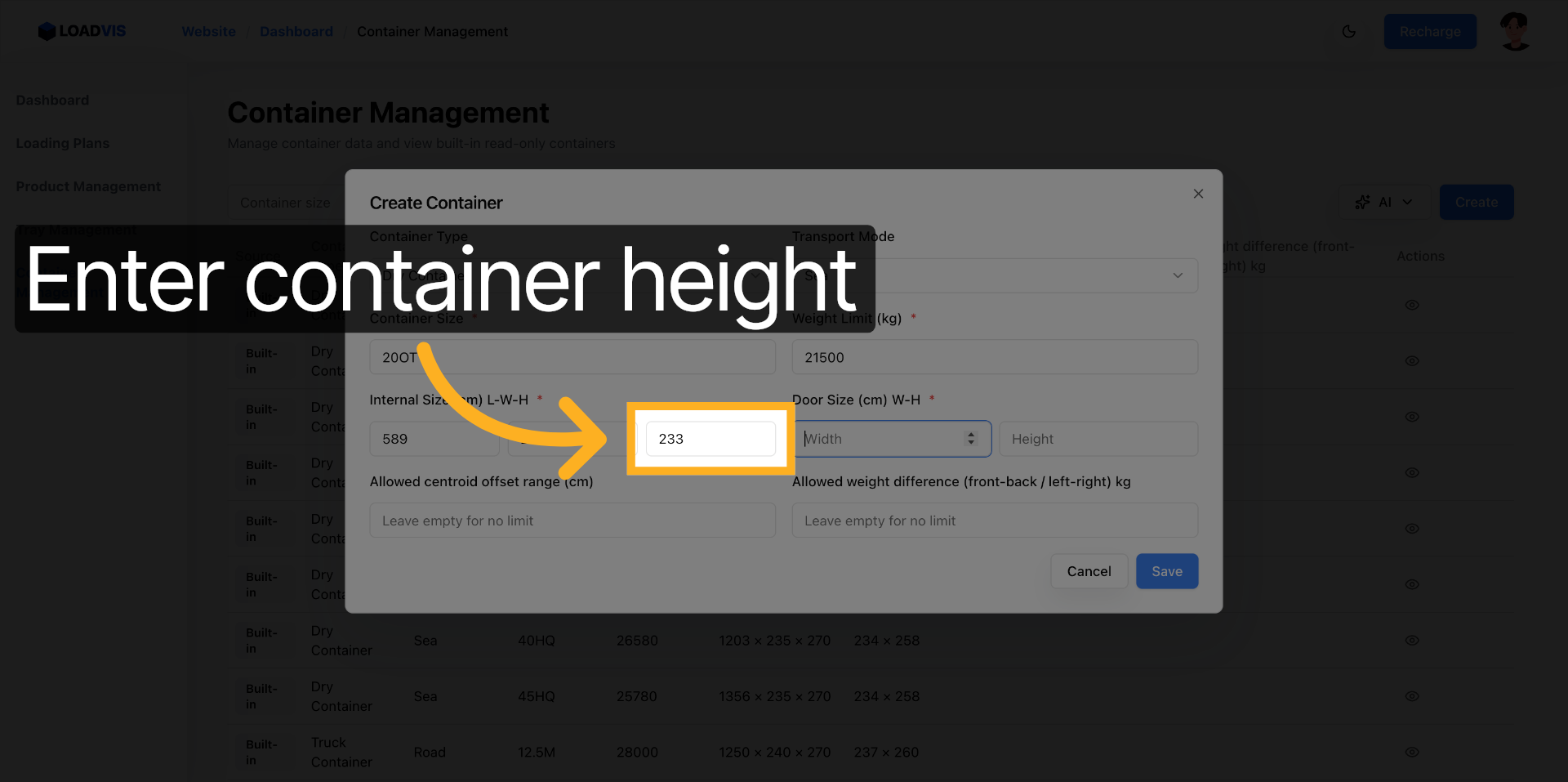
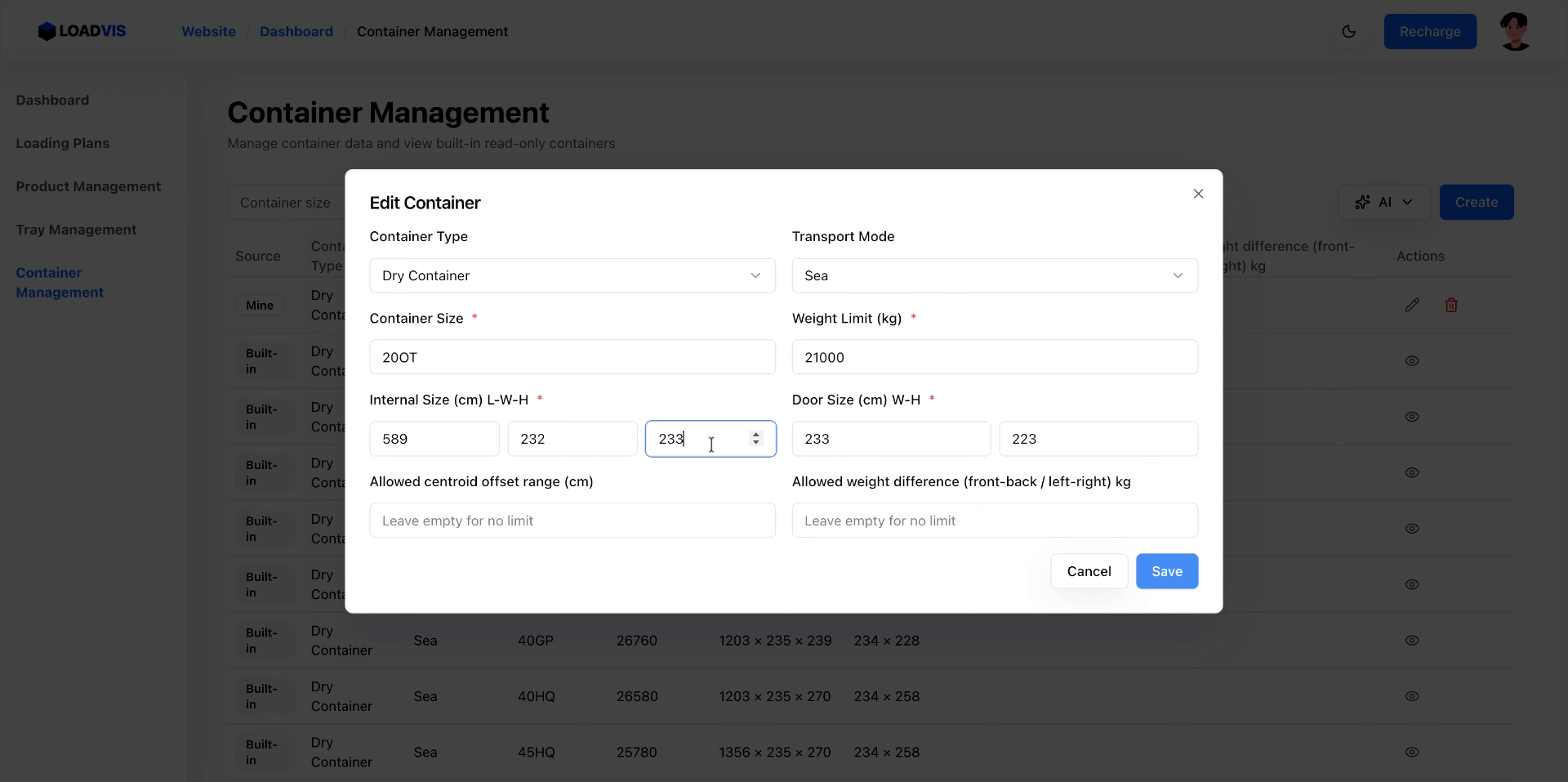
 内部長、内部幅、内部高を順に入力。
内部長、内部幅、内部高を順に入力。
 最も注意を要するのはドア開口寸法だ。物理的経路の上限を明示する。
最も注意を要するのはドア開口寸法だ。物理的経路の上限を明示する。
 「保存」を実行。システムがパラメータの整合性を検証し永続化する。
「保存」を実行。システムがパラメータの整合性を検証し永続化する。
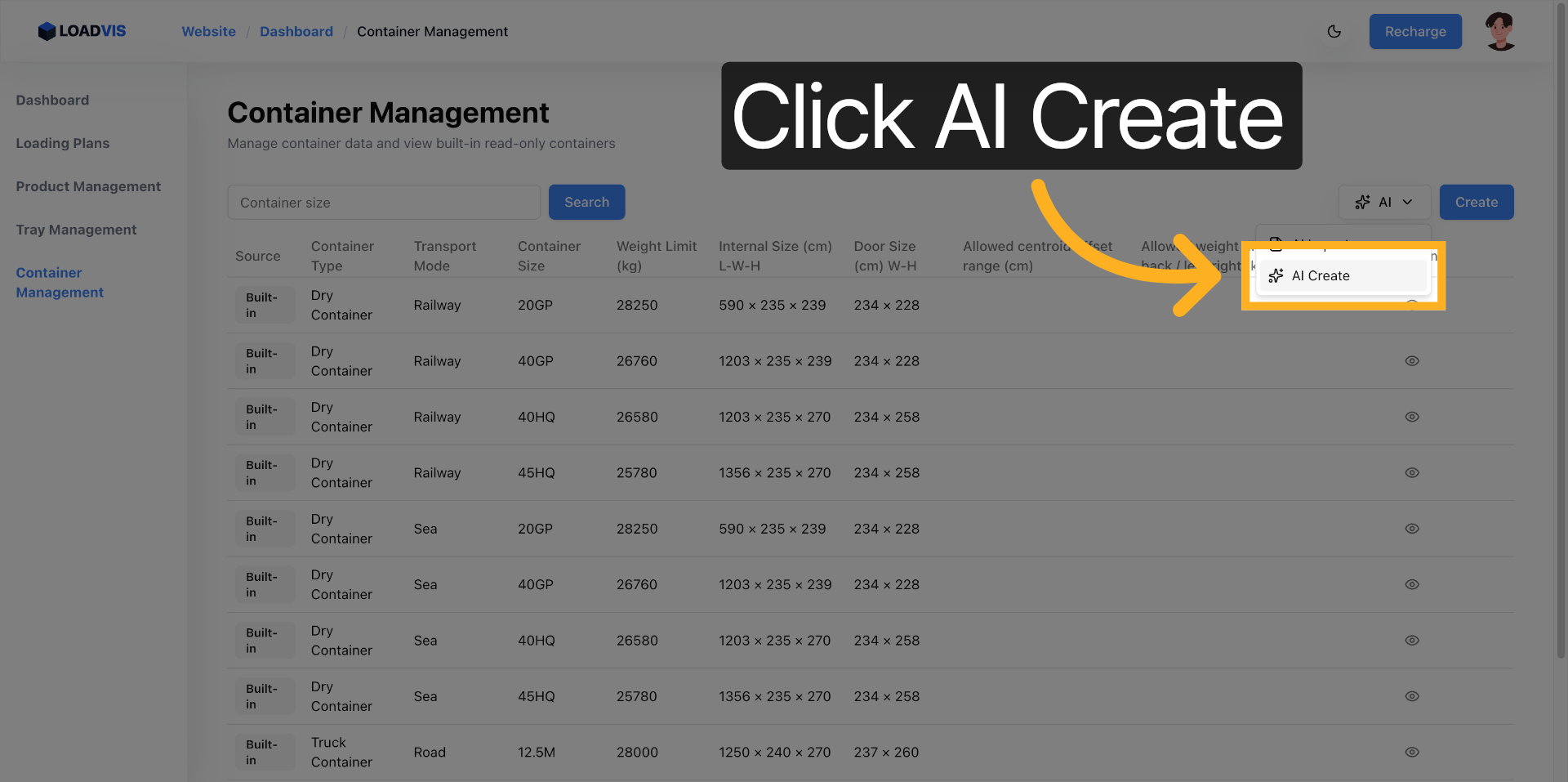
AI作成(aiCreate)による初期化と検証
 コンテナタイプを選択。
コンテナタイプを選択。
 「AI 作成」を起動。パーサーが自然言語の解析を開始する。
「AI 作成」を起動。パーサーが自然言語の解析を開始する。
 仕様テキストを入力例(
仕様テキストを入力例(20OT Max Weight: 21,500 kg Internal Dimensions: 589×232×233 cm Door Opening: 233×223 cm)のように構造化されていない文字列を流し込む。
