理论满载与现场脱节:如何识别并拦截“算得满但装不下”的装箱方案
码头卷帘门轰然落下。叉车引擎空转。调度单上明明标注着 87% 的体积利用率。总载重也稳稳落在轴限阈值之下。驾驶员依然拒绝签收。为什么?因为求解算法将优先出库的托盘死死压在车厢最深处。它把高频流转的低矮货箱掩埋在一堵致密的滞销品砖墙后面。规划人员经常陷入一种认知偏差。他们倾向于将集装箱装载过程简化为纯粹的三维空间填充谜题。他们习惯性地认为钢铁厢体只是静态的数学边界。他们忽略了真实世界的摩擦。一个货柜本质上是一个高度动态的协同作业场域。装卸序列的刚性要求、叉车的转弯半径限制、瓦楞纸箱的抗压极限以及逐层卸货的时间窗口,共同决定了装载方案能否真正落地执行。
核心操作提取与逻辑剖析:为什么步骤远比点击按钮更重要
当你在系统工作区中着手启动一个新的装载计划配置流程时,底层的计算求解器根本不会理会你的现场直觉。它只会严格地吸收并处理结构化的主数据矩阵。你应当执行标准化命名规范的全面落地实施动作。模糊的备注标签必然会导致版本管理链路的失控。计算引擎只会精准消化明确的 SKU 标识符与参数规格,它绝不会自行揣测手写交接单上的模糊含义。当你完成全部货品数量的录入工作,并且顺利绑定目标集装箱的规格参数之后,你才可以着手发起组合优化例程的执行序列。切勿在此刻停滞审视的步伐。你必须将分析视角的焦点强行转移到未分配库存清单之上。当界面弹出一项状态提示指出“Unloaded 496 items”时,这个数字实际上揭示了当前装载路径的真正瓶颈所在。它迫使你展开对根本阻碍源的深度排查。你需要去判定究竟是可用容积触顶,还是轴向承重超标,亦或是堆叠容差与分组逻辑产生了硬性冲突。
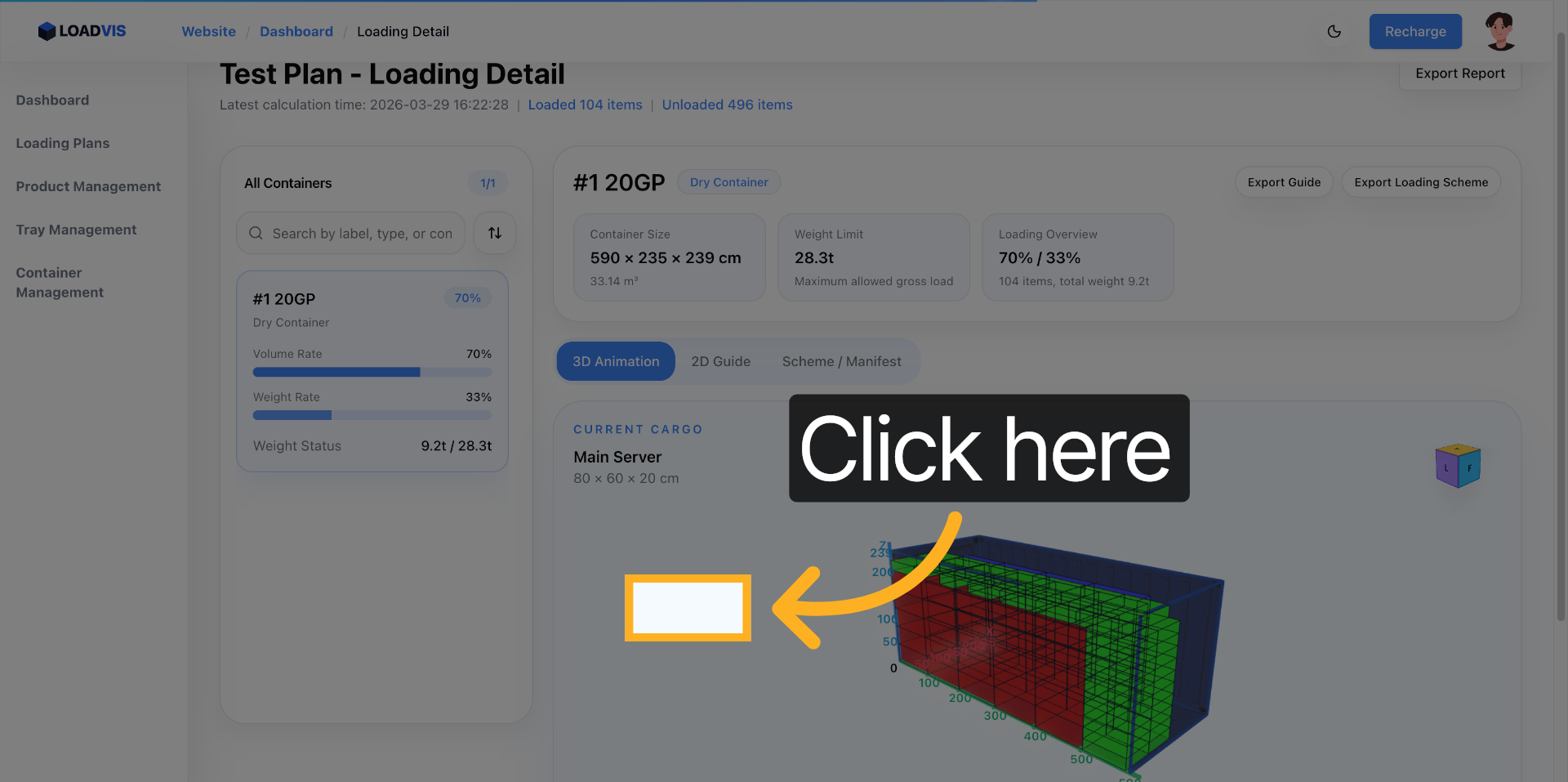
接下来,你需要开展针对三维空间排布状态的视觉校验工作。单纯的体积占比永远只是一个高度抽象的聚合标量。动态的 3D 演示回放与二维平面导视图,负责将求解器输出的抽象坐标矩阵翻译成可落地的现场操作指引。你必须仔细核查堆叠的先后次序。你需要确认厢门开合预留的安全净空。你还得审视内部存在的无效空洞。倘若一套方案在数字面板上展现出极高的装载效率,但动画推演却暴露出关键托盘被掩埋的致命缺陷,那么该计划在作业现场便毫无执行价值可言。
