容積適合≠実行可能:積載計画が現場で頓挫する3つの物理的制約とデータ入力の実践検証
1. シナリオと問題の定義
容積率98%。ソルバーが弾き出したこの数値だけを見れば、計画は完璧に見える。しかし現場は冷徹だ。フォークリフトの旋回半径を無視した充填配置は、コンテナ内部で瞬時に死に体になる。数学的な直方体パッキングが成立していても、物理的な搬入経路が確保されていなければ、それは単なる数式上の幻に過ぎない。典型的な失敗シナリオは3つに収斂する。幾何学的適合と物理的実行不能の乖離。入口寸法や段差の干渉をデータに組み込まない初動の破綻。そして重心位置のわずかな偏差が輸送中の横転リスクや軸重規制違反を誘発する不均等重量分布。アルゴリズムはこれらを「考慮外」として処理する。なぜか。幾何学と力学は別次元の論理だからだ。この構造的理解が欠落していれば、計画は実行不可能な解を吐き出し続ける。
2. 過小評価されがちな構造的な理由
この認知断離が軽視される根幹は、抽象的な幾何計算と実環境の物理摩擦を同一視する誤解にある。多くのエンジニアや計画担当者は、L×W×Hと総重量をCSVに放り込めば、あとはシステムが良きに計らうと楽観する。パレットの剛性限界。最小支持面積。ドアクリアランス。これらを「荷役担当が現地で調整するはず」と丸投げする癖が、ソルバーに誤った境界条件を平然と食わせる。