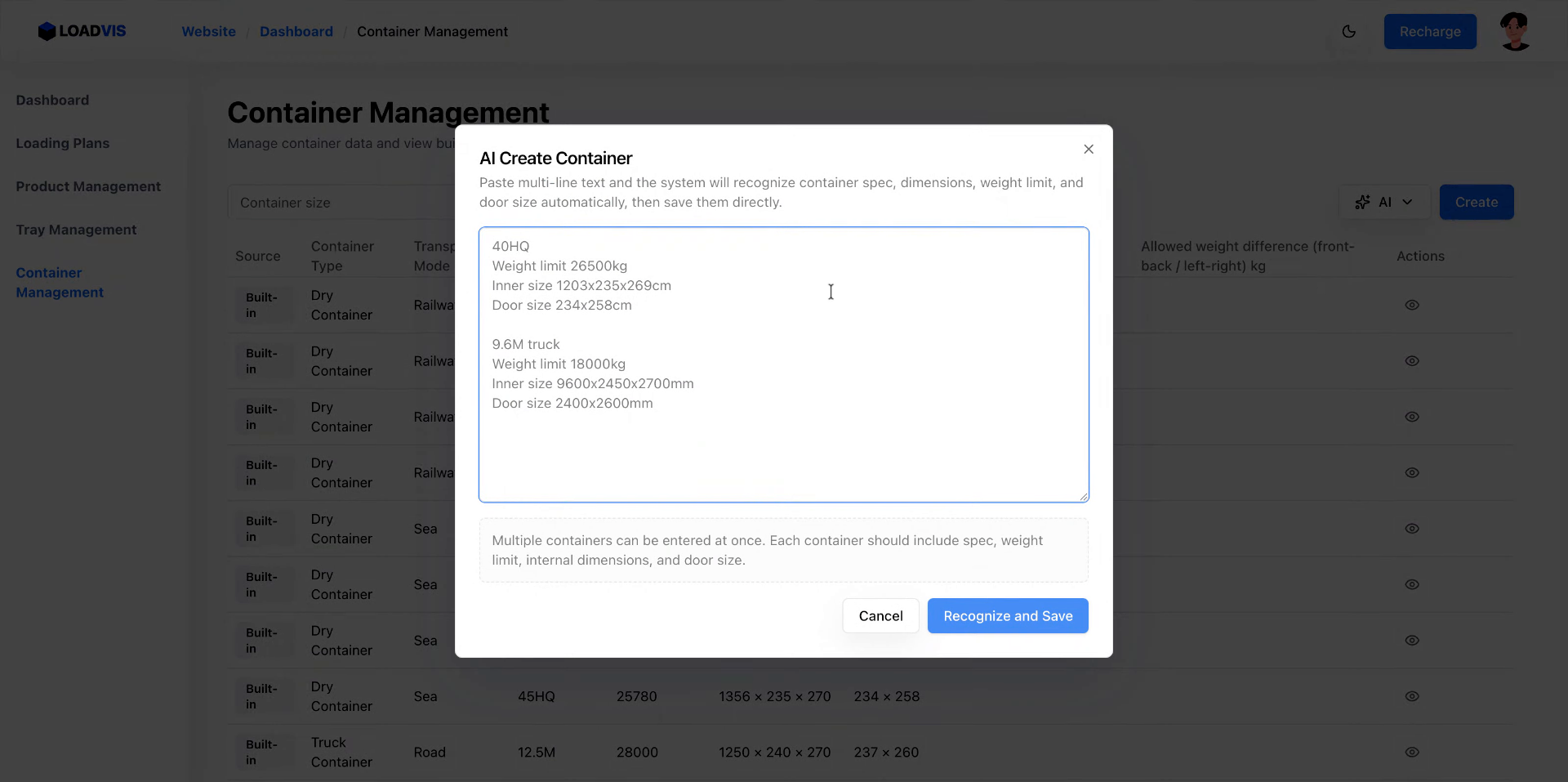 「認識して保存」を叩く。システムがパラメータをマッピングするが、ここで手を止める。
「認識して保存」を叩く。システムがパラメータをマッピングするが、ここで手を止める。
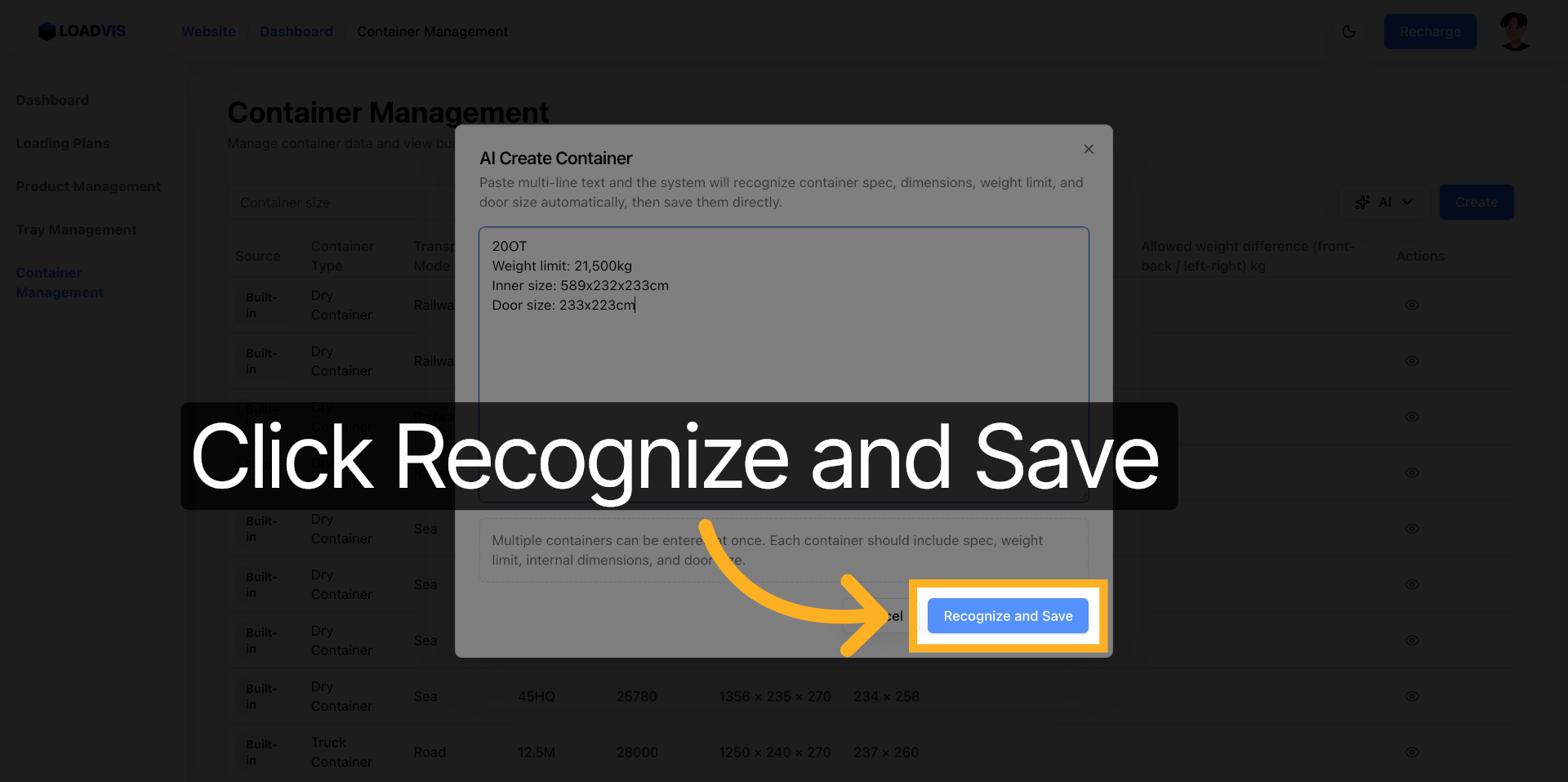 GIGO(Garbage In, Garbage Out)は不変の法則だ。AIが正規化した非対称寸法を、メジャーの実測値とクロスチェックする。保存は承認の後に行う。
GIGO(Garbage In, Garbage Out)は不変の法則だ。AIが正規化した非対称寸法を、メジャーの実測値とクロスチェックする。保存は承認の後に行う。
4. 間違ったアプローチ vs 確実なアプローチ
理論と実践の断絶は、アプローチの選択で決まる。
| 観点 | 間違ったアプローチ | 確実なアプローチ |
|---|---|---|
| パラメータ入力 | カタログ数値をそのままコピー。ドア寸法=内部寸法と仮定。AI抽出結果を無検証で保存。 | 現場実測値または運送会社提供の仕様書を使用。ドア寸法には5-10cmの安全クリアランスを明記。 |
| 重量管理 | 総重量制限のみを考慮。軸重や床面許容荷重はソルバー任せ。 | 重心偏差(Center of Gravity Deviation)上限を明示(例:前後±10%、左右±5%)。最大積載量には規制ベースの安全係数を適用。 |
| 実行検証 | 3Dアニメーションの「充填率」のみで判断。 | ガイドビューで積み込み順序と経路干渉を確認。実機試験や過去実績とのクロスチェックを実施。 |
間違ったアプローチを取る理由は「手間」だ。確実なアプローチは、初期設定に余計なサイクルを要求する。しかし、エラーが顕在化するタイミングは異なる。前者は「フォークリフトがドアに入らない」「軸重計で赤点灯する」段階で発覚する。後者は、既存データの検証と修正プロセスで未然に防ぐ。
検証と修正の実行プロトコル
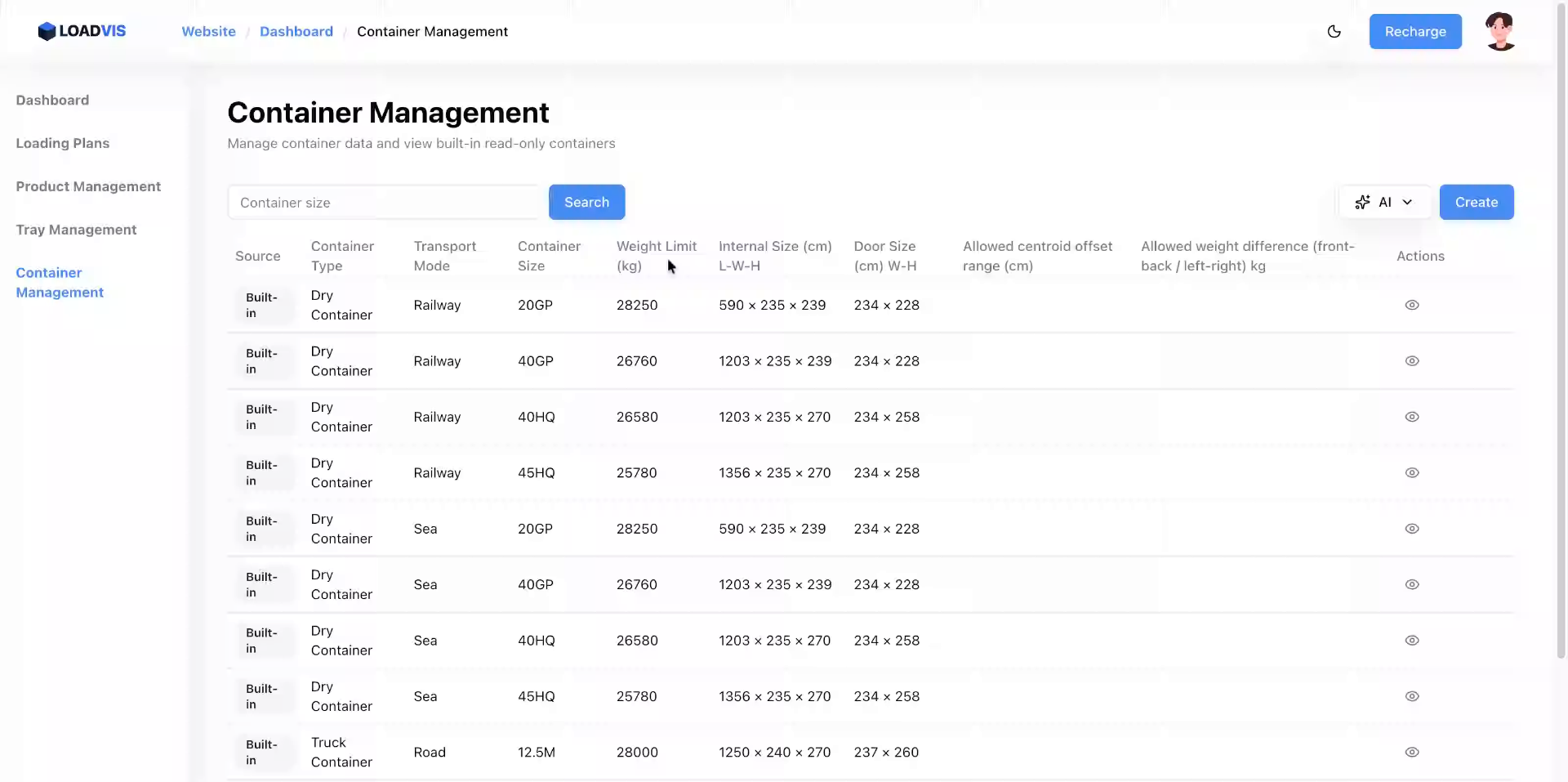
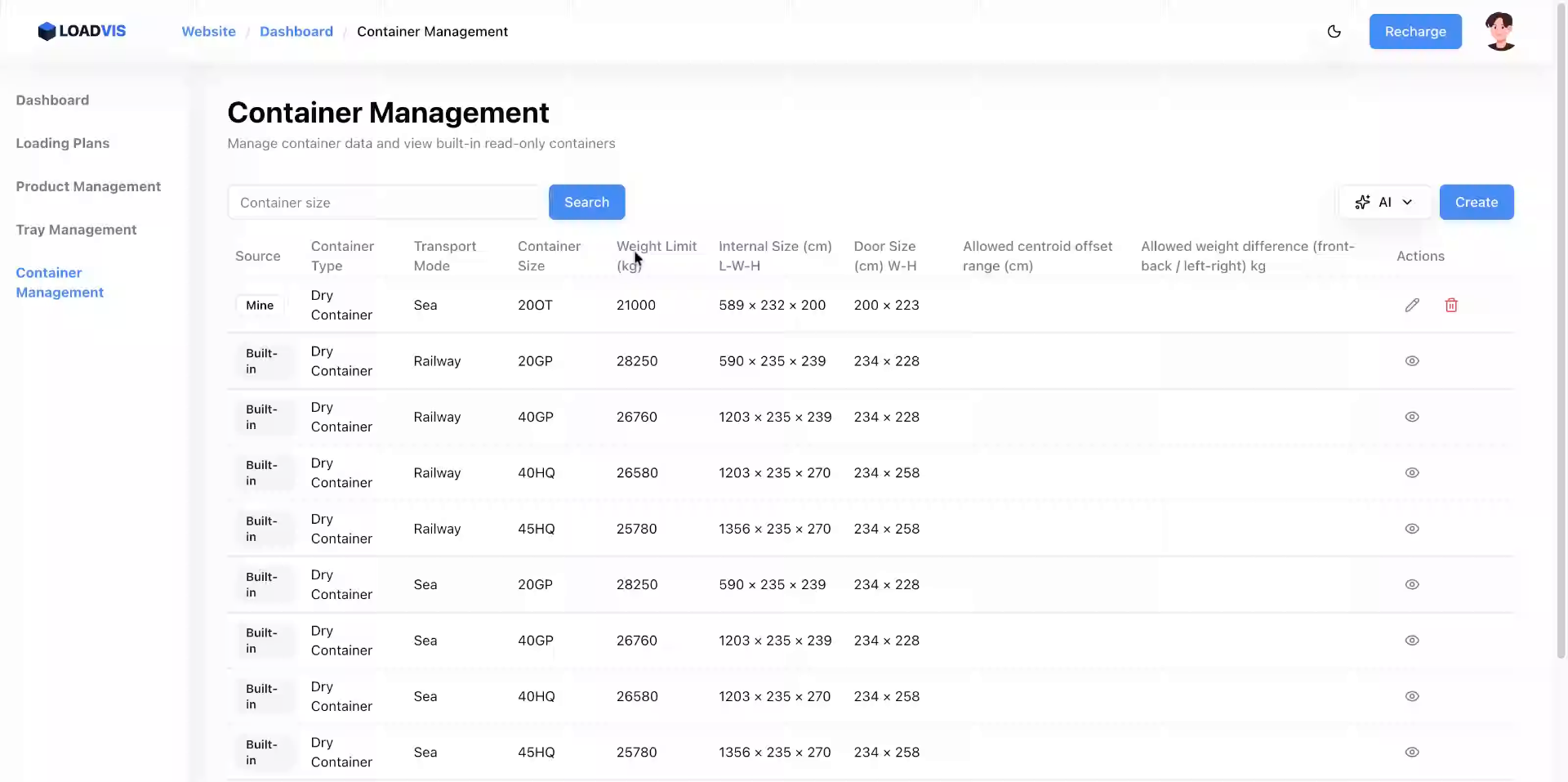
検索機能を活用し、対象コンテナの仕様履歴を抽出する。フィルタリングが最初の砦だ。
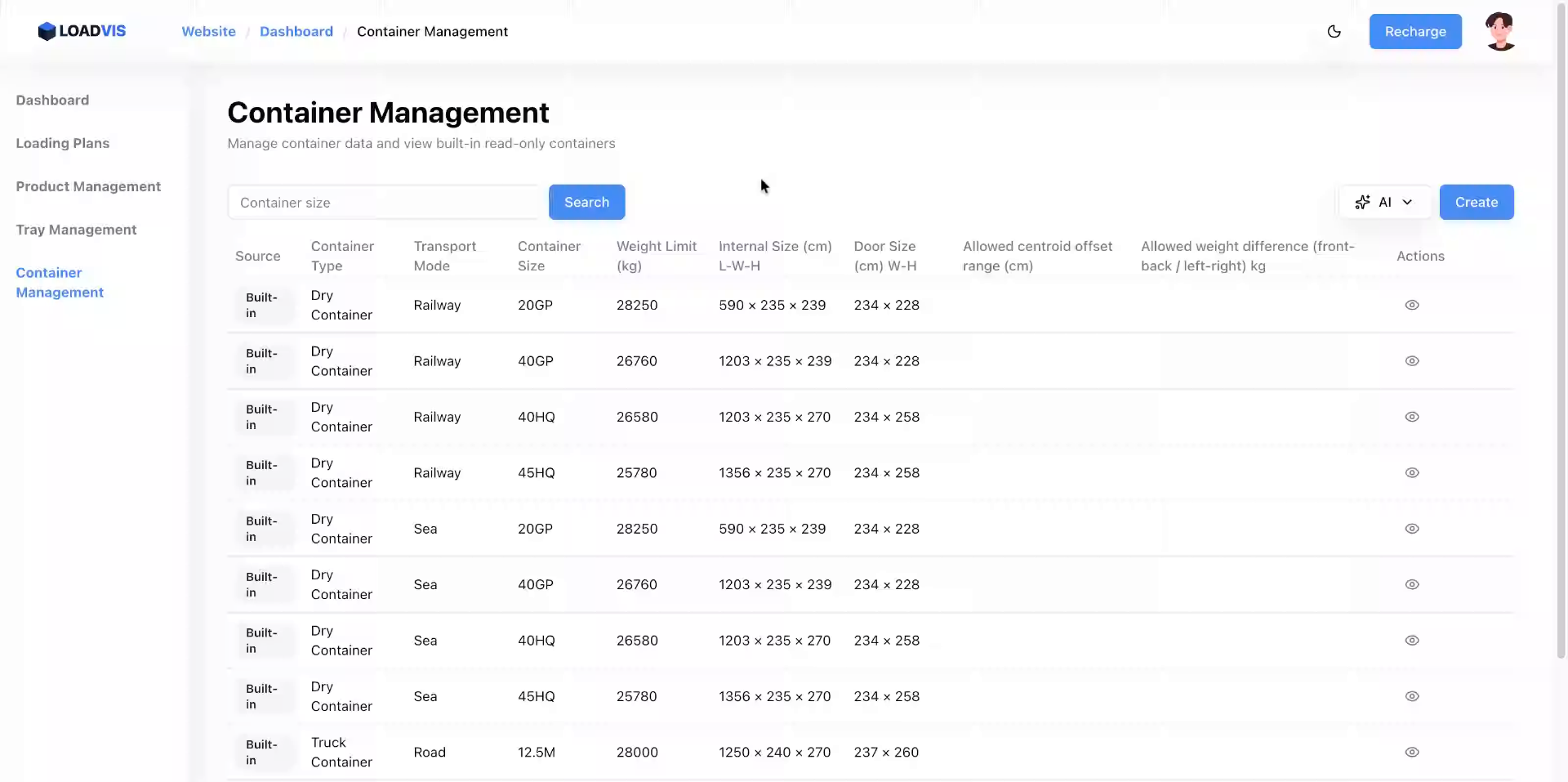 「コンテナ管理」へアクセス。
「コンテナ管理」へアクセス。
 「コンテナサイズ」フィルタを展開。
「コンテナサイズ」フィルタを展開。
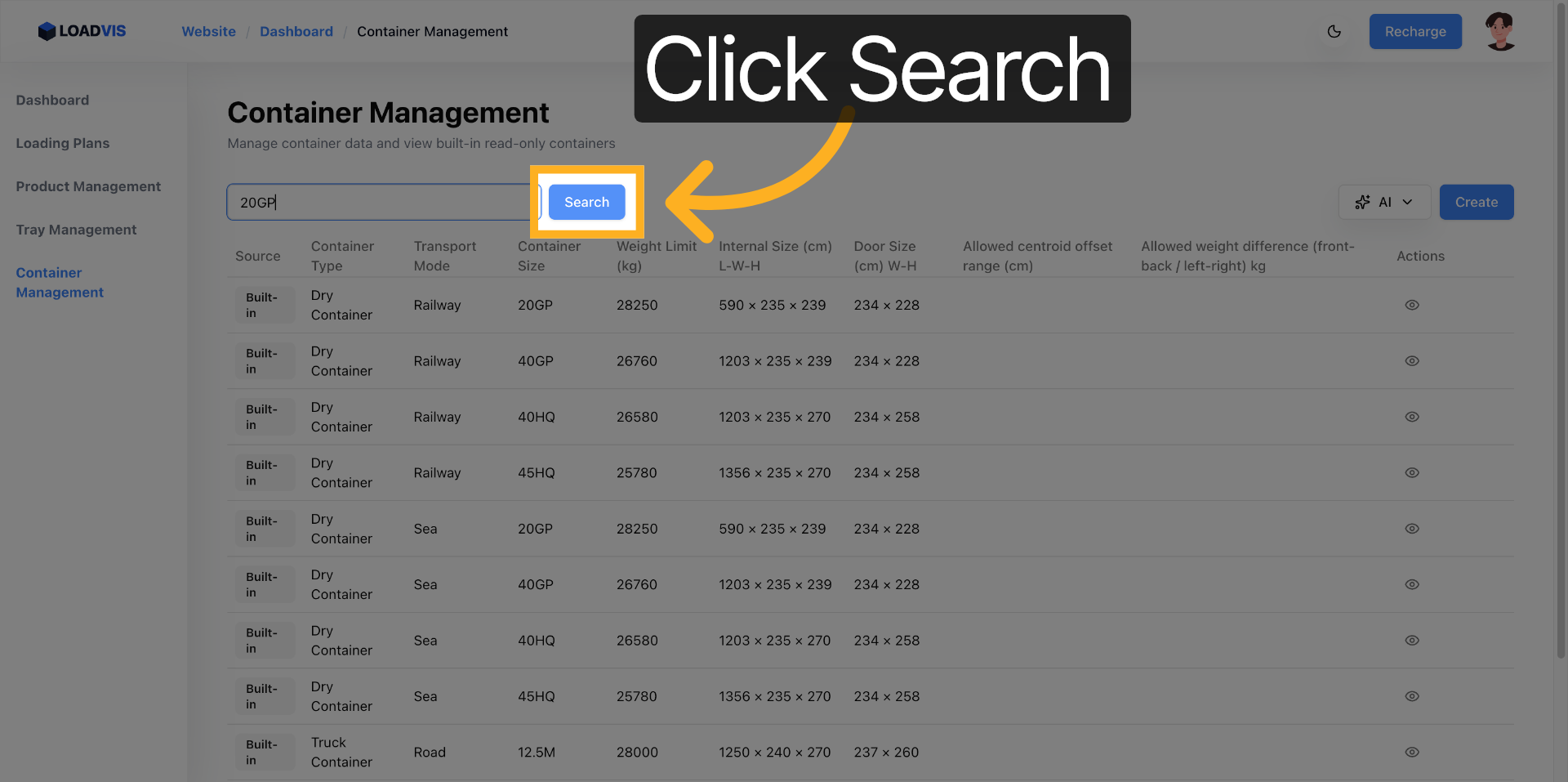
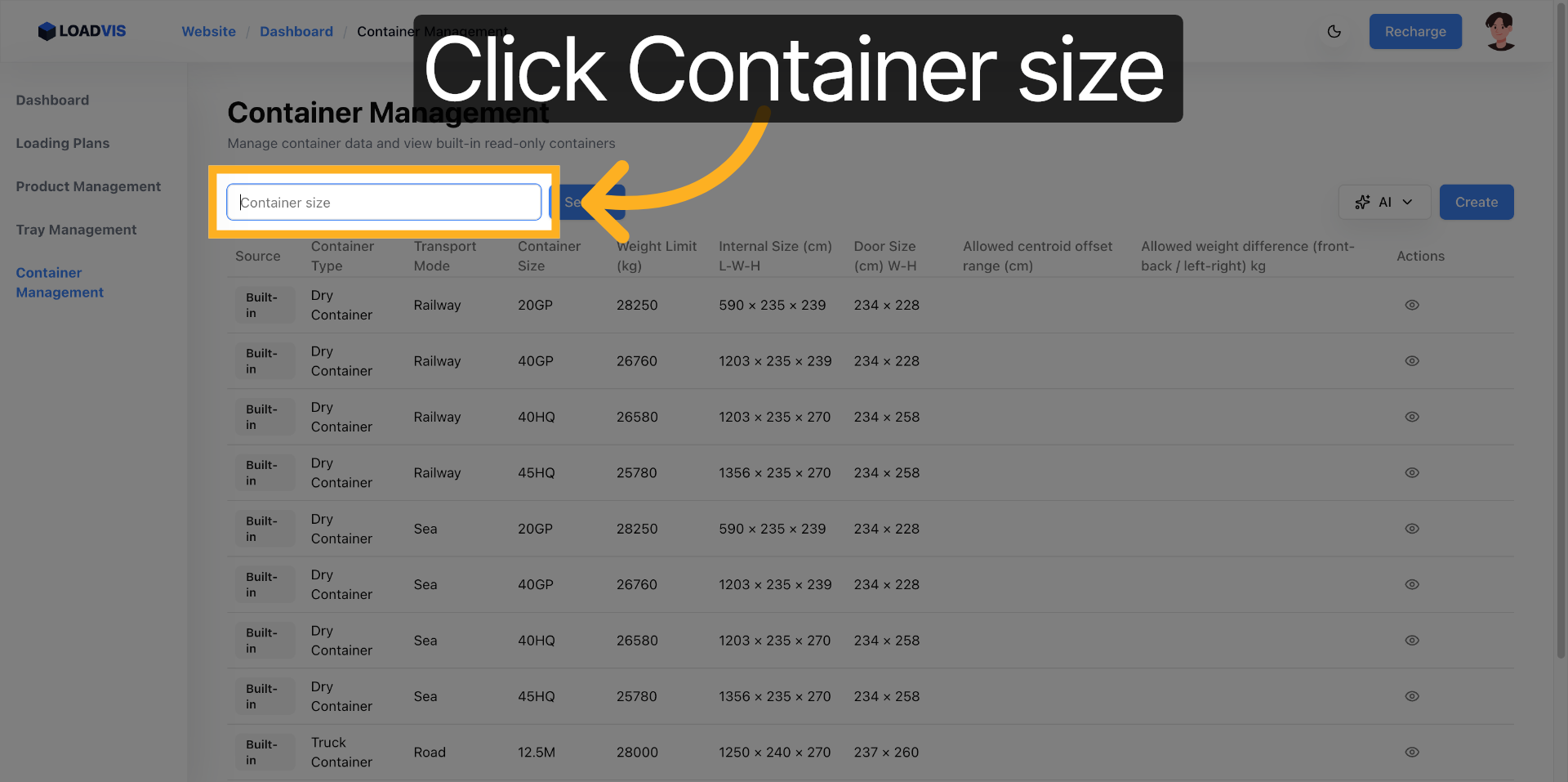 キーワード(例:
キーワード(例:20GP)を入力し照会対象を絞る。
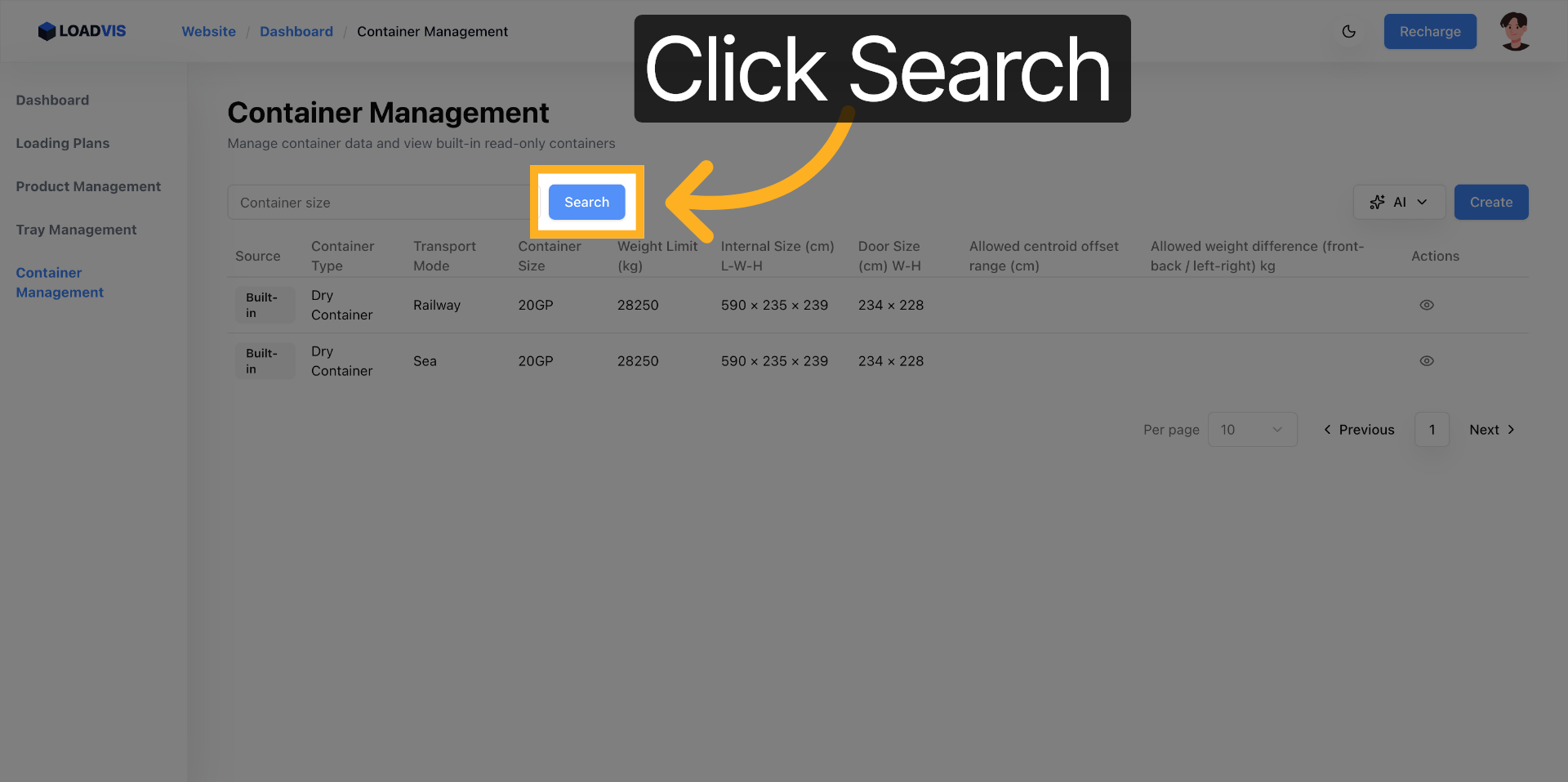
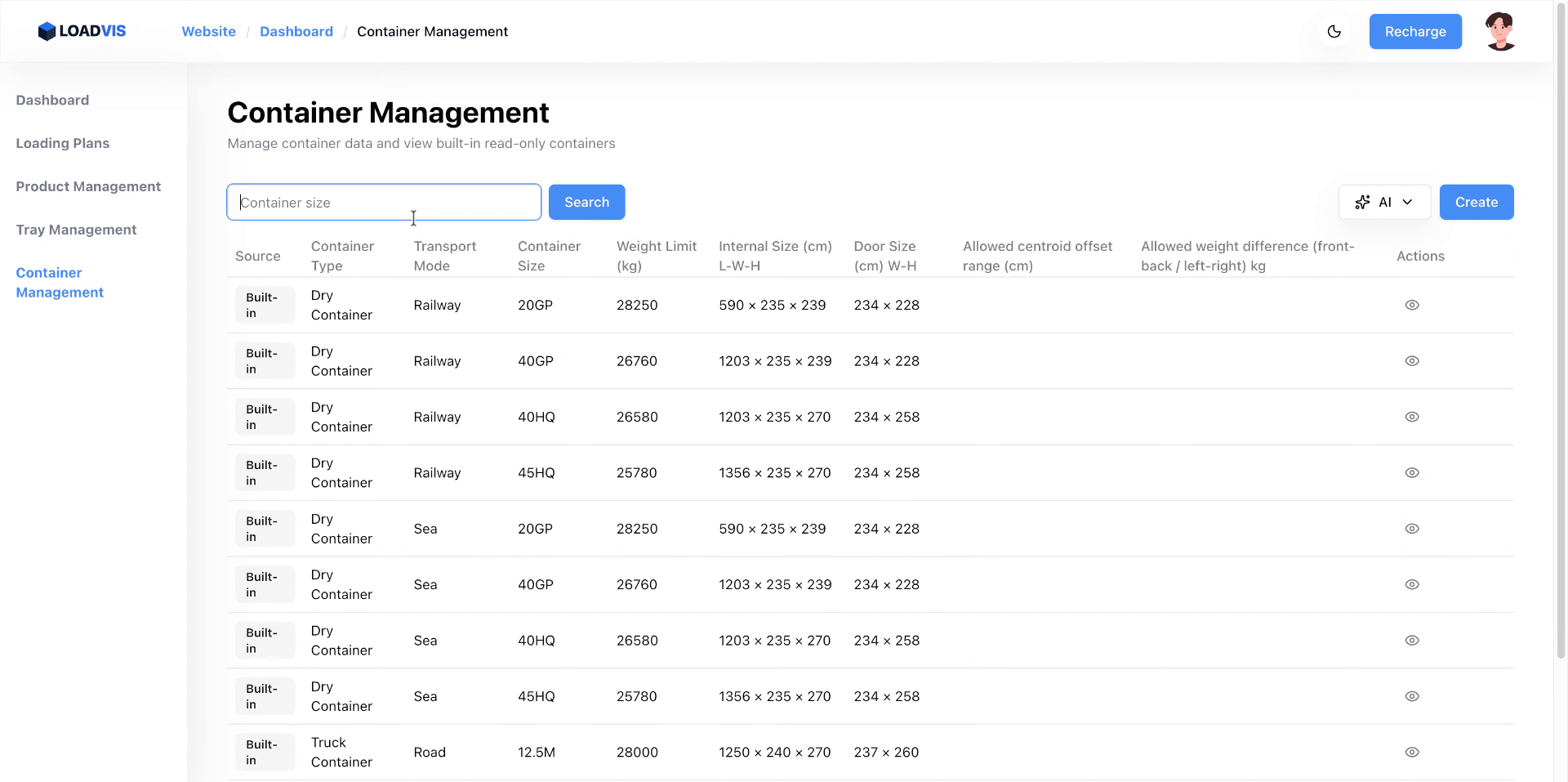 「検索」を実行。一致レコードを取得。
「検索」を実行。一致レコードを取得。
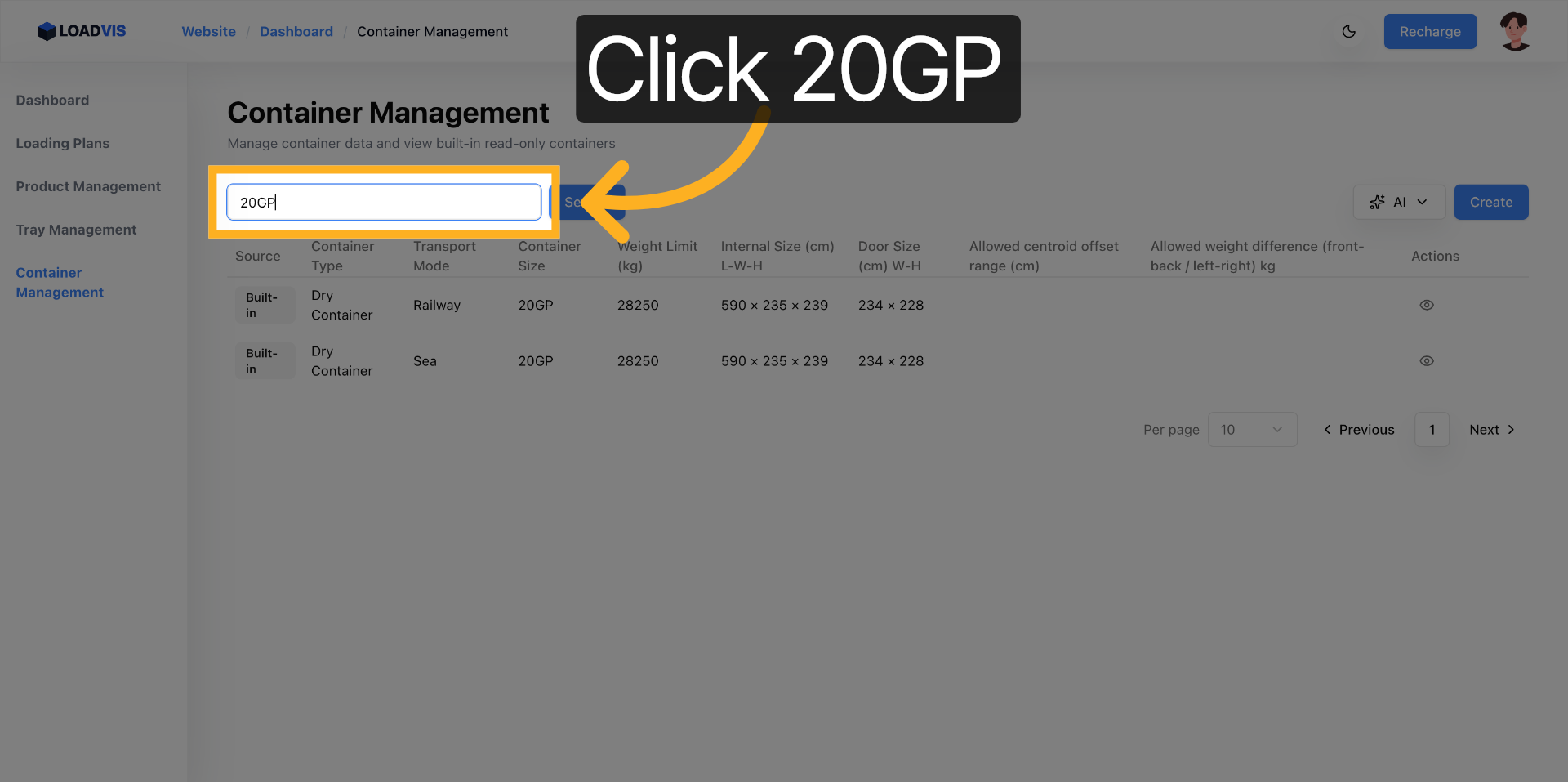
 リストから対象エントリをクリックし選択状態を確定する。
リストから対象エントリをクリックし選択状態を確定する。
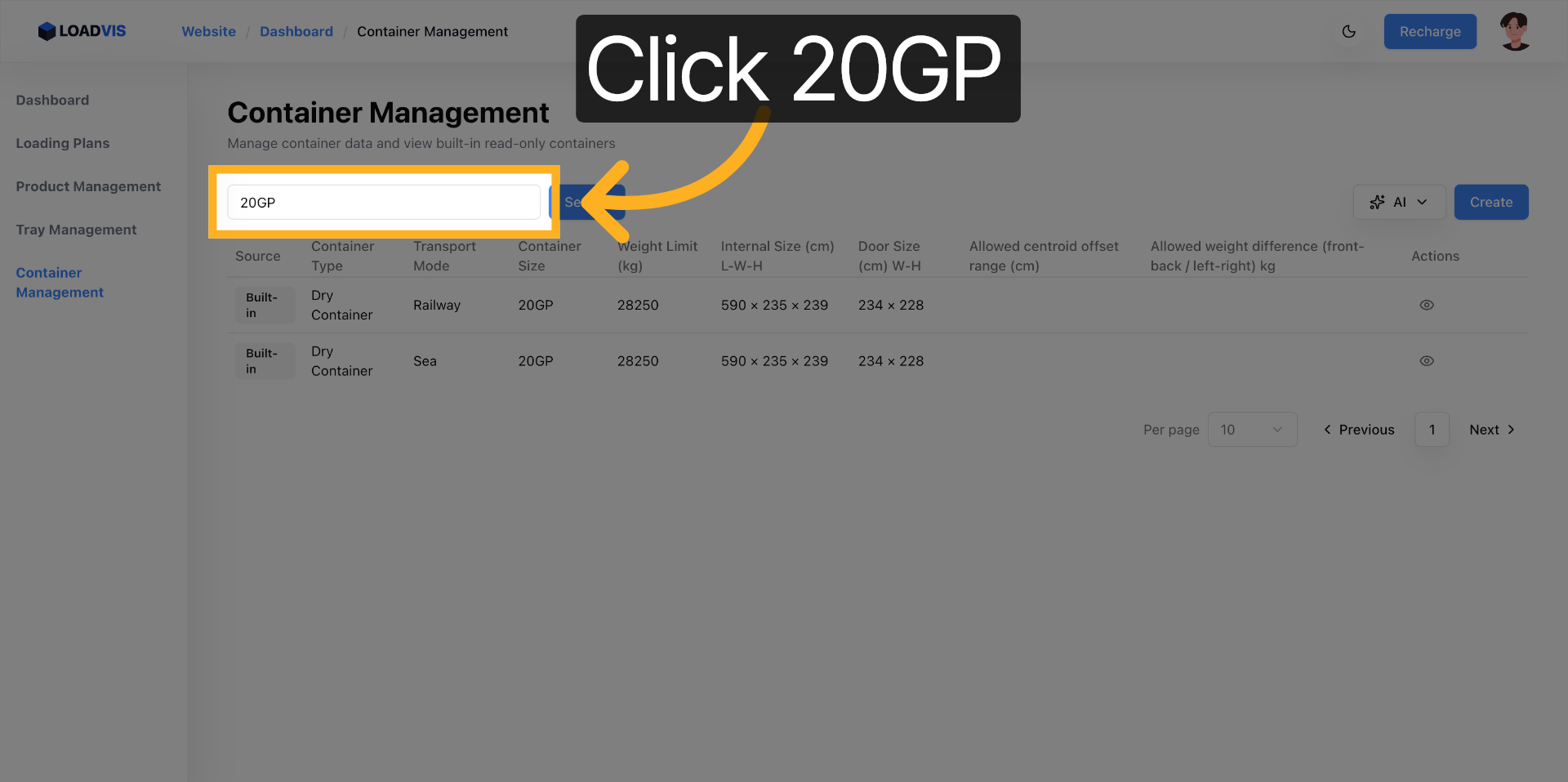 選択の重複確認を行うことで、誤操作を遮断する。
選択の重複確認を行うことで、誤操作を遮断する。
 条件が不明瞭な場合、フィルタキーワードを再入力し検索範囲を調整する。
条件が不明瞭な場合、フィルタキーワードを再入力し検索範囲を調整する。
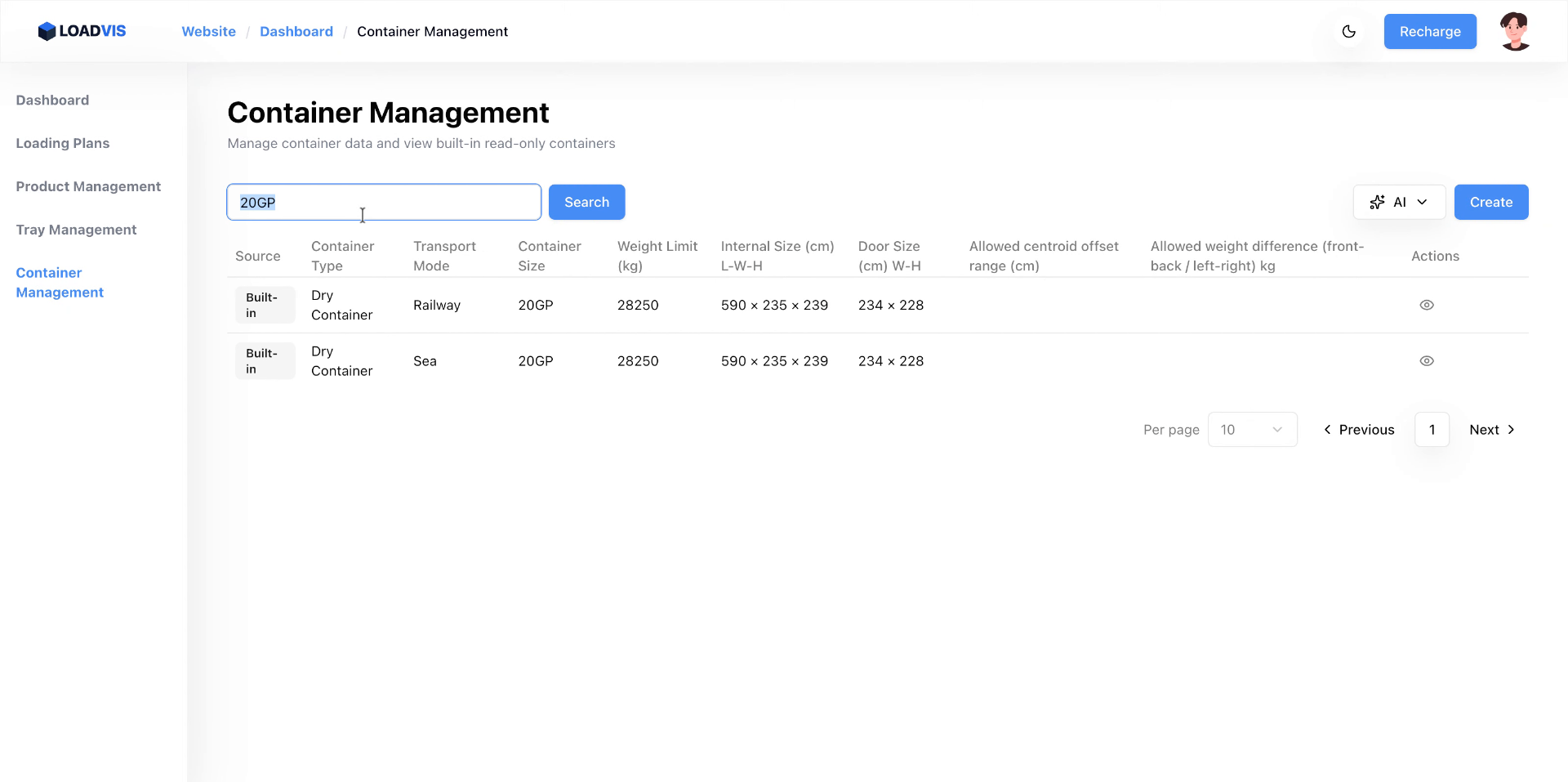 「検索」を再実行。条件に基づく再照会を行う。
「検索」を再実行。条件に基づく再照会を行う。
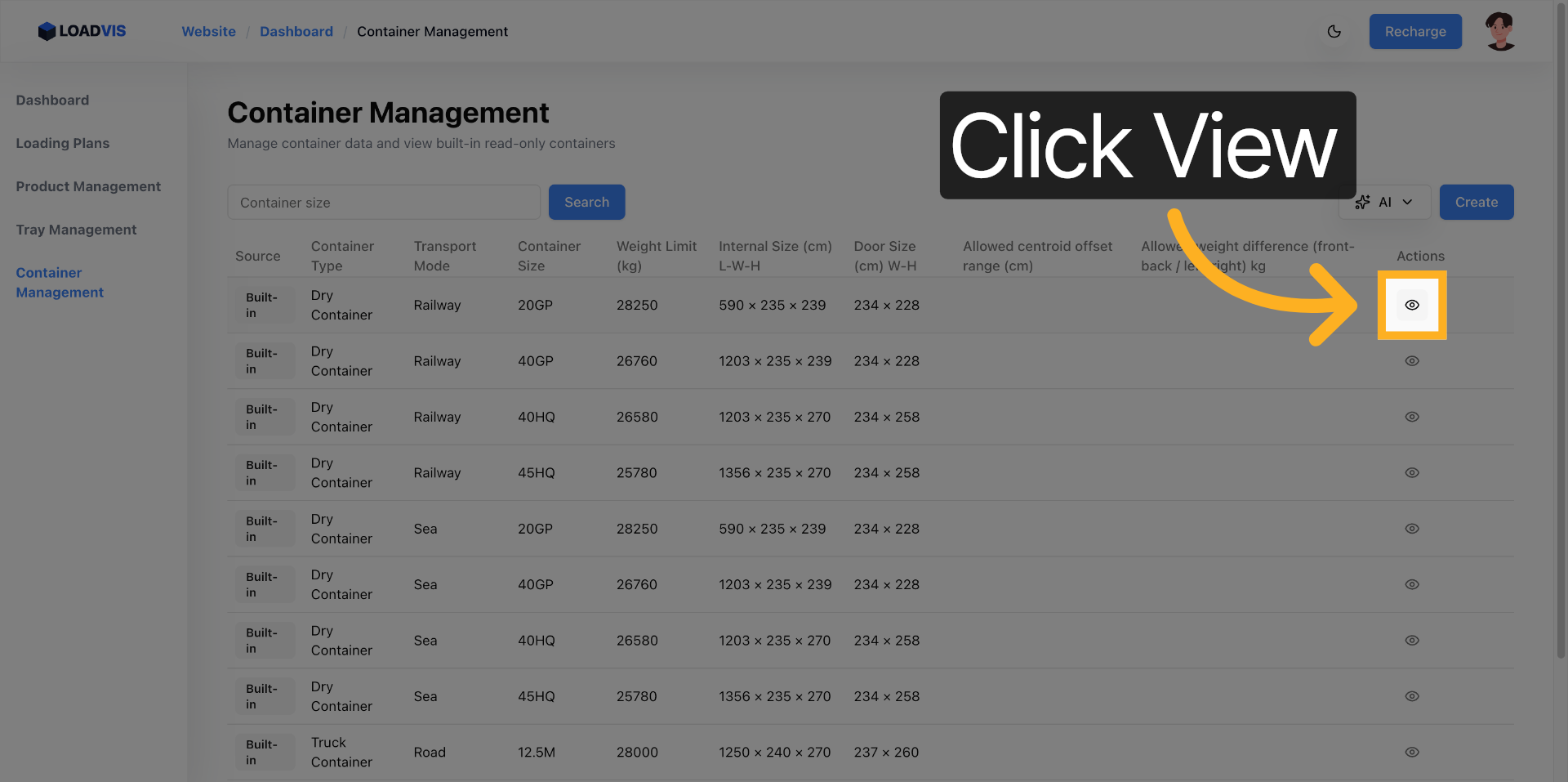
 「表示」ボタンで詳細パラメータを展開。実測値との差異を目視検知する。
「表示」ボタンで詳細パラメータを展開。実測値との差異を目視検知する。
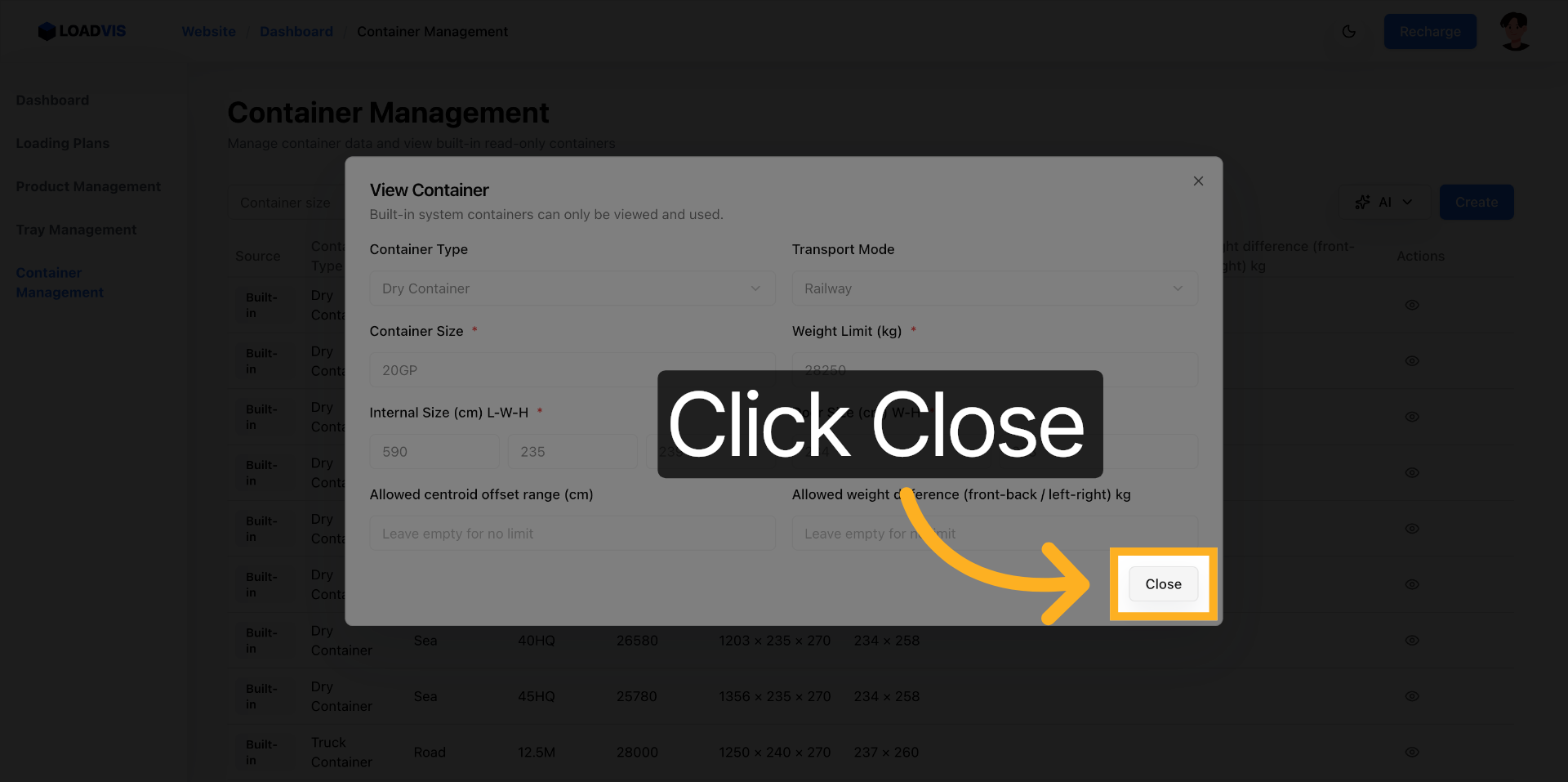
 検証完了後「閉じる」でリストビューへ戻る。
検証完了後「閉じる」でリストビューへ戻る。
差異が閾値を超えた場合、編集モードへ移行する。
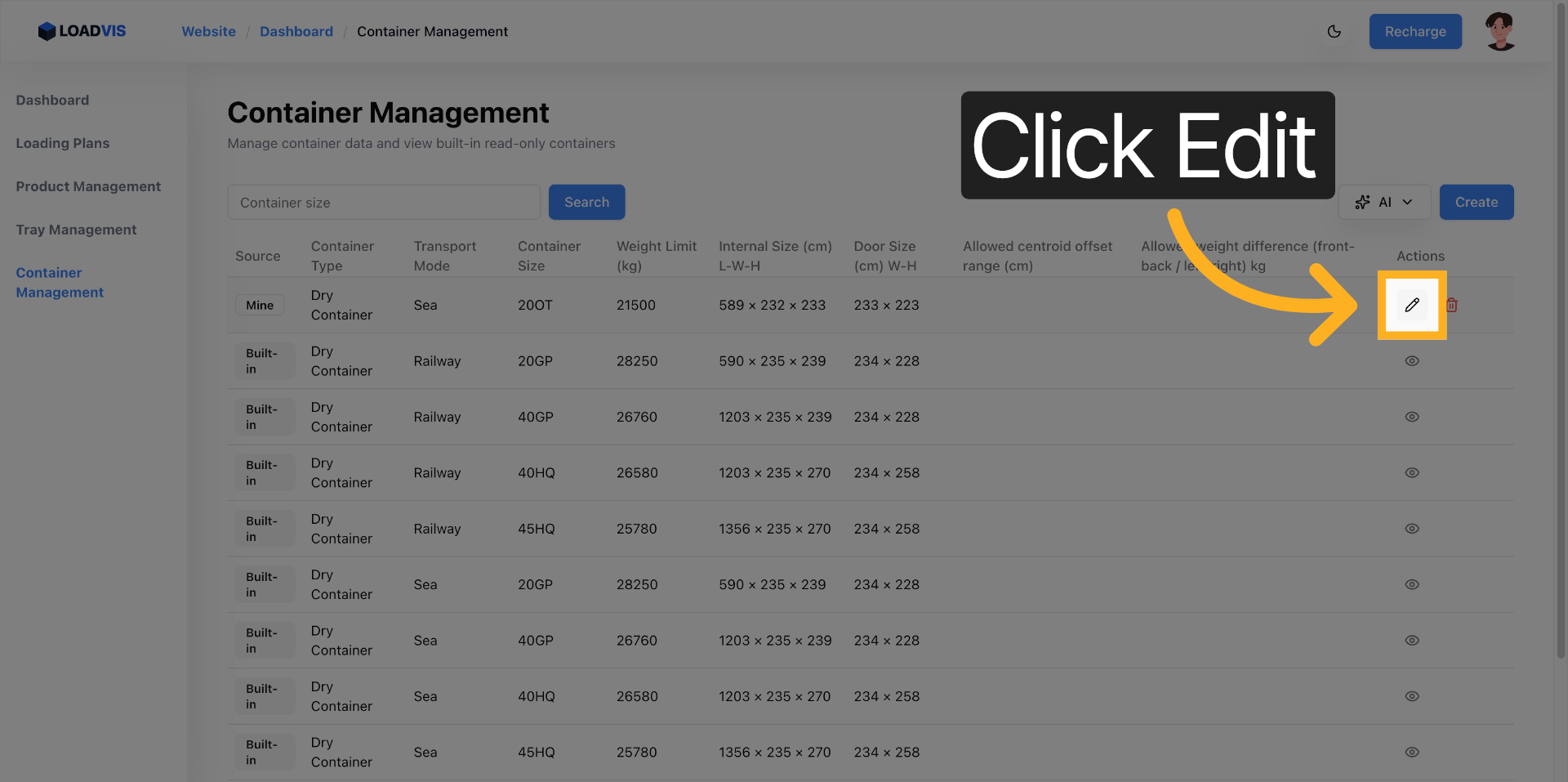