 (执行标准化命名与基础配置动作,确保后续求解器摄入无误的主数据,避免信息链断裂)
(执行标准化命名与基础配置动作,确保后续求解器摄入无误的主数据,避免信息链断裂)
 (未装载列表并非单纯的错误报告,而是多维约束冲突的直接映射表,精准指向后续的参数调整方向)
(未装载列表并非单纯的错误报告,而是多维约束冲突的直接映射表,精准指向后续的参数调整方向)
经验误区与可靠路径:从盲目导出到迭代校准
来看看那种注定会在月台引发混乱的断裂操作流。操作员输入一批估算的近似尺寸。系统仅仅执行一次孤立的求解器运算。计划制定者草草瞥了一眼总体积百分比,对未装载清单视若无睹,随后将生成的装载清单直接下发给仓库执行端。结果会毫无悬念地演变成月台作业拥堵。工人被迫进行临时性的手工翻倒重装。货损率随之直线攀升。安全隐患在无序搬运中悄然滋生。
与之形成鲜明对比的是一套经过反复验证的校准流程。你首先应当开展输入参数精度的全面校验工作。随后触发核心计算例程。紧接着对已装载与未装载货物的分割比例展开细致的交叉审计。你必须精准剥离出引发阻碍的具体约束冲突节点。究竟是门洞干涉?重心偏移?还是分组逻辑错位?你需要据此调整权重参数或是重构发货优先级序列。只有当你反复运行求解例程,并且观察到算法输出的数学解终于与现场搬运逻辑达成高度契合时,你才可以正式放行该方案。它要求持续的迭代循环。它彻底拒绝盲目的信任。
工具能力边界与人工介入节点
系统的核心定位在于多维约束的解析引擎。该软件负责建模重量轴向分布阈值、车厢门洞开启尺寸限制、重心偏移安全范围、垂直堆叠规则以及客户分组优先级。它执行高强度的组合优化演算,并将纯粹的数学解集转化为具备时序性的三维装载序列与二维平面执行导览图。它能够极为迅速地暴露出那些依靠人工排板极易遗漏的不可行混装组合。