特に近年のAI解析や一括インポートが普及したことで、データ投入のハードルは劇的に下がった。だが、抽出数値が現実の物理境界を正確にトレースしているか。この検証ステップは往々にして切り捨てられる。入力データに単位系の混在や桁ズレが含まれれば、出力結果はガベージ・イン・ガベージ・アウトの法則に従う。最適化はあくまで定義された制約内でしか機能しない。それが理解されていないと、理論上は収束しても現場で実行不可能な解が量産されるだけだ。あなたは経験があるだろう。美しいプレビューと、荒れた現場指示書の落差に。
3. 操作手順から抽出すべき重要アクション
計画の実行可能性を担保するためには、データ入力フェーズで特定の検証アクションを強制する必要がある。自動化に依存するほど、手動での境界線確認は重要度を増す。以下は、管理モジュールのワークフローから抽出すべき必須手順だ。
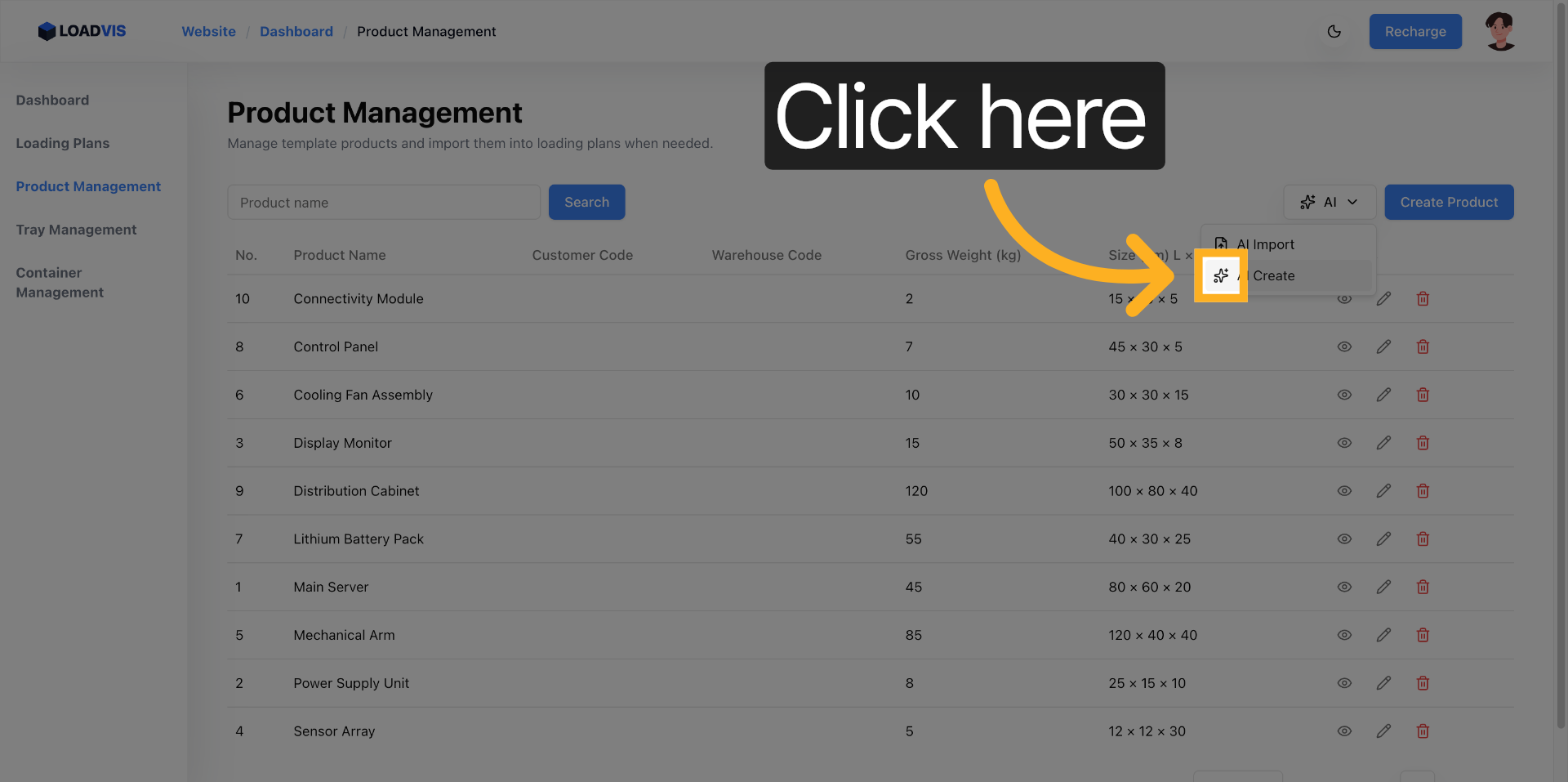
まずAI作成時の出力検証だ。自然言語から仕様を解析する際、単位系の混在や小数点の位置ズレは致命的な誤差を生む。製品管理エリアから「AI 作成」を起動し、テキスト入力フィールドに製品名、総重量、寸法を連続で流し込む仕組みは高速だ。空行区切りで複数エントリーを処理できるため、バッチ登録の工数は削れる。ただし、ここで終わらせてはならない。
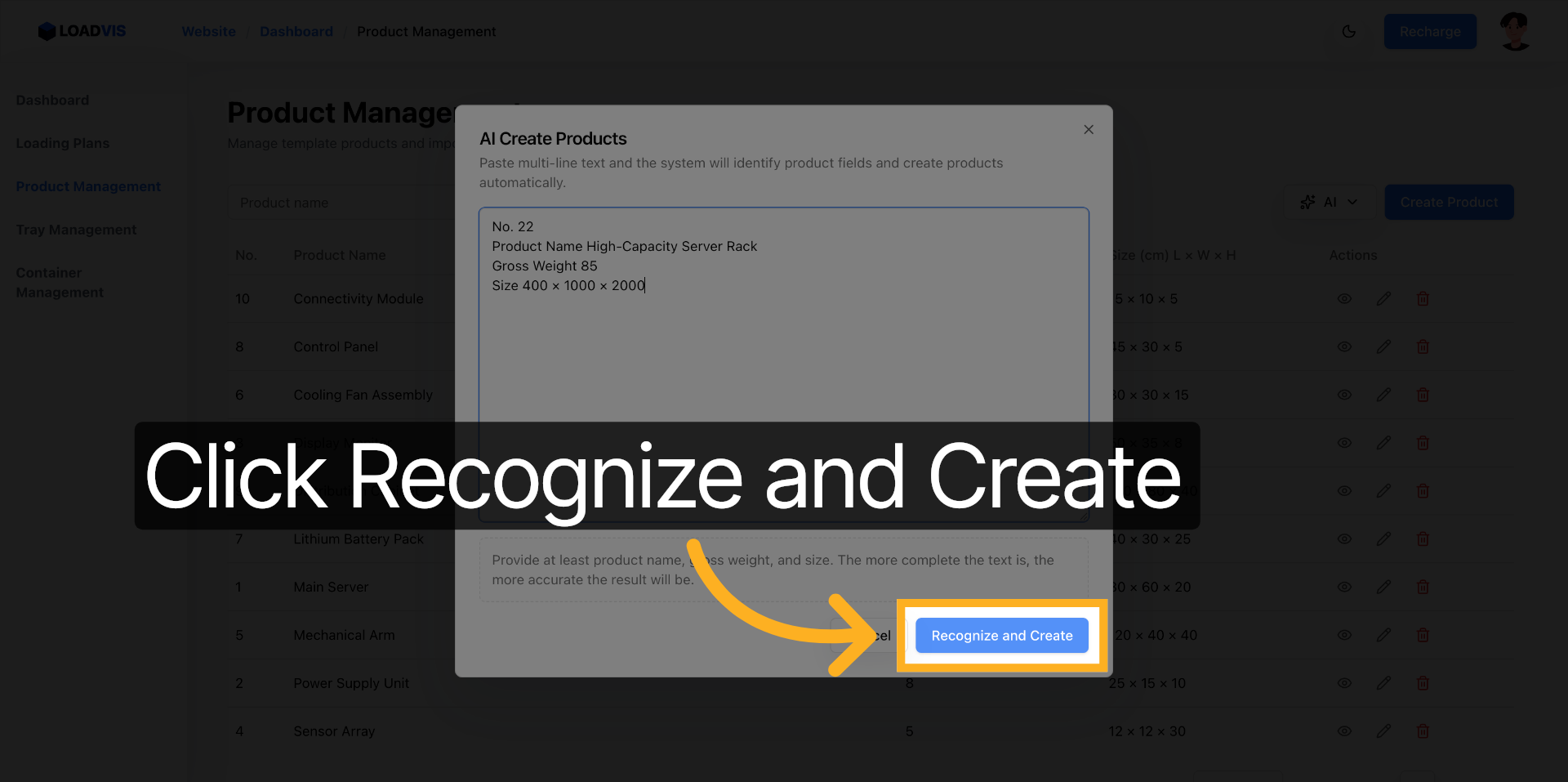
 認識処理が完了した段階で、必ずデータベースに書き込まれたパラメータを覗く必要がある。「認識して作成」のトリガーを引く前に、抽出された総重量と寸法が論理的に整合しているか。単位変換の齟齬が起これば、ソルバーの計算根底が崩れる。手作業でのクロスチェックは省けない。
認識処理が完了した段階で、必ずデータベースに書き込まれたパラメータを覗く必要がある。「認識して作成」のトリガーを引く前に、抽出された総重量と寸法が論理的に整合しているか。単位変換の齟齬が起これば、ソルバーの計算根底が崩れる。手作業でのクロスチェックは省けない。
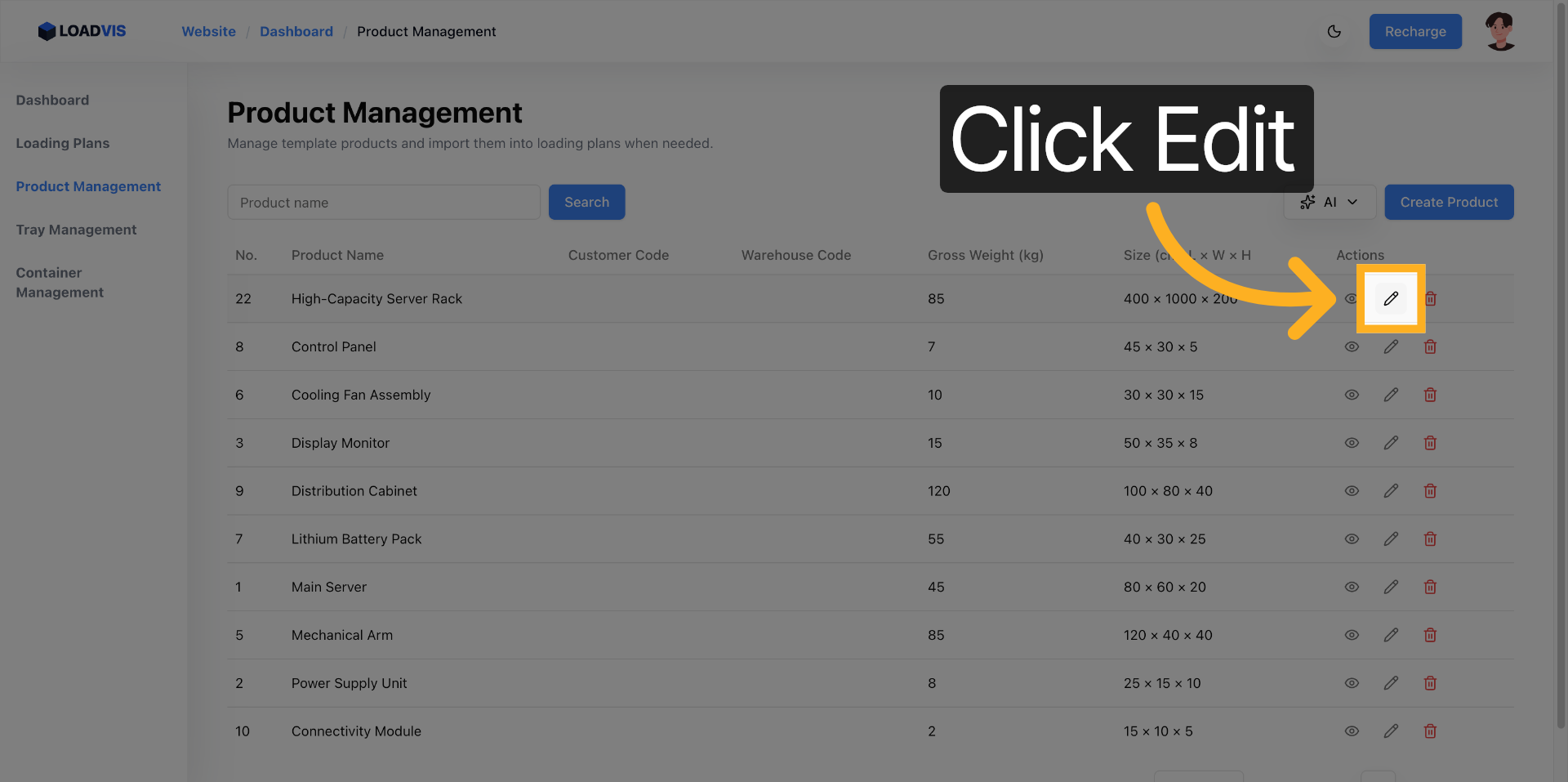
次に、編集モードでの制約明示。AIが拾えなかった物理的限界値は、手動で埋め込むしかない。製品一覧から対象レコードの「編集」を選択し、各フィールドへの書き込み権限を開放する。
 「最大積載容量」「最小積載構成」の各欄は、単なる数値入力フィールドではない。アルゴリズムに対する絶対的な指令だ。実測値に基づく厳密な境界値を登録しない限り、下段貨物の圧壊リスクは消えない。シリアル番号や総重量の更新と同列に扱うべきではない。
「最大積載容量」「最小積載構成」の各欄は、単なる数値入力フィールドではない。アルゴリズムに対する絶対的な指令だ。実測値に基づく厳密な境界値を登録しない限り、下段貨物の圧壊リスクは消えない。シリアル番号や総重量の更新と同列に扱うべきではない。
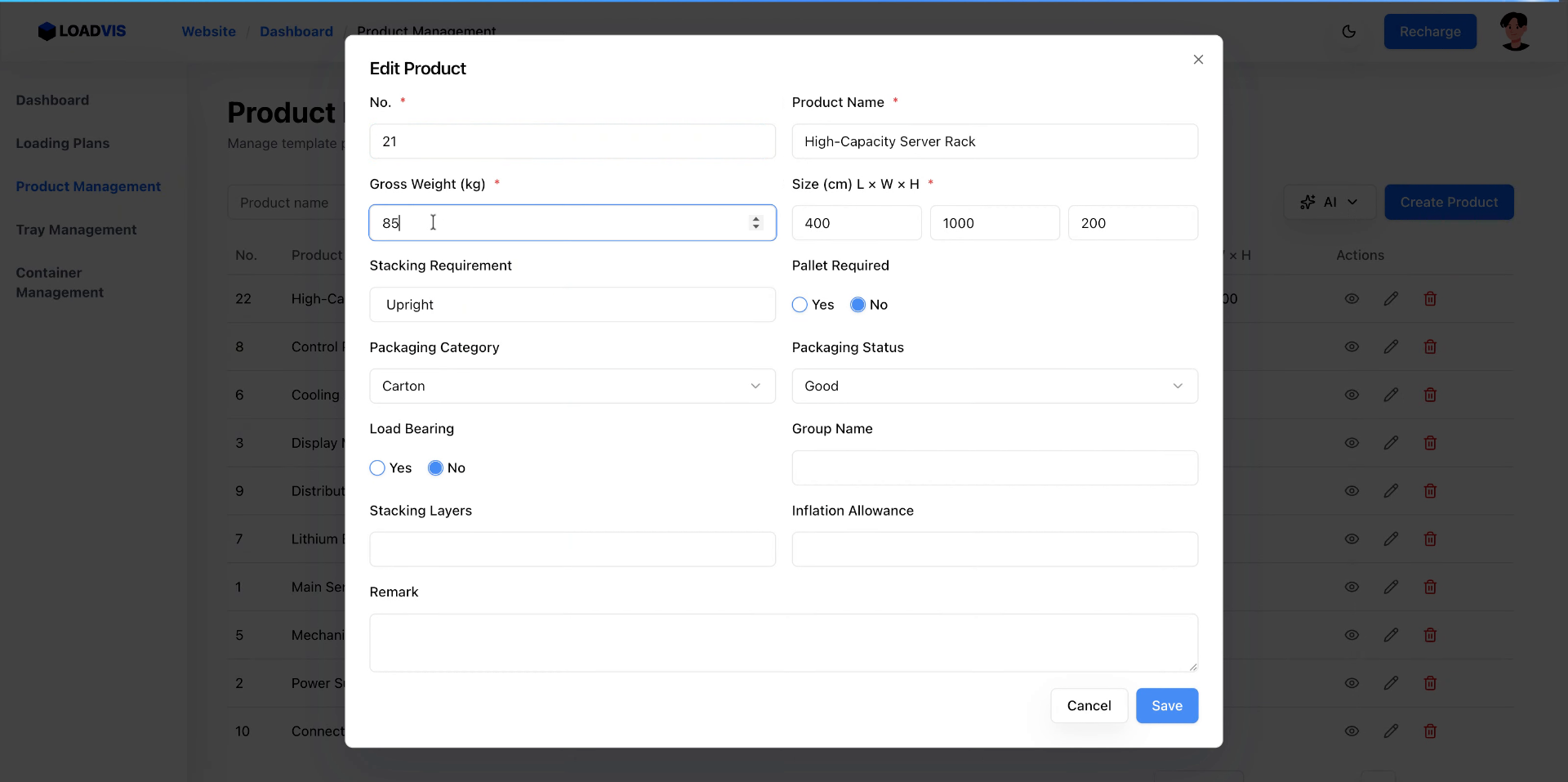 そしてパレット要件フラグの制御。これを「有効化」するか否かで、ソルバーの動作は根底から変わる。パレットの自重と基準寸法を計算ロジックに組み込ませるためのトリガーだからだ。
そしてパレット要件フラグの制御。これを「有効化」するか否かで、ソルバーの動作は根底から変わる。パレットの自重と基準寸法を計算ロジックに組み込ませるためのトリガーだからだ。
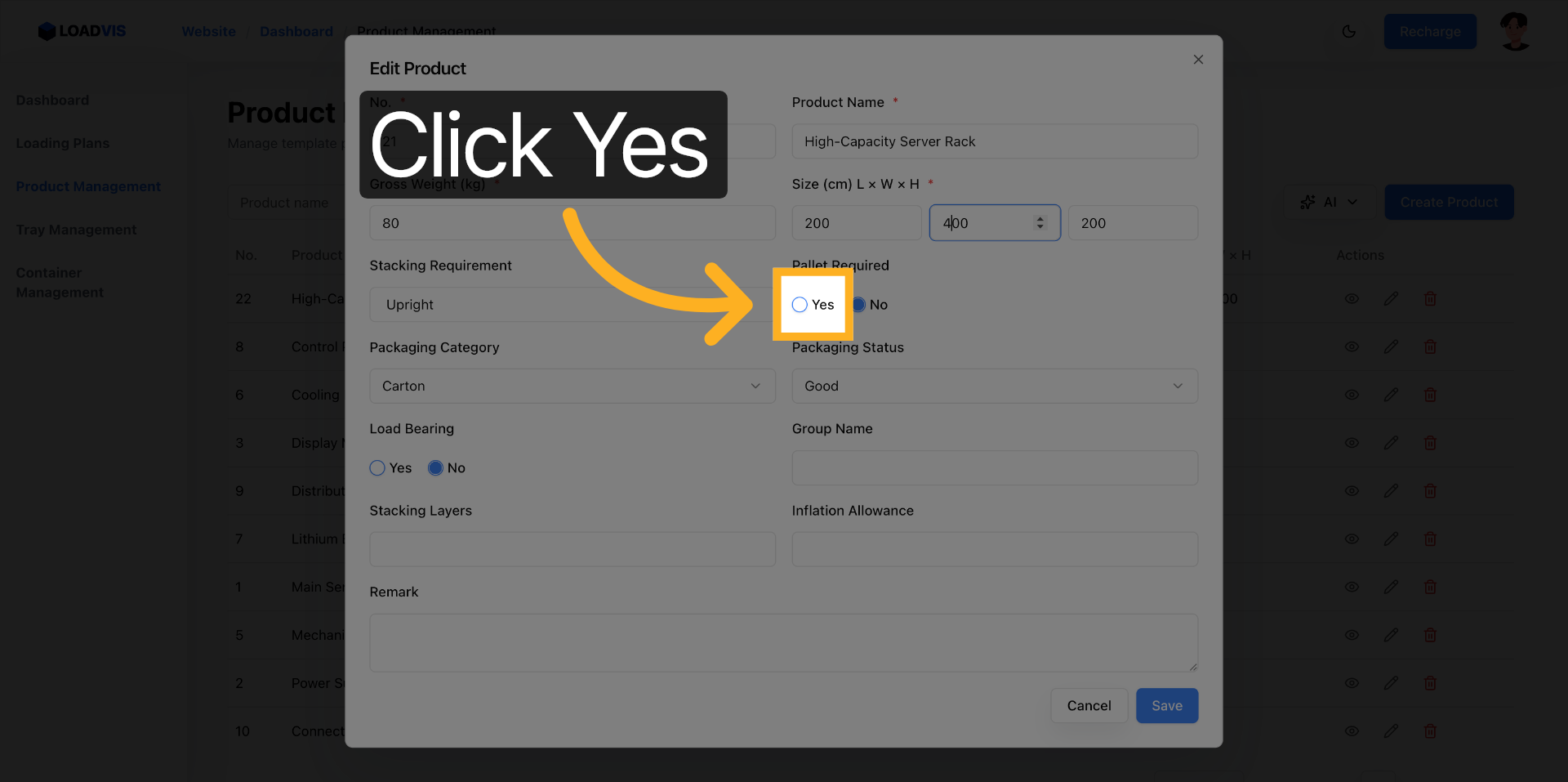 すべてのパラメータを入力し終えたら、保存を実行して永続化する。リスト画面は即時反映される。だが、UIの簡便さが逆に落とし穴になることもある。変更後の影響範囲を評価せずに保存すれば、既存計画の整合性が連鎖的に崩れるのだ。
すべてのパラメータを入力し終えたら、保存を実行して永続化する。リスト画面は即時反映される。だが、UIの簡便さが逆に落とし穴になることもある。変更後の影響範囲を評価せずに保存すれば、既存計画の整合性が連鎖的に崩れるのだ。
4. 各操作が重要な理由
積載ソルバーは入力データを盲目的に境界条件として処理する。ここが多くのユーザーが陥る盲点だ。最大積載容量を未定義、あるいはカタログ値以上の過大な数値で登録したとする。アルゴリズムは「載せられる限界」を知らないまま、密度最大化だけを目指す。結果、下段の脆弱なパッケージが上段の重量で潰される配置が平然と出力される。幾何学的には収束している。しかし物理的には破綻している。入口寸法や作業スペースのマージンを無視すれば、干渉チェックが機能しないのは自明だ。
パレットフラグも同様。単なる包装オプションと誤解しオフにすれば、積載基準面が消失し、段積みロジックが現実から浮遊する。Z軸オフセットと剛性係数は、このフラグ一つで再定義される。これらのパラメータが欠落した状態で導かれた解は、現場指示書として機能しない。紙くずと変わらない。なぜなら、実働環境の摩擦や重力、機械の干渉を一切モデル化していないからだ。ソルバーは与えられた条件を忠実に解く機械に過ぎない。条件の現実妥当性は、人間の責任範囲に留まる。
5. 間違ったアプローチ vs 確実なアプローチ
失敗するパターンは驚くほど画一的だ。容積と総重量だけをフォームに流し込む。耐荷重、重心偏差、入口クリアランスは「後工程で調整」と仮定し、パレットフラグを無効化。容積率99%を唯一のKPIに掲げ、計算を実行する。結果はどうなるか。3Dプレビュー上では美しいパズルが完成する。だが現場では搬入経路が塞がり、重量分散が規定を逸脱し、計画の全書き直しが求められる。工数と遅延コストが跳ね上がるのは必定だ。理論の皮を被った実践欠如である。
逆に、実行可能な計画を導くアプローチは地味で厳格である。実測データに基づく寸法登録を徹底する。単位換算の検証は手動で行う。最大/最小積載容量を定義し、Crushing Risk を数学的に封じる。パレット要件を有効化し、段積み制約をアルゴリズムに飲ませる。容器設定や製品余白パラメータとして、入口寸法やハンドリング機器の旋回マージンを明示的に定義する。そしてアルゴリズム実行後、Guideビューに立ち戻る。搬入順序の妥当性、重心軌道の安定性、干渉点の有無をクロスチェックする。この検証プロセスを飛ばして、確定ボタンを押す権限はない。計画の成否は、UIのクリック数ではなく、検証の深さで決まる。
6. ツールが支援する範囲と手動確認の境界
自動化ツールがどこまで支援し、どこからが人間の領域か。この線引きを曖昧にすると、システムへの過度な依存が生じる。構造化データの自動抽出、複合制約に基づく数理最適化、3D可視化、現場指示書のエクスポート、バージョン管理。これらの機能は、前提条件が正しい場合に圧倒的な速度と精度を発揮する。しかし、手動確認が必要な境界線は依然として太い。