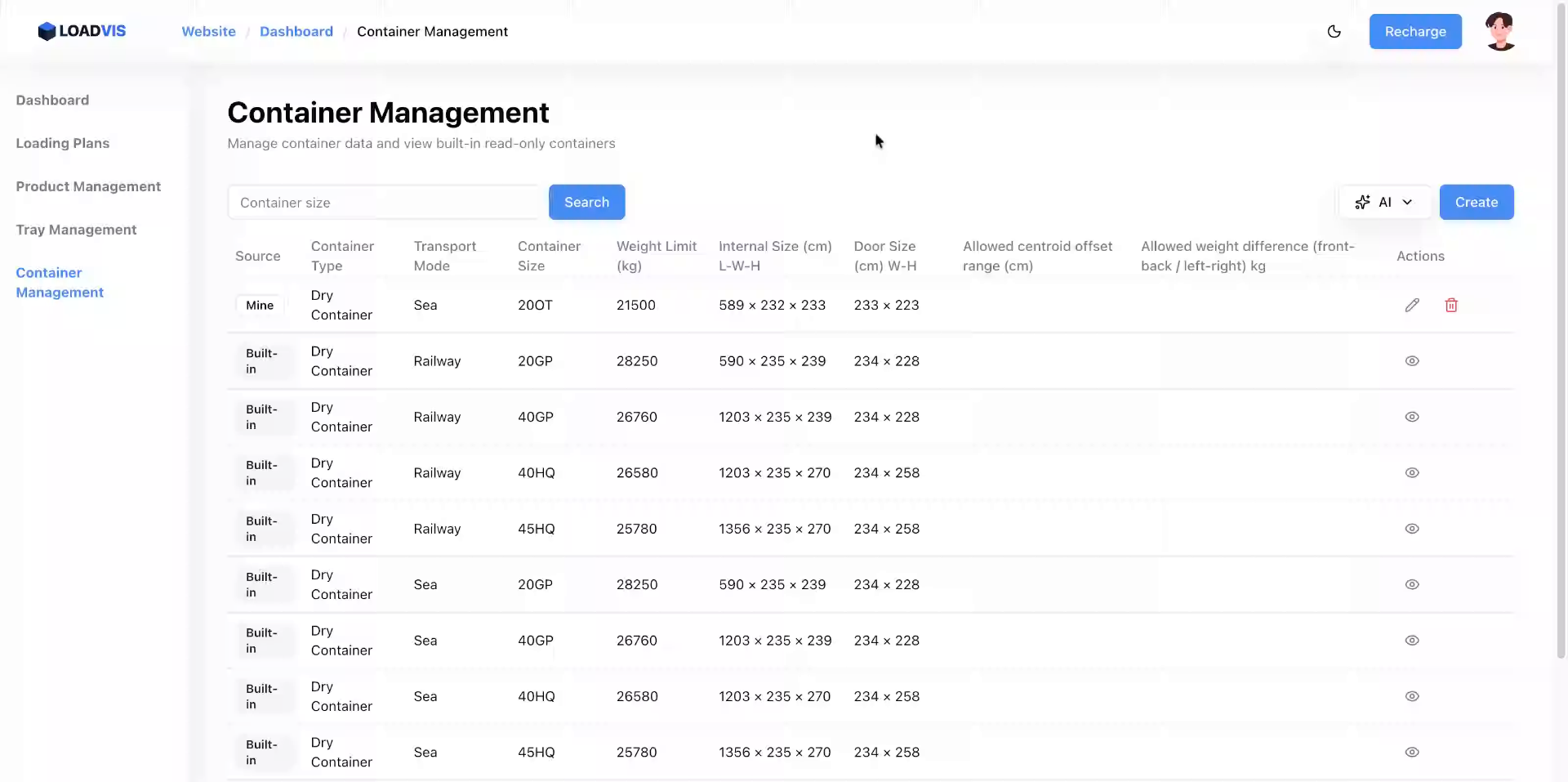 対象行の「編集」を起動。書き込みアクセスを開放。
対象行の「編集」を起動。書き込みアクセスを開放。
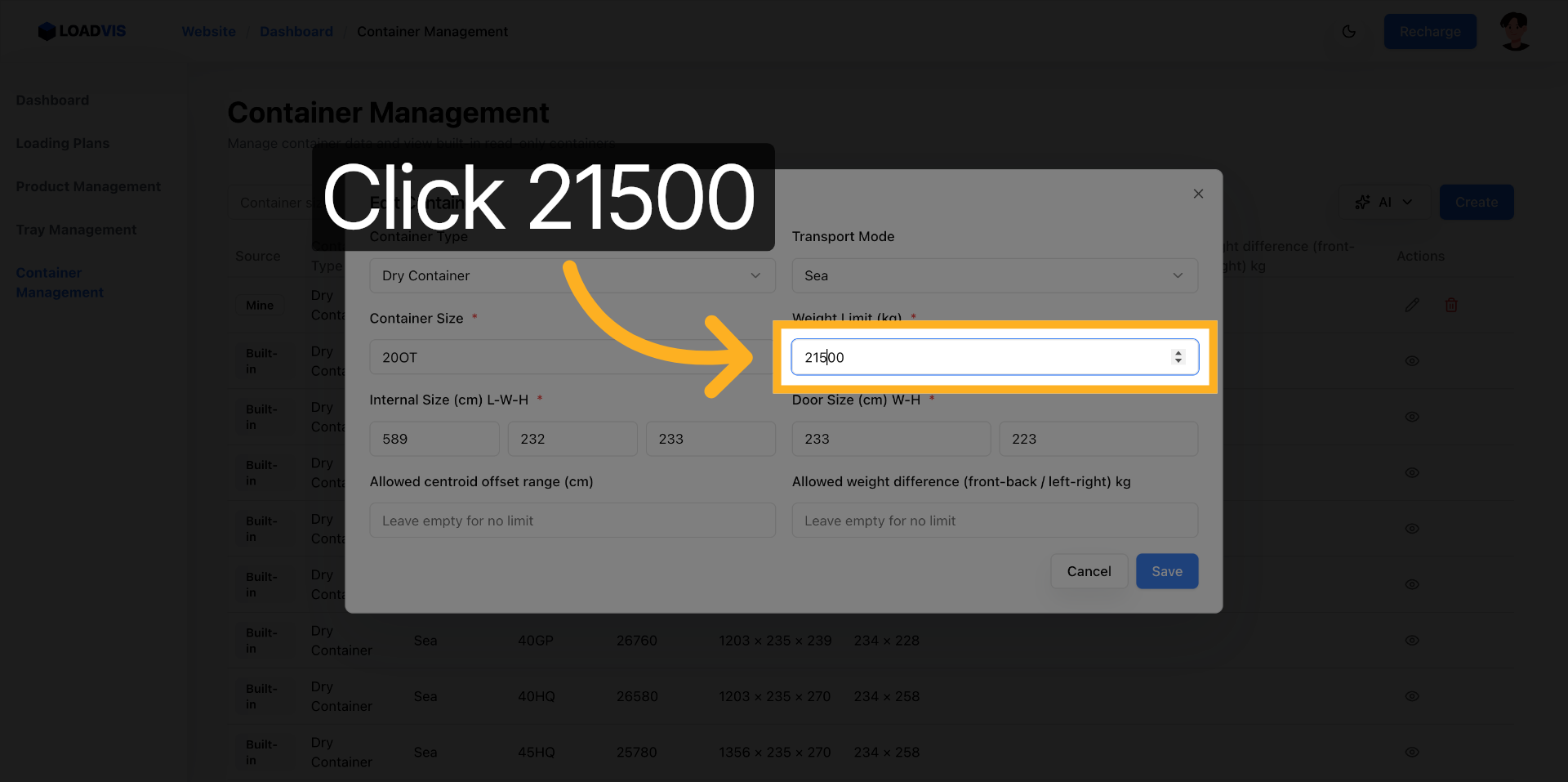
 積載量フィールドを選択。
積載量フィールドを選択。
 値をクリアし、規制ベースの安全係数を反映した新値(例:
値をクリアし、規制ベースの安全係数を反映した新値(例:21000)を入力。
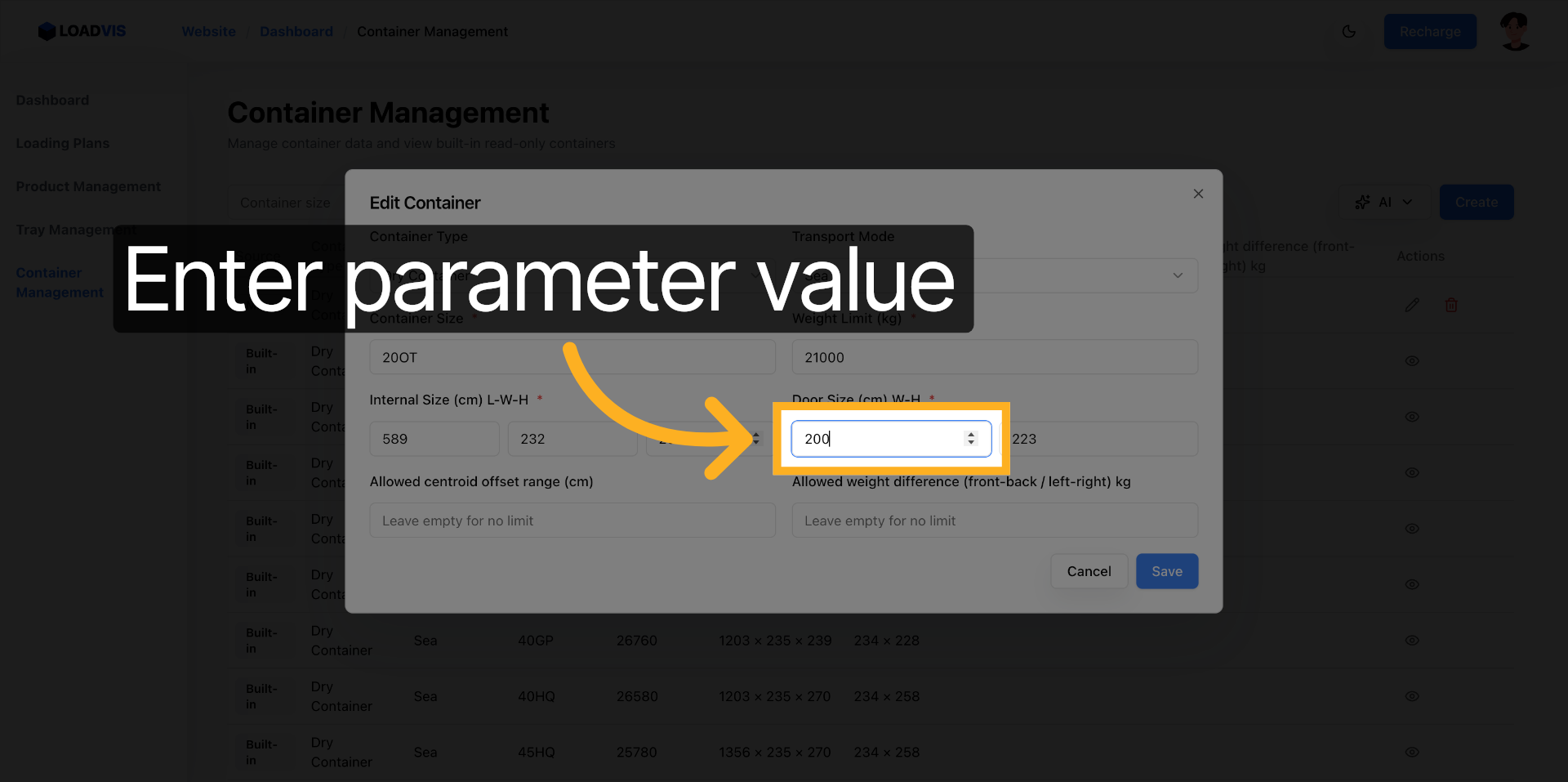
 ドア開口部の高さを選択。
ドア開口部の高さを選択。
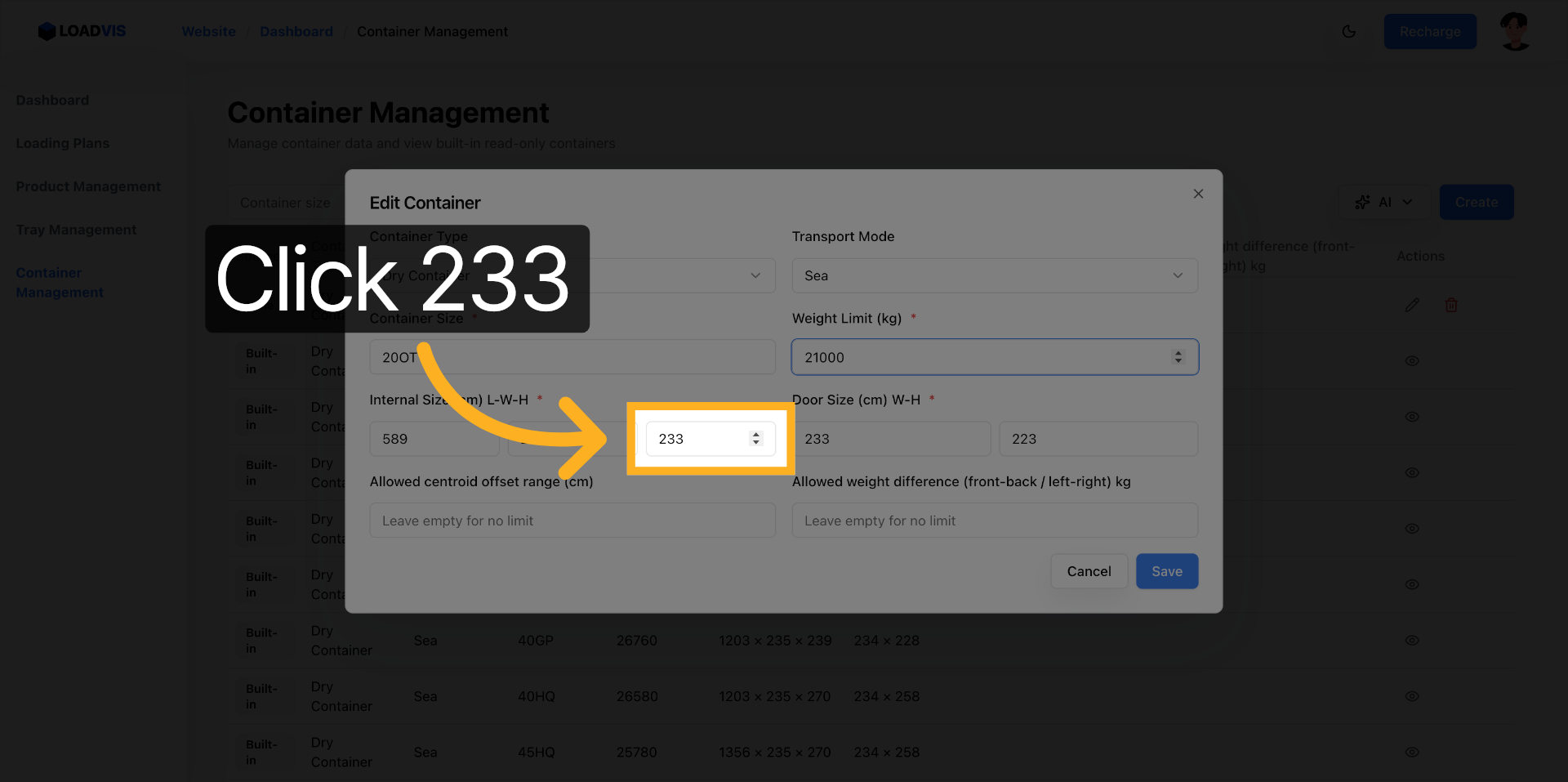 実測値(例:
実測値(例:200)へ下方修正。
 幅パラメータを補正。
幅パラメータを補正。
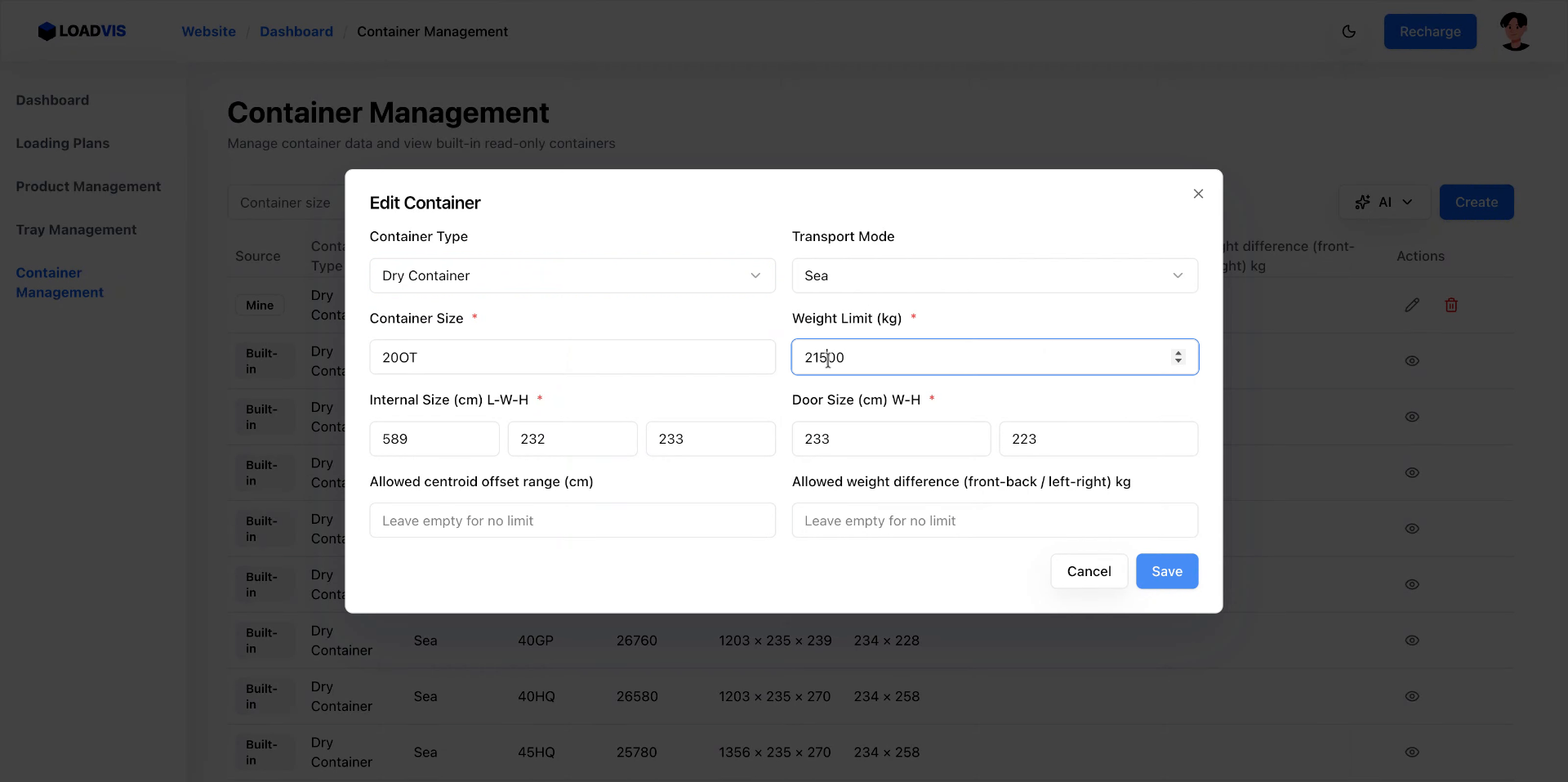
 「保存」で更新を確定。システムが再検証する。
判断基準は明確だ。数値が物理的干渉を生まず、法規制の閾値を下回り、かつ実作業のリードタイムを圧迫していないか。これを三叉路で検証する。
