理论满载与现场返工:被忽略的“未装清单”与卸货动线复盘
理论满载。数字漂亮。现场翻车。
装载方案的体积利用率一旦跨过百分之九十五的红线,调度看板便会呈现出一种令人放松的静态美感。求解器会在后台进行多约束异步迭代,并且输出空间填塞率极高的拓扑排列数据。可当集卡真正停靠在月台闸口时,叉车工面对的往往是死结。高优先级SKU被算法当作缓冲垫塞进了车厢最深处。卸货动线发生剧烈冲突。数学最优解与物理可操作性之间,存在一条极其顽固的割裂带。
业务团队极易陷入单一指标崇拜。将“能否塞满一个柜”当作最终交付物。这种认知偏差的缘由,在于误认为算法输出的坐标矩阵天然契合现实工况。尾差件往往包裹着高价值订单或者临期急件。门框净高与集装箱底板的微变形量,会在实际装卸中形成隐形拦截。若缺乏人工维度的物理校验,补发成本与客诉概率会呈指数级攀升。
我们需要把目光从已装统计上移开。
建立命名锚点。这是切断版本混乱的第一道防线。在创建新装载计划时,执行初始化操作来启动配置面板。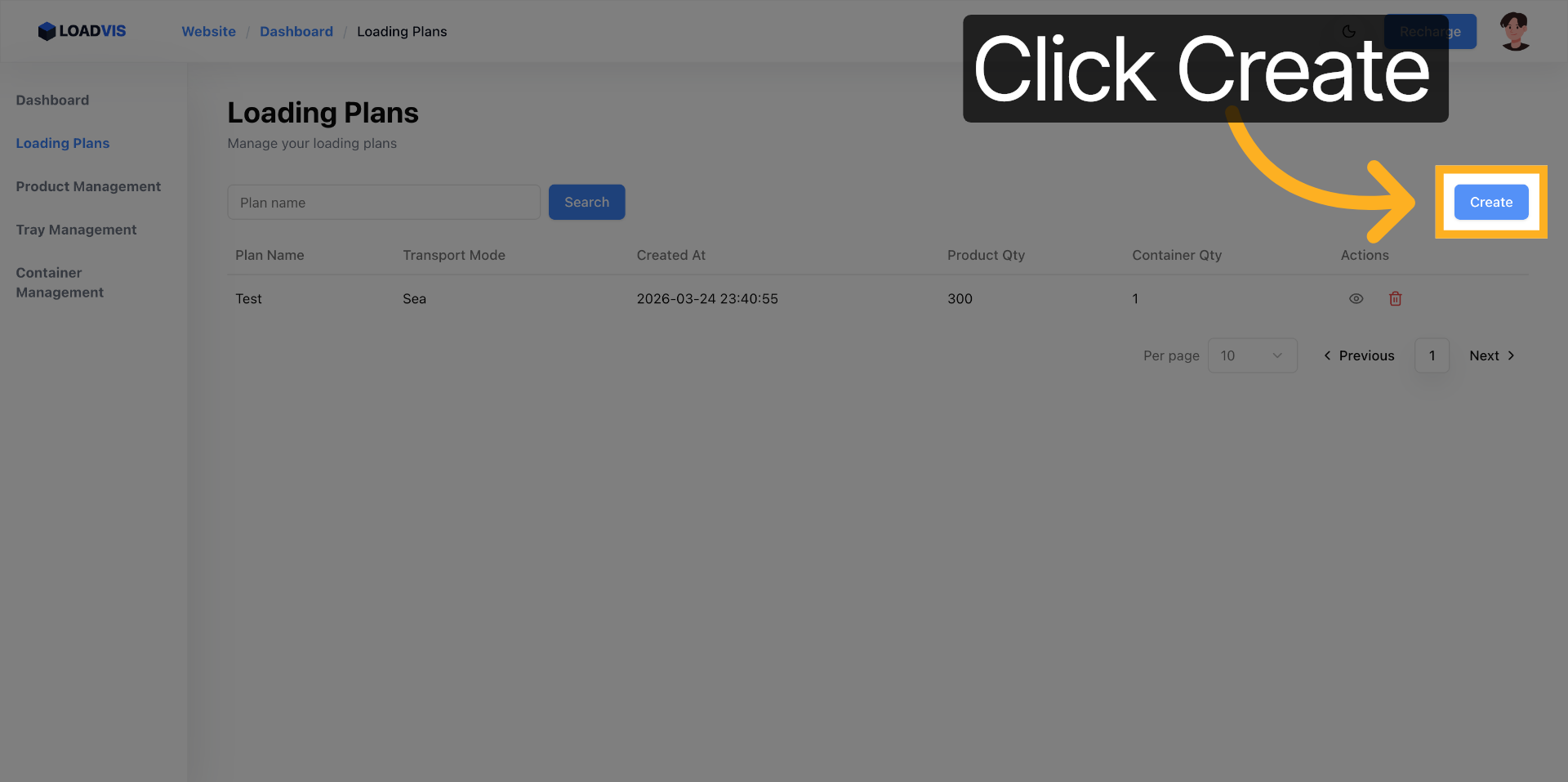 紧接着在输入框当中进行标准化命名的录入工作。
紧接着在输入框当中进行标准化命名的录入工作。 必须引入批次号、日期戳以及承运商代码。要是现场同时并行三套以上的改派方案,缺乏唯一标识的指导图会直接引发错装事故。 执行保存动作来进行持久化操作,后续所有的货物映射以及参数修订,都会以此为基准开展追溯工作。版本管理不是形式主义,而是为了在出现动线争议时,能够迅速定位是哪一轮约束参数出现了偏离。
必须引入批次号、日期戳以及承运商代码。要是现场同时并行三套以上的改派方案,缺乏唯一标识的指导图会直接引发错装事故。 执行保存动作来进行持久化操作,后续所有的货物映射以及参数修订,都会以此为基准开展追溯工作。版本管理不是形式主义,而是为了在出现动线争议时,能够迅速定位是哪一轮约束参数出现了偏离。
强制展开异常面板。这才是决策盲区真正藏身的角落。
大多数操作者习惯性地忽略系统给出的拦截清单。他们默认被剔除的货物会自动顺延至下一航次。这种假设极其危险。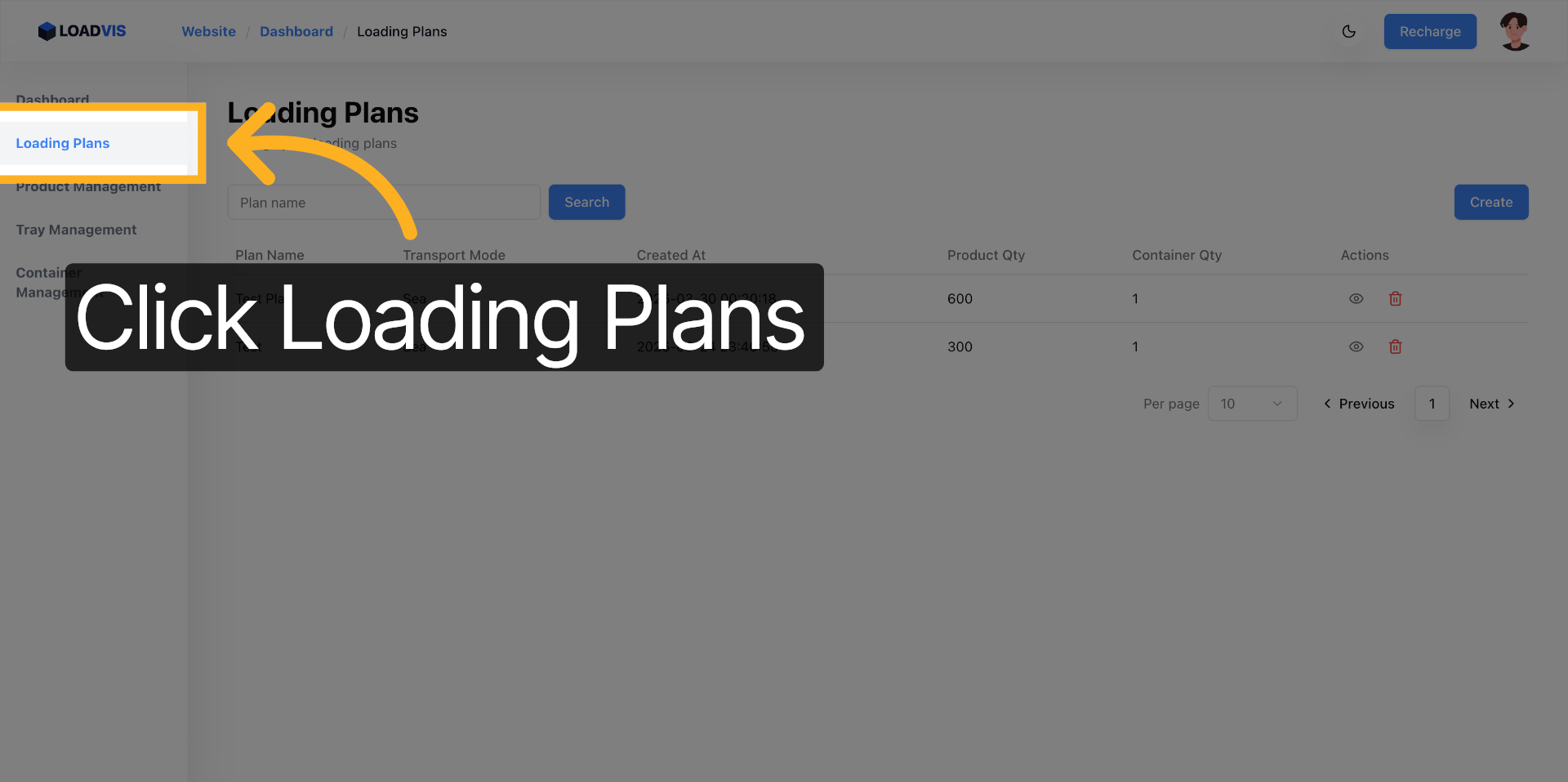 进入管理区域后,执行点击动作来调取目标方案的完整结果页。
进入管理区域后,执行点击动作来调取目标方案的完整结果页。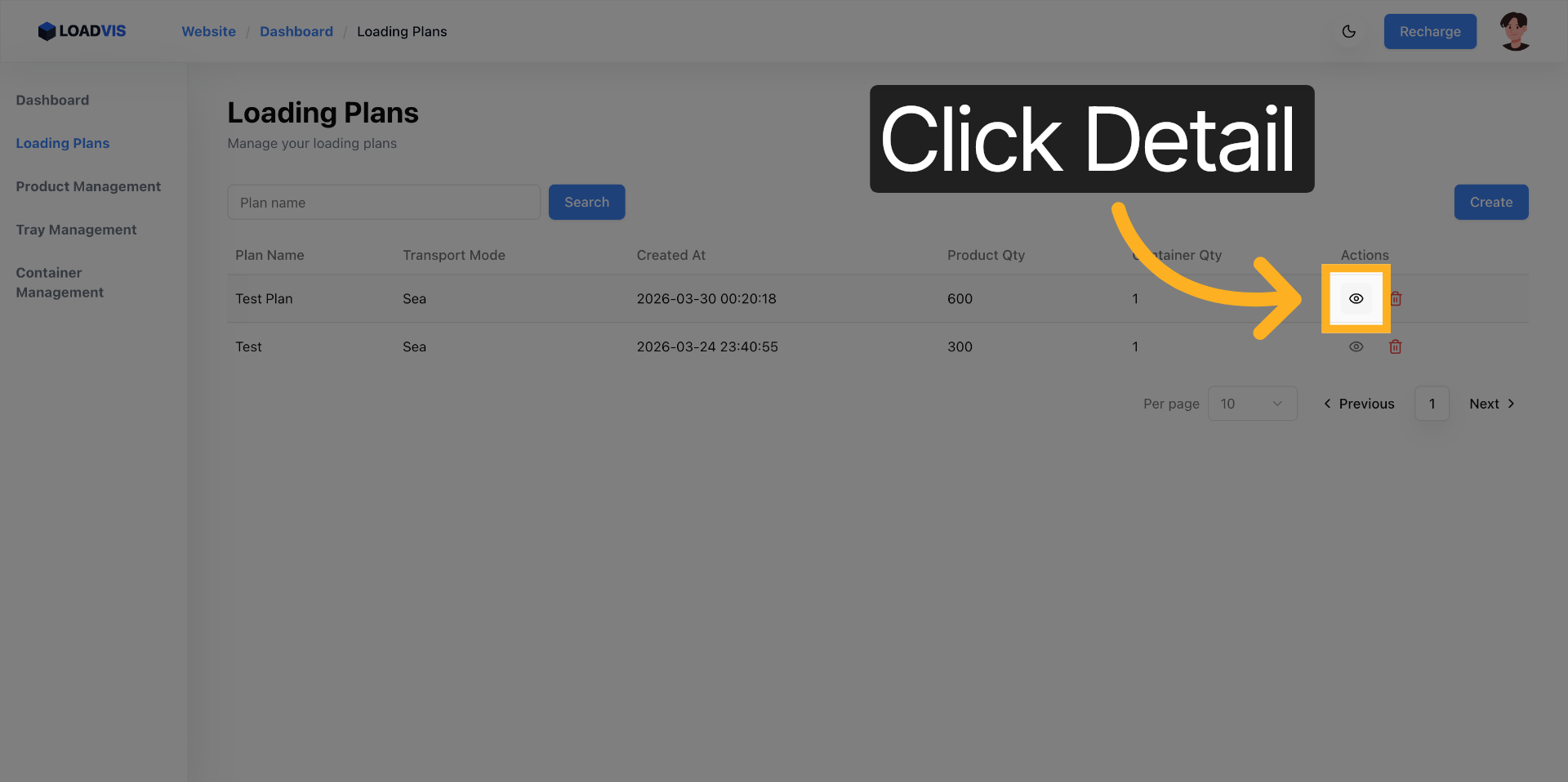 必须主动展开未装货物摘要区域,进行明细清单的查阅工作。
必须主动展开未装货物摘要区域,进行明细清单的查阅工作。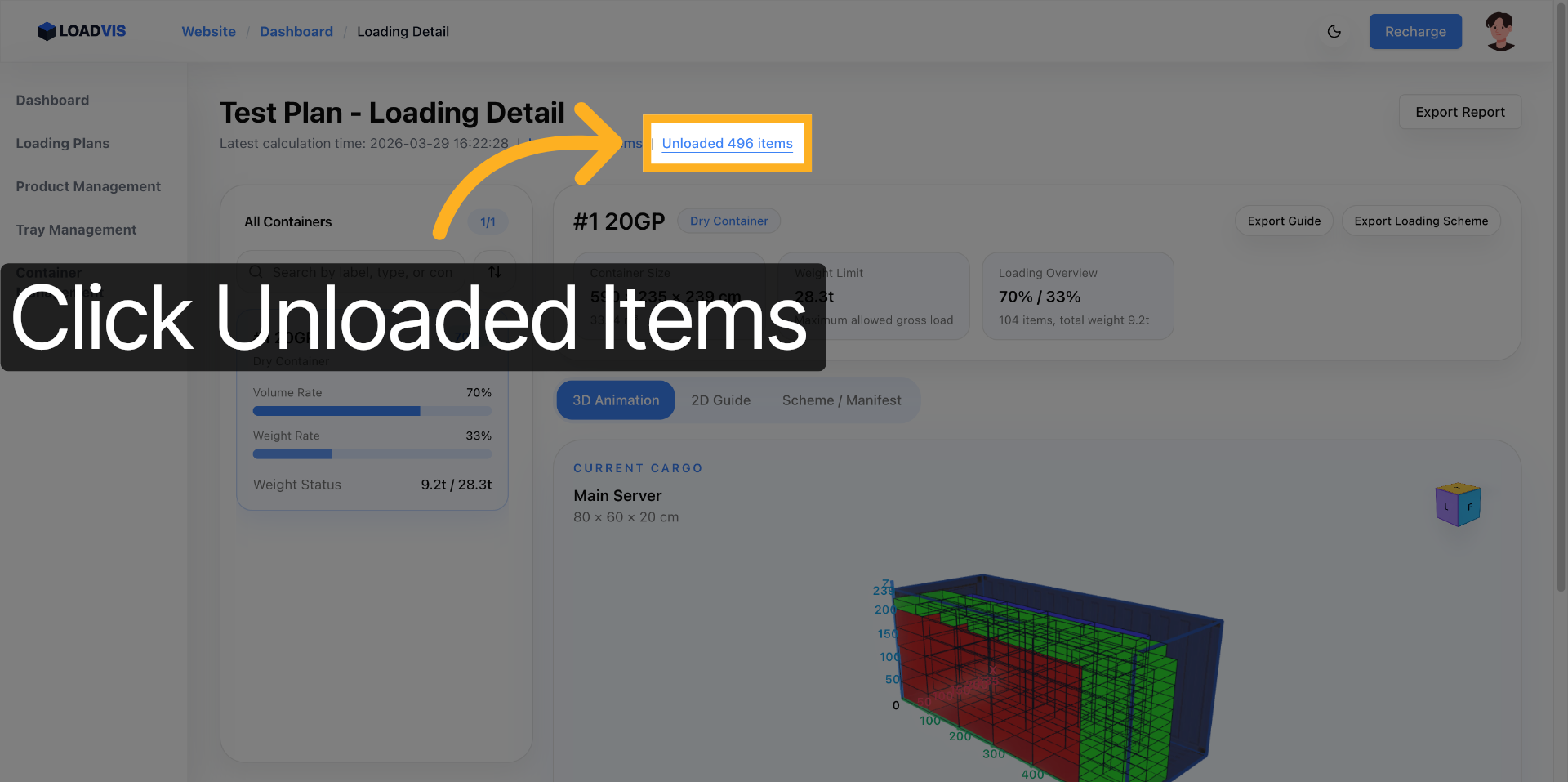 算法之所以把这些SKU拦在外面,主要原因囊括了尺寸超限、重量差阈值触及以及同组不拆分策略的触发。
算法之所以把这些SKU拦在外面,主要原因囊括了尺寸超限、重量差阈值触及以及同组不拆分策略的触发。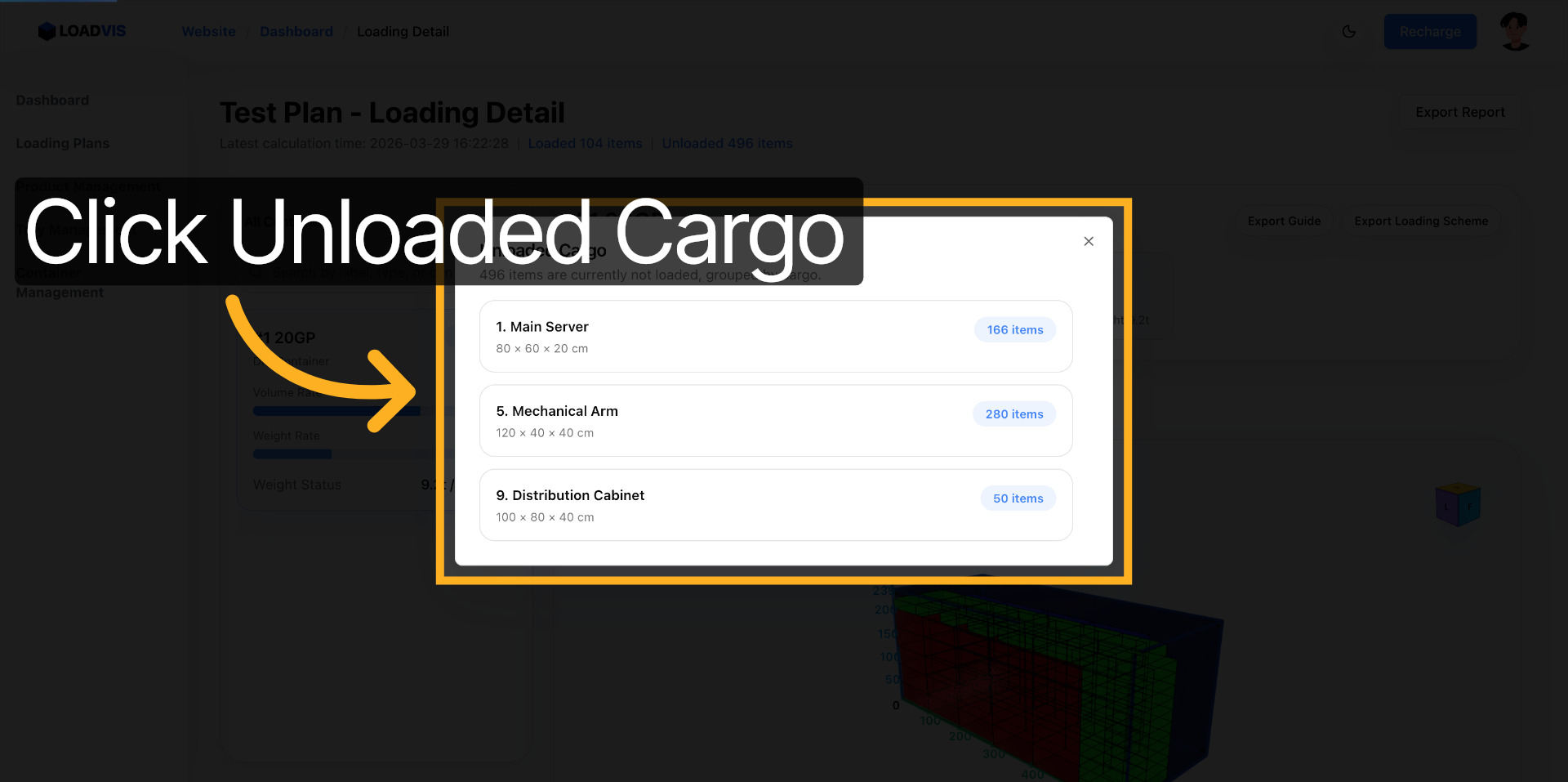 展开分组详情后,去逐行核对剩余数量以及货物组属性。当未装占比大于百分之五的时候,必须立刻暂停下发指令。人工需要判断,究竟是物理空间确实无法容纳,还是托盘膨胀系数未进行合理补偿,或者是重量约束设置得过于保守。把拦截清单当作异常处理的起点,而不是损耗的终点。
展开分组详情后,去逐行核对剩余数量以及货物组属性。当未装占比大于百分之五的时候,必须立刻暂停下发指令。人工需要判断,究竟是物理空间确实无法容纳,还是托盘膨胀系数未进行合理补偿,或者是重量约束设置得过于保守。把拦截清单当作异常处理的起点,而不是损耗的终点。
脱离静态截图的欺骗性。空间认知必须依赖动态验证。
二维平面永远无法呈现门洞干涉区与重心偏移的耦合效应。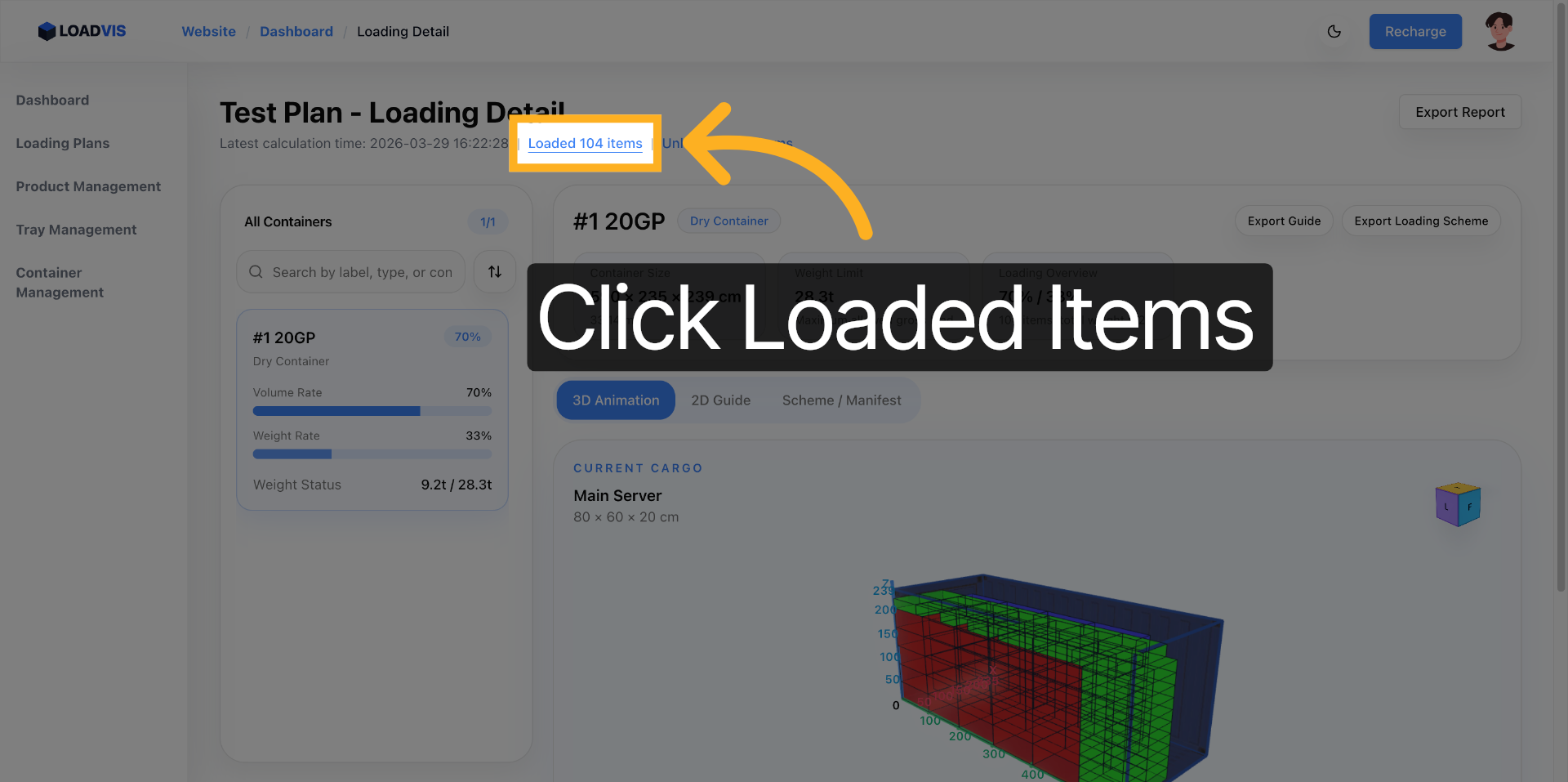 在三维渲染界面当中,进行多角度的拖拽交互以及空间分布的检视工作。
在三维渲染界面当中,进行多角度的拖拽交互以及空间分布的检视工作。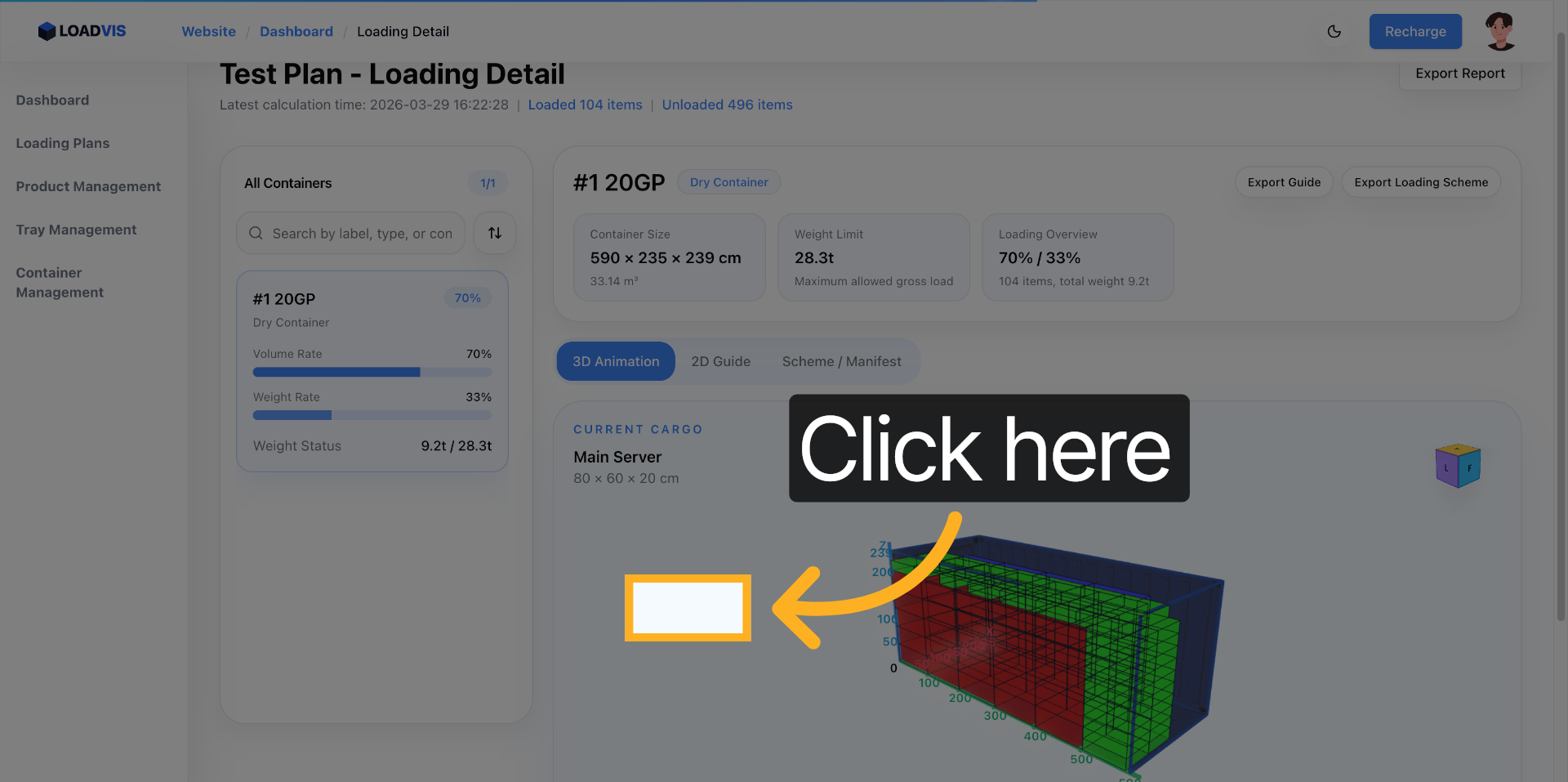 依靠鼠标拖动来模拟叉车货叉的推进轨迹,并且验证卸货顺序是否满足后进先出或者先进先出的逻辑诉求。切换至高速倍率播放模式,进行连续堆叠状态的观察。要是重箱全部压在轻箱之上,并且重心投影点大幅偏离底板中线,现场极易发生侧翻隐患。工具提供了视觉映射,但门边净空余量是否适宜放置带木托盘的异形件,叉车回转半径是否会撞击侧壁加强筋,这些物理边界必须依靠人工在视图当中进行交叉复核。
依靠鼠标拖动来模拟叉车货叉的推进轨迹,并且验证卸货顺序是否满足后进先出或者先进先出的逻辑诉求。切换至高速倍率播放模式,进行连续堆叠状态的观察。要是重箱全部压在轻箱之上,并且重心投影点大幅偏离底板中线,现场极易发生侧翻隐患。工具提供了视觉映射,但门边净空余量是否适宜放置带木托盘的异形件,叉车回转半径是否会撞击侧壁加强筋,这些物理边界必须依靠人工在视图当中进行交叉复核。
错误做法极其普遍。截一张容积率达标的数据图,直接甩给仓库。叉车工凭借肌肉记忆进行盲排。高优件被深埋。紧急单被迫二次开箱。翻找过程消耗两小时以上。动线彻底瘫痪。
更稳妥的路径,是把校验重心前置到下发之前。凭借未装清单进行拦截项归类。结合动态视图推演卸货逻辑序列。核对门框实际净高与货物外包装含水率膨胀值的叠加效应。在导出作业指导图以前,运用标记功能把不可压损位以及优先提取区进行高亮处理。同步给现场调度以及货代单证。参数不是死的,工况是活的。
算法的边界非常清晰。求解器能够完成多维约束的数学拼解,并且提供精确到个位数的已装与未装统计明细。三维分布图可以极大程度上消除纯人工估算带来的空间盲区。工具止步于静态物理建模与参数运算。现场集装箱在长期循环使用中产生的金属疲劳形变、地锁的实际凸起高度、木托盘的真实抗压强度以及木材吸湿后的尺寸胀大值,都不在系统的感知范畴之内。装卸设备的极限举升高度、客户临时插入的加急单覆盖逻辑,属于动态商业变量。当上述物理与商业条件发生偏离时,必须依靠人工介入进行参数拦截,或者手动覆盖重量阈值后重新发起计算求解。
装载率只是起点。可执行才是终点。