但计算引擎始终建立在刚体几何与一致数据的理想化基础假设之上。物理现实往往充满弹性与公差。现场操作人员必须承担起对实际包装公差的独立复核责任。你会频繁遭遇因环境受潮而膨胀变形的瓦楞纸箱。你会碰到因底部支撑薄弱导致的顶部层叠塌陷。系统无法提前预判你所在物流园区的特定型号高位叉车,是否能在存在轻微沉降的不平整沥青地面上发挥其标称的额定起升高度。你必须独立评估托盘货物的实际抗倾覆稳定性。你还需要交叉比对算法自动生成的装车分组序列是否真正吻合下游客户的实际卸车优先权设定。长、宽、高及单重数据的测量精度维持在正负百分之二的波动区间内,仅仅是一条不可妥协的及格基准线。一旦测量漂移突破这一界限,算法产出的结果便会迅速退化为脱离实际的理论推演。
判定准则与执行边界条件
你需要为整个验证环节划定不可逾越的操作红线。当未装载的高优先级 SKU 比例突破百分之十的临界值时,你应当彻底放弃“再次点击重新计算”的侥幸心理。你必须立即启动对底层约束逻辑的全面审查。求解器并不会在分组规则与卸货序列发生根本性矛盾的前提下,凭空变出物理容纳空间。每当重心偏移的警告标识被系统强制点亮时,你都必须无条件地执行重量重分配协议。无论当前的容积利用率数字看起来多么诱人,轴荷平衡的刚性要求永远优先于空间填满的贪婪目标。你必须带着极强的目的性去逐帧审查三维推演动画。重点筛查那些“先卸货后装车”的反向堆叠异常现象。只有当空间释放序列完全匹配场站设备作业动线,当纵向与横向的重量分布稳稳落在车桥承载极限之内,并且所有约束校验标志全部转为放行状态,该方案才具备真正驶出闸口的物理条件。
 (通过多角度拖拽交互执行,确认内部间隙与堆叠拓扑逻辑是否符合实际搬运设备的介入路径)
(通过多角度拖拽交互执行,确认内部间隙与堆叠拓扑逻辑是否符合实际搬运设备的介入路径)
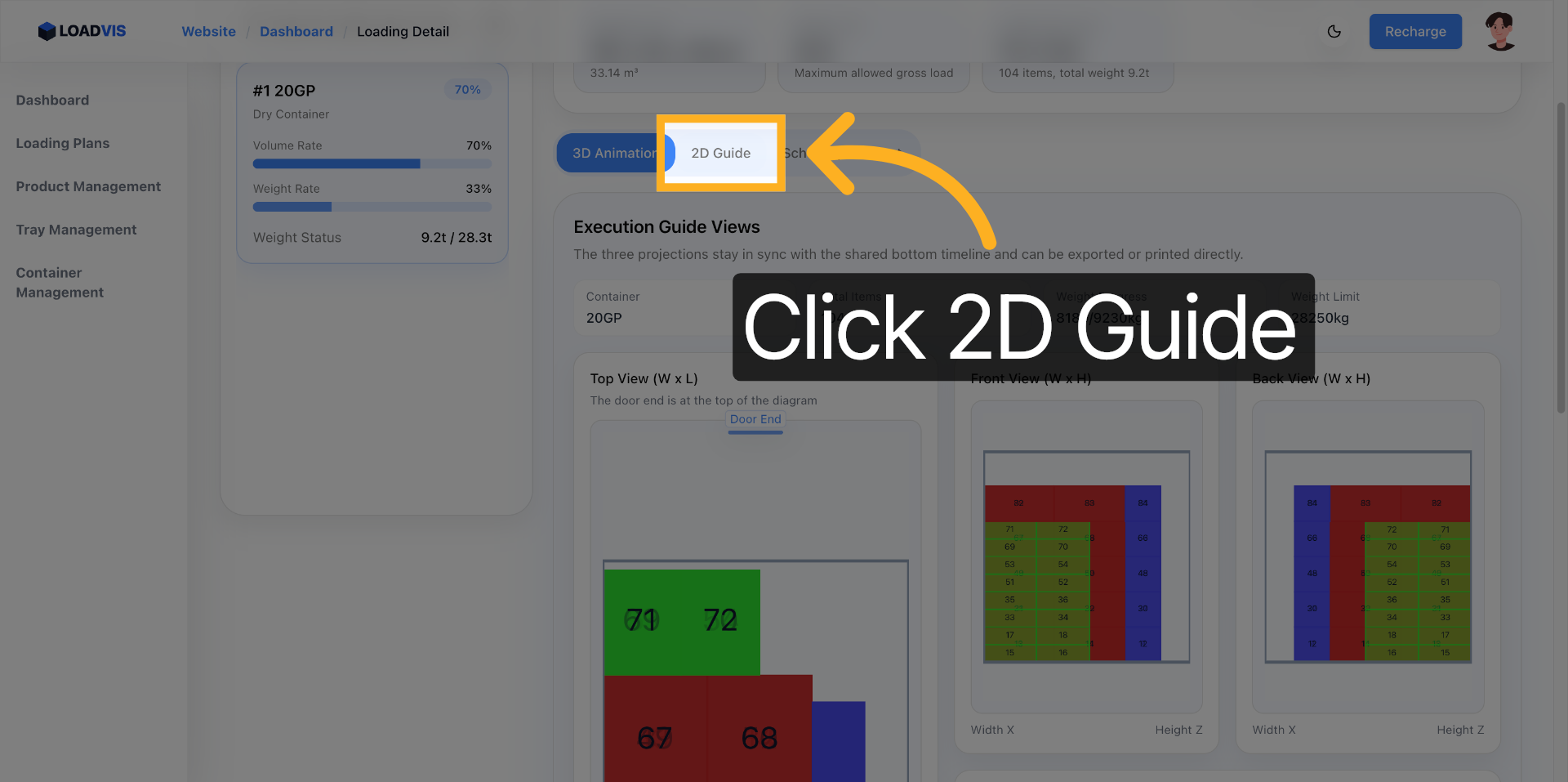 (切换至俯仰侧视平面模式,快速核对装卸时序节点与厢门净空是否产生硬性物理干涉)
(切换至俯仰侧视平面模式,快速核对装卸时序节点与厢门净空是否产生硬性物理干涉)
结语
数学模型并不负责搬运沉重的托盘。它们仅仅负责投射理论可行性边界。算法负责进行几何形态与物理约束的可行性演算;操作人员承担对现场运行真实性的最终核验。一套真正可靠的装载方案,从来不是那个百分比数字最高的版本,而是唯一能够经受住月台实地检验的预案。