「保存」で更新を確定。システムが再検証する。
判断基準は明確だ。数値が物理的干渉を生まず、法規制の閾値を下回り、かつ実作業のリードタイムを圧迫していないか。これを三叉路で検証する。
5. ツールの補助範囲と手動確認の境界
最適化プラットフォームは万能ではない。組み合わせ爆発に対する計算の肩代わりであり、干渉判定のフレームワークを提供するに過ぎない。ツールが手堅く処理する領域は、寸法・重量・積重ネ制限の多重制約下における幾何的最適解の提示、経路干渉の自動検出、計画バージョンの管理と再計算、そして明細のExcel/ZIPエクスポートである。
対して、アルゴリズムの定義域外に放置される変数がある。コンテナ個体のへこみ、包装材の実際の圧縮率と静摩擦係数、現場のフォークリフトのリーチ長や旋回半径、地域固有の港湾制限、作業員の習熟度と標準作業時間。これらはセンサーデータで逐次補完されない限り、静的なモデルから漏れ落ちる。手動確認が必須となる。
実寸合わせの仮置き(ドライラン)を実施する。梱包状態のバラつきを許容誤差としてパラメータに織り込む。不要になったテストデータや廃止予定の仕様の整理も、運用の健全性を保つために不可欠だ。
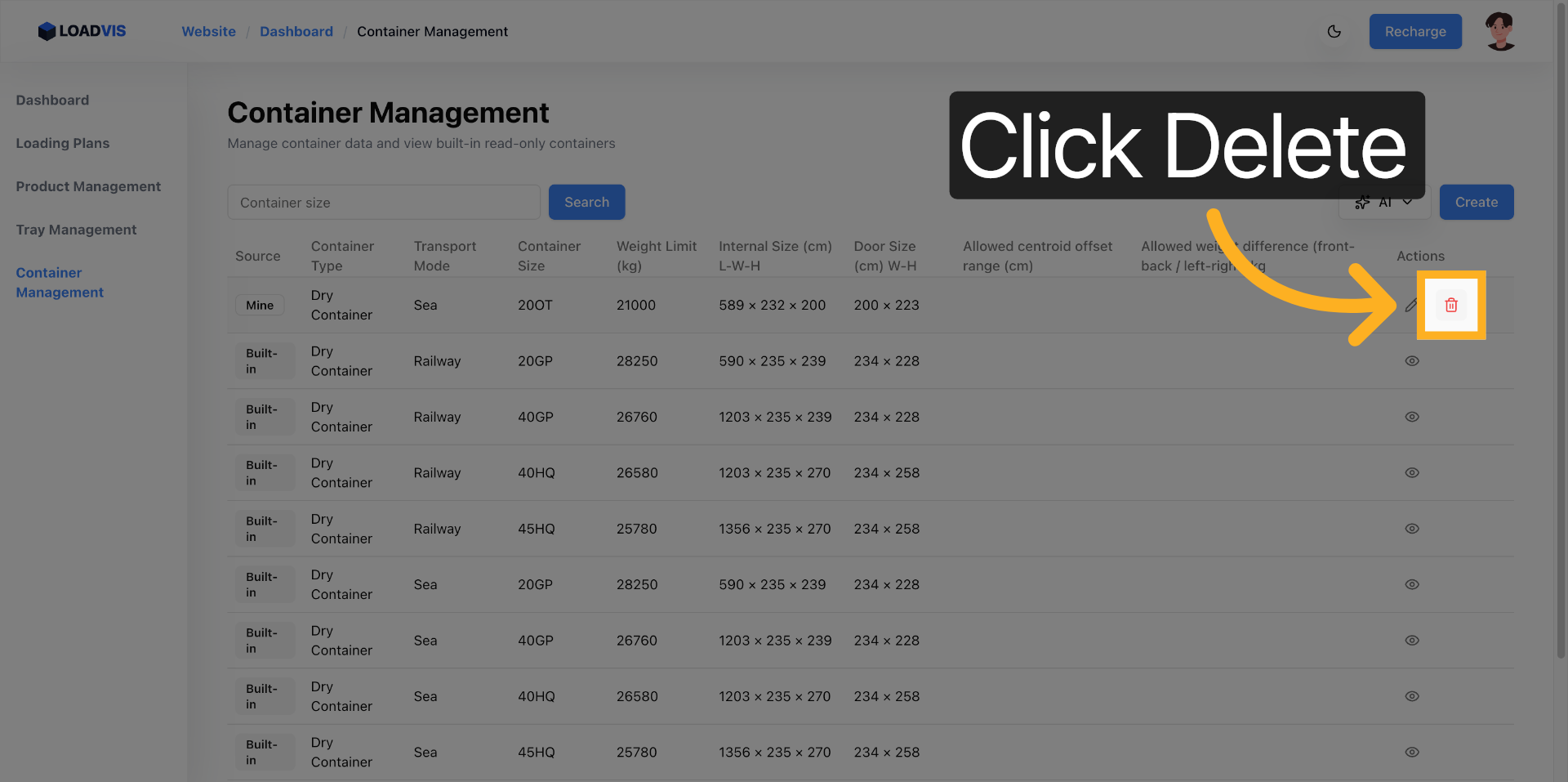
 対象行の「削除」を起動。
対象行の「削除」を起動。
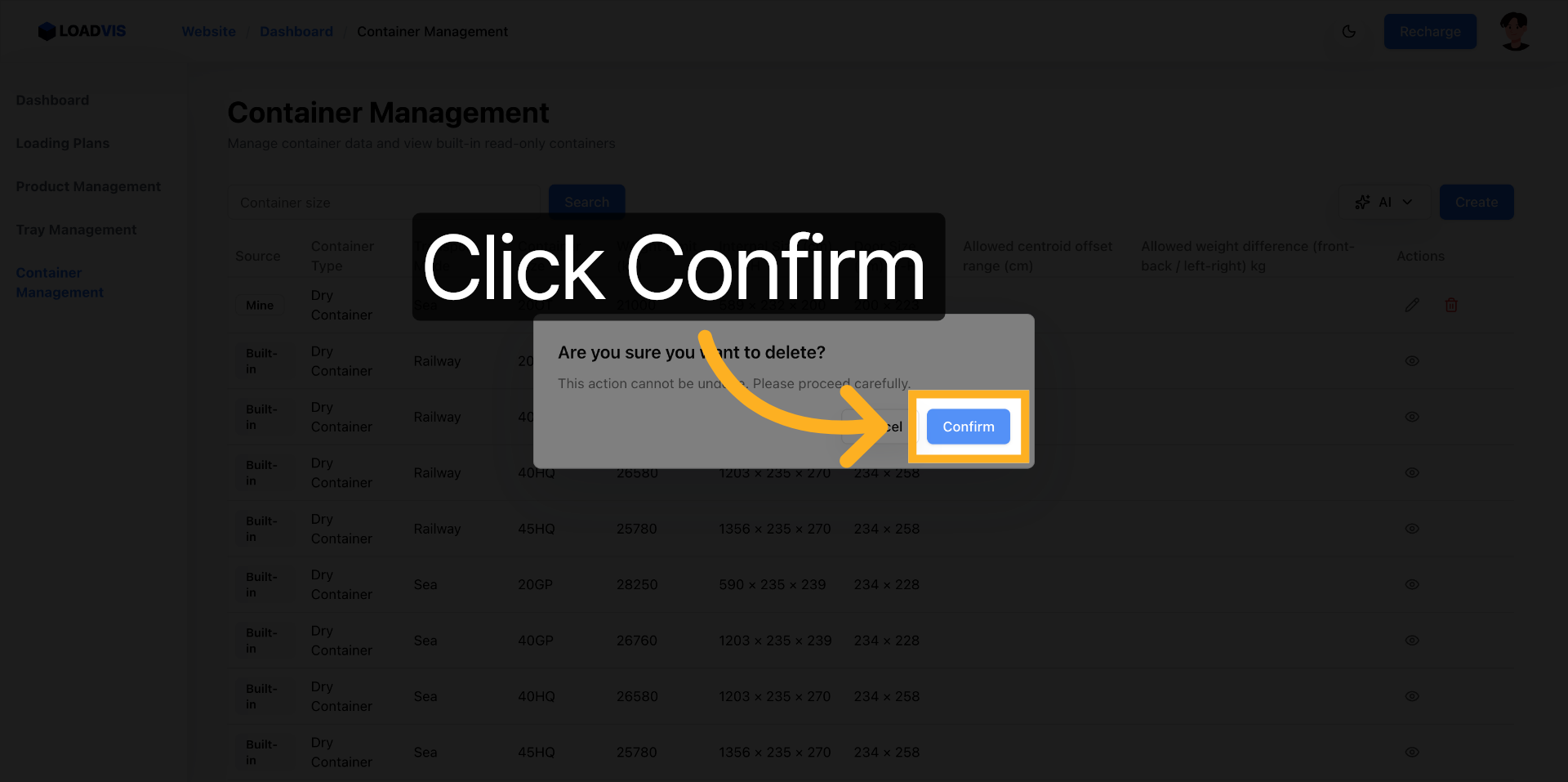
 確認ダイアログで誤削除を抑制。
確認ダイアログで誤削除を抑制。
 「確認」で永久的にレコードを抹消する。
「確認」で永久的にレコードを抹消する。
 ツールの出力は「提案」であり、現場の物理法則が最終承認権を持つ。この境界線を曖昧にすると、計画書はただの紙切れに堕する。
ツールの出力は「提案」であり、現場の物理法則が最終承認権を持つ。この境界線を曖昧にすると、計画書はただの紙切れに堕する。
6. 結び
積載計画の最適化は、演算速度の競争ではない。現実の制約をどれだけ忠実にモデルへ翻訳できるかの戦いだ。入口寸法の明示化、重量分布の規制対応、AI初期入力後の物理検証をワークフローの標準手順へ組み込む。それなしでは、計画と実行の乖離は縮まらない。データの設定精度と現場の物理的・規制的境界条件の相互検証が、持続可能な積載運用の唯一の礎となる。計算機は道具だ。人間の知見がその刃を研ぐ。