AIが抽出した数値と現物の一致検証は必須だ。特に単位換算ミスや仕様書の解釈違いはシステムが検知できない。ハンドリング機器の実際の旋回経路やドアしきい値の実測比較。貨物の包装変形、角の面取り、突起部による実効寸法のズレ。現地の道路法規や車両軸重規制の最終適合判断。ツールは「制約が正しく定義された場合」にのみ最適解を返す。制約自体の現実妥当性と、現場特有の物理的イレギュラーへの対応。これは依然としてオペレーターの経験と検証プロセスに委ねられる。自動化は万能ではない。検証漏れが許されない領域では、指差し確認とメジャーが最後の砦になる。
以下のワークフローは、パラメータ編集と計画確定までの実際の動作を示している。非同期処理の待機時間や、出力ガイドの閲覧方法に焦点を当てている。
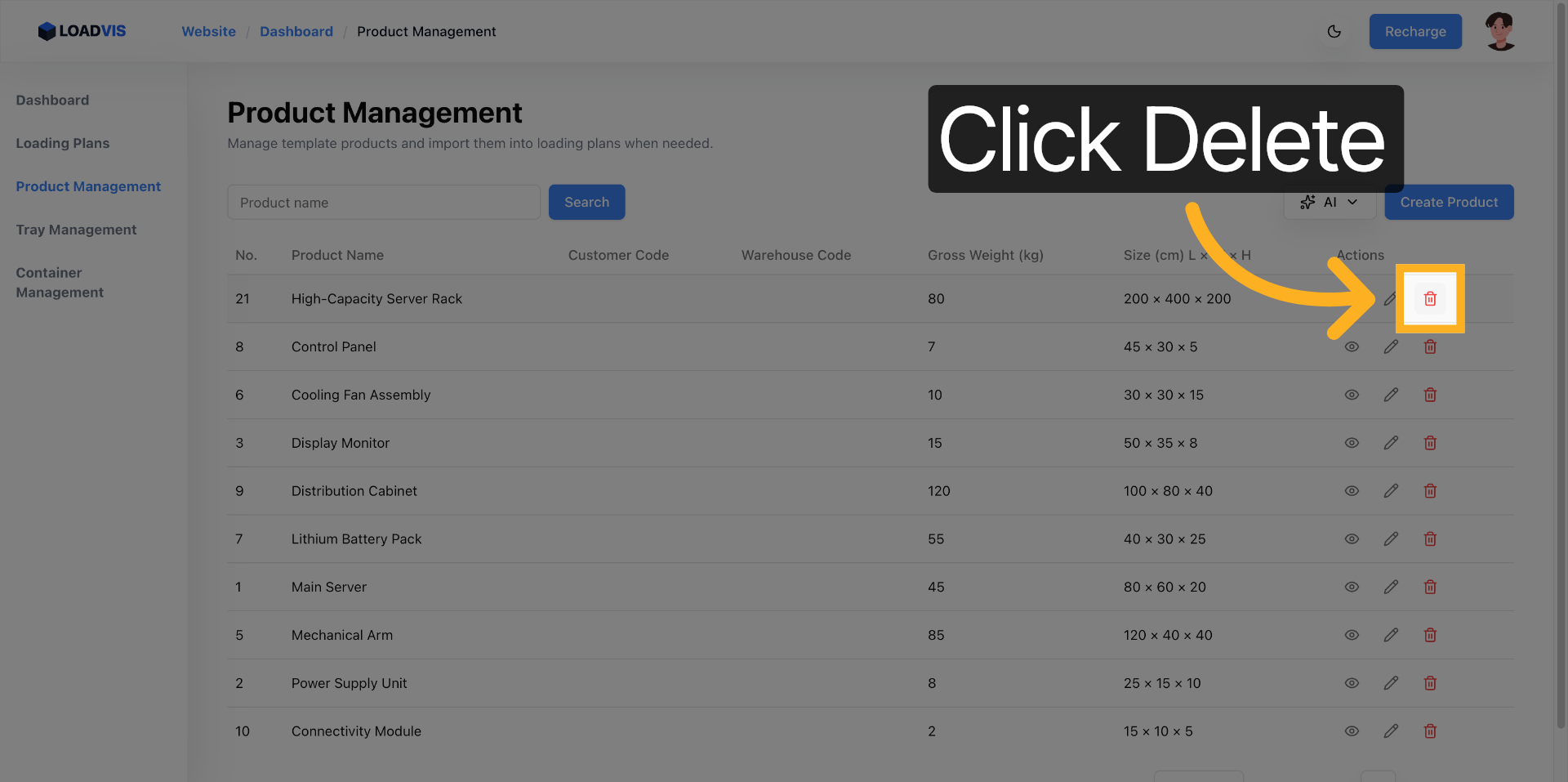
製品の削除操作にも注意が必要だ。誤ってアクティブな計画に紐づくレコードを削除すれば、参照整合性が崩れ、再計算が不可能になる。二重の確認ダイアログを通過する設計は、データ損失を防ぐ最低限のセーフガードである。
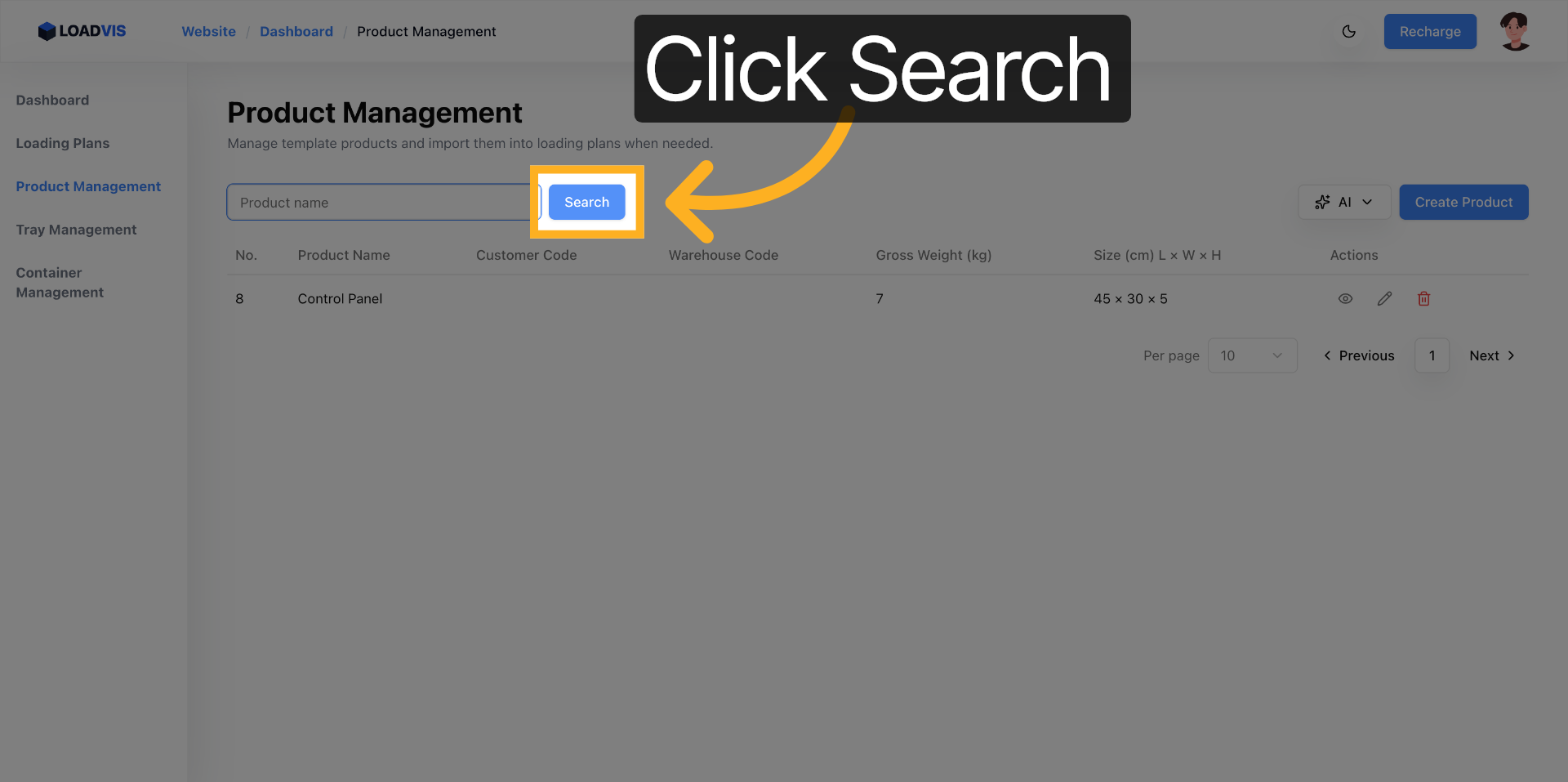
 検索機能も同様だ。キーワードによるあいまい一致は便利だが、同名異品やリビジョン違いのレコードを混同するリスクを常に孕む。検索結果の一次データを鵜呑みにせず、シリアル番号や重量プロファイルで再照合する癖が、後のトラブルを未然に防ぐ。
検索機能も同様だ。キーワードによるあいまい一致は便利だが、同名異品やリビジョン違いのレコードを混同するリスクを常に孕む。検索結果の一次データを鵜呑みにせず、シリアル番号や重量プロファイルで再照合する癖が、後のトラブルを未然に防ぐ。
7. 結び
積載計画の実用性は、容積最適化率の数字で測るものではない。現場の物理的・作業的制約を、どれだけ正確に数式とパラメータに翻訳できたかに比例する。データ登録の自動化は生産性を押し上げるが、それは入力精度の検証プロセスと境界条件の厳密な定義があって初めて成立する基盤技術だ。計画フェーズで物理制約を不動のルールとして固定する。出力結果に対して、実行経路と重量分散をシミュレーション上で検証する。このワークフローを標準化しなければ、理論と実践の溝は埋まらない。運用リスクを収束させるのは、美しいアルゴリズムではない。現実を直視し、制約を定義し続ける地味な検証工程そのものだ。数値だけの楽観は、物理法則の前で簡単に砕ける。