Volumenoptimierung vs. Ladepraxis: Das unterschätzte Risiko ungleicher Gewichtsverteilung
Man füttert den Solver mit Außenmaßen. Erwartet, dass die Füllrate allein ausreicht. Und wundert sich später, warum das Verladeteam die Palette an der Kante stehen lässt. Punkt. Weil CBM eine reine Rechengröße ist. Der reale Laderaum gehorcht keinem Algorithmus, sondern der newtonschen Mechanik. Punktlasten. Reibungswerte. Die tatsächliche Druckfestigkeit von Wellpappe unter Feuchtigkeitslast. Ich habe diese Schere zwischen Planungssoftware und Rampe oft genug vermessen. Sie entsteht nicht durch mangelnde Prozessorleistung. Sie entsteht durch fehlende Constraints in der Stammdatenebene.
Die meisten Ladeplanungs-Engines optimieren Stauraum. Das ist ihre Aufgabe. Aber ohne explizite Definition der Schwerpunktkoordinaten verteilt die Software die Masse wie ein homogenes Fluid im Hohlraum. Das Ergebnis ist mathematisch elegant. Physikalisch instabil. Wenn du die Gewichtsverteilung über mehrere Ladeebenen nicht durch echte Traglasten und Stapelregeln begrenzt, simulierst du Papierkonstruktionen. In der Praxis kippt der Turm beim ersten Bremsmanöver. Oder der Spediteur lehnt die Übernahme ab. Die Ursache liegt selten in der Engine. Sie liegt in der Annahme, dass Normwerte reale Zustände abbilden. Eine EPAL-Tragekapazität von 1.500 kg ist ein Laborwert. Kein Feldbefund.
Stabilitätssimulationen rendern schöne Isometrien. Das hilft bei der Visualisierung. Bis die Toleranzen kollidieren. Die simulierte Kompression der untersten Lage ignoriert regelmäßig, dass Produktionschargen bereits minimale Verformungen aufweisen. Hier trennt sich die Spreu vom Weizen. Algorithmische Pläne sind Richtwerte. Sie kompensieren keine fehlende Datenhygiene. Und sie ersetzen keine manuellen Prüfungen, die nötig sind. Du musst die deklarierten Einzelgewichte gegen die tatsächlichen Frachtbriefe verifizieren. Du musst prüfen, ob die Palettenfeuchte die Reibung verändert. Und du musst lokal abgleichen, ob die Dock-Höhe und die Gabelstapler-Reichweite überhaupt den simulierten Sequenzen folgen. Ohne diese Validierung bleibt jede grüne Freigabe im System ein theoretisches Konstrukt.
Parametrisierung im Arbeitsbereich
Die Konfiguration muss schärfer sein als ein Standard-Formular. Falscher Ansatz: Außenmaße eingeben, Start drücken, hoffen. Sicherer Ansatz: Reale physikalische Grenzen, Toleranzwerte und Verstärkungsabstände im Solver hart verdrahten.
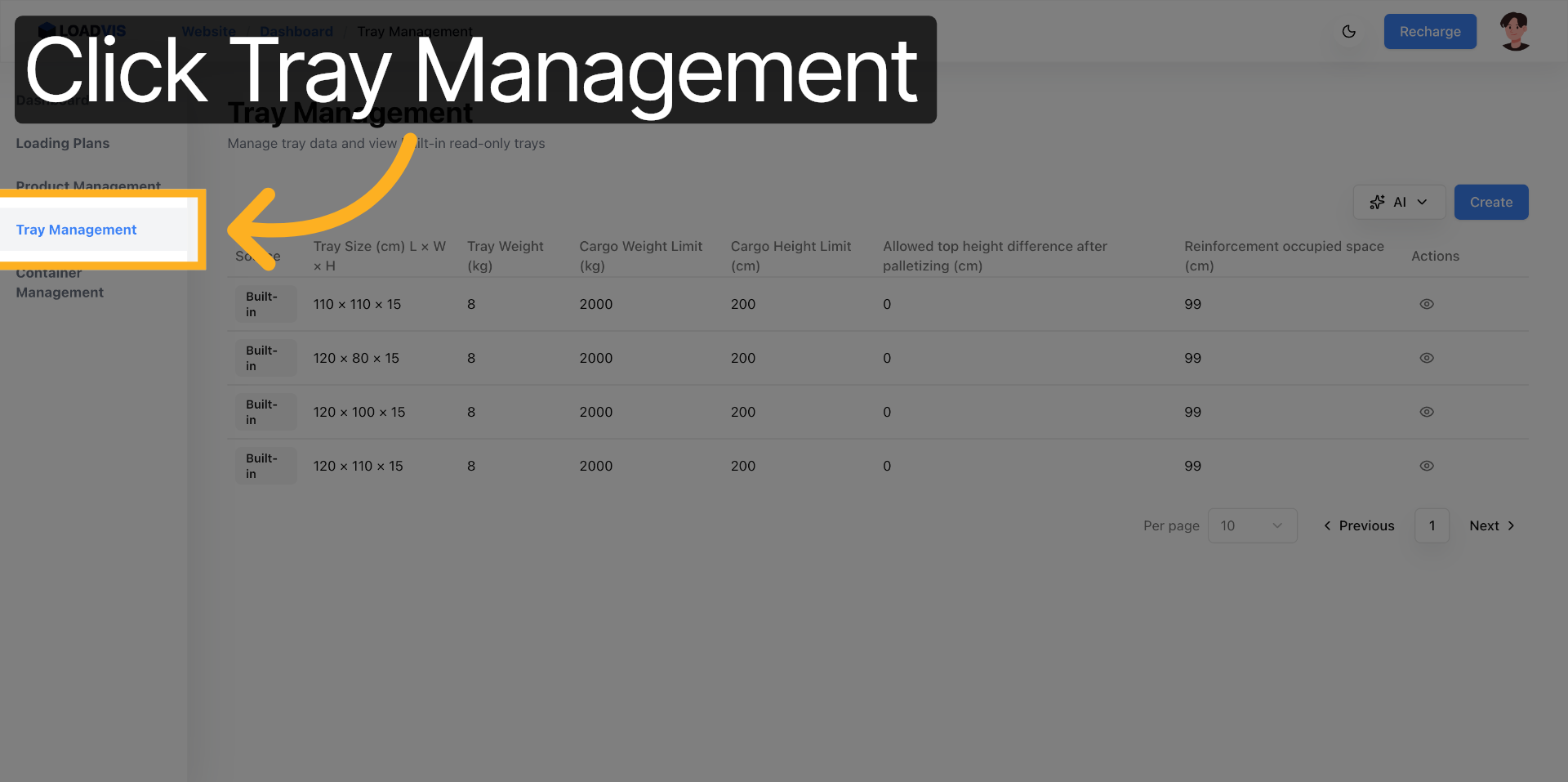
Der Einstieg beginnt nicht mit Code, sondern mit Struktur. Klick auf „Palettenverwaltung“. Der Bereich zur Konfigurationsverwaltung von Trays im System öffnet sich. Du siehst die erfassten Einträge. Rohe Daten. Ohne Kontext.
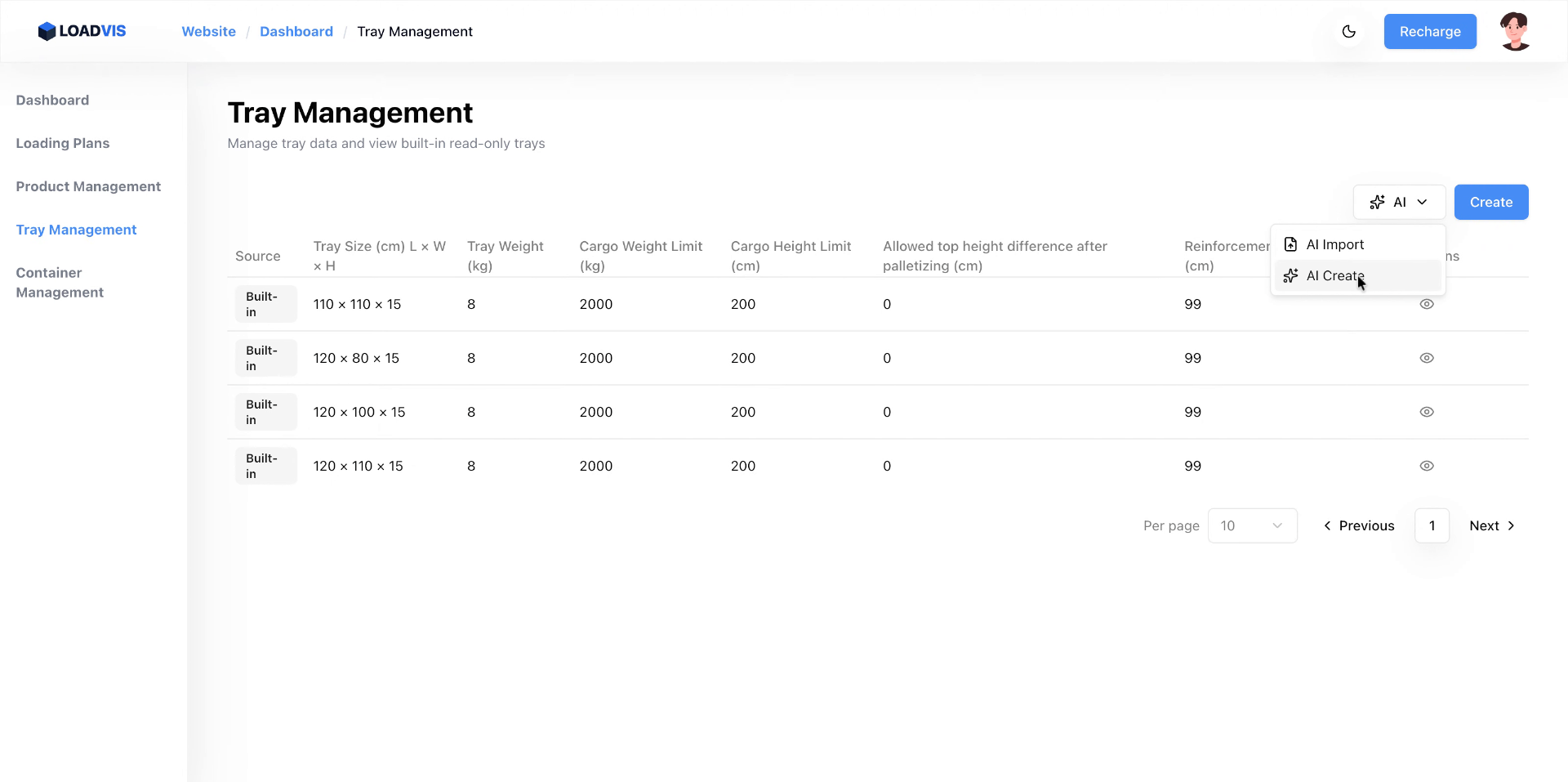
Statt manuell jeden Wert zu tippen, lohnt sich der gezielte Einsatz der Textextraktion. Aktiviere „KI erstellen“. Bestätige den Prozess. Jetzt kommt die Präzision ins Spiel. Gib keine vagen Beschreibungen. Füttere strukturierte Parameterblöcke. Beispiel: „Abmessungen 120×100×15 cm, Eigengewicht 20 kg, maximale Frachtlast 1.200 kg, maximale Frachthöhe 160 cm, Toleranz Oberhöhe 5 cm“. Das System parst, ordnet zu, speichert.
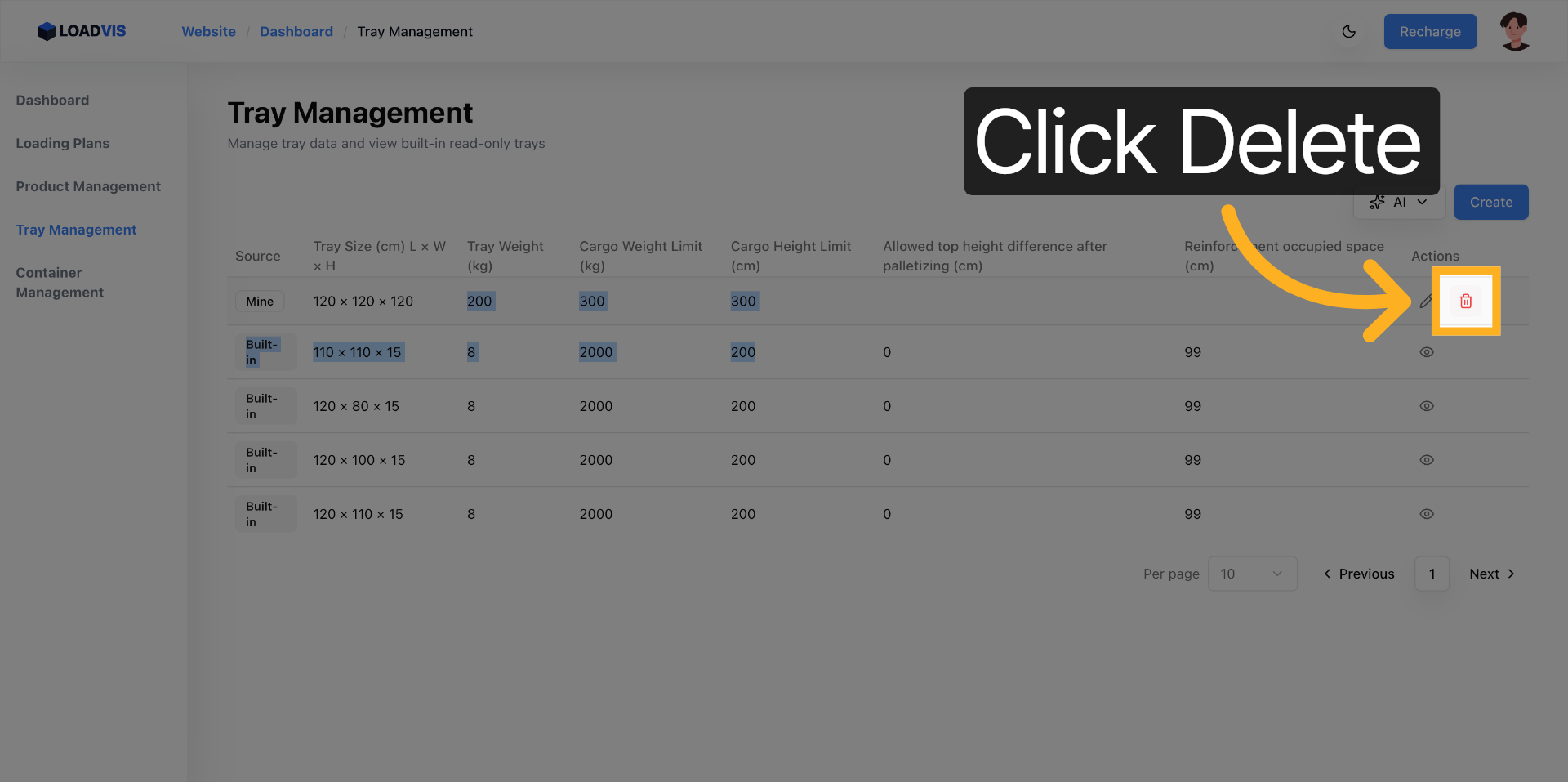
Die Erkennung funktioniert nur bei klaren Eingaben. Danach klickst du auf „Erkennen und speichern“. Die Metriken sind hinterlegt. Aber die Arbeit hört nicht auf. Datenbankpflege ist kein Set-and-Forget. Spezifikationen ändern sich. Holzchargen variieren. Wenn ein Tray-Datensatz veraltet ist, zieht er die gesamte Ladeplanung in den Abgrund. Löschvorgänge sind deshalb bewusst zweistufig. Klick auf „Löschen“. Das Dialogfeld erscheint. Du bestätigst. Der Eintrag verschwindet permanent. Kein Rollback. Saubere Tabellen priorisieren Genauigkeit über Vollständigkeit.
Manchmal musst du bestehende Parameter nachjustieren. Breite. Höhe. Freiraum für Stabilisiergurte. Die Engine berechnet nur das, was im Feld steht. Detailansichten helfen. Finde die Zielpalette. Klick auf „Anzeigen“. Prüfe die Dimensionen. Schließe das Panel. Zurück zur Liste. Routine? Ja. Notwendig? Zwingend. Manuelle Prüfungen, die nötig sind, wiederholen sich im Zyklus von Datenpflege und Ladesimulation. Ohne sie degeneriert der Solver zu einem Zufallsgenerator.
Wenn die Simulation die Realität verfehlt
Was passiert, wenn die Software eine Grenzwertüberschreitung wirft? Ignorieren ist keine Option. Die Warnmeldung ist kein Hindernis, sondern ein Korrektiv. Du hinterfragst die Eingabematrix. Ist die Stapelhierarchie logisch? Wurde der Schwerpunktversatz zur Containermitte korrekt gewichtet? Oft reicht bereits eine Anpassung der Höhendifferenz um 2–3 cm auf der zweiten Ebene, um die Kippstabilität zu erhöhen, ohne Volumenkubikmeter zu opfern. Aber nur, wenn der Algorithmus diese Variable als harte Constraint erkennt. Füllrate und Achslast stehen in direkter Konkurrenz. Du kannst nicht beides maximieren. Du musst priorisieren.
API-Antworten sind sauber. Die Rampe ist es nicht. Keine Schnittstelle korrigiert falsch deklarierte Nettogewichte im Lieferschein. Kein 3D-Renderer erkennt, ob ein Karton durch Produktionsdruck an der Seite ausgebeult ist. Und keine Cloud-Simulation weiß, dass der lokale Gabelstapler bei maximaler Hubhöhe instabil wird. Du musst diese Brüche manuell abfedern. Manuelle Prüfungen, die nötig sind, schließen immer die physische Verifikation der Lastverteilung vor dem Schließen der Containertüren ein. Die finale Freigabe liegt beim Verladeteam. Nicht beim Dashboard.
Volumenoptimierung ohne Gewichtslogik ist teure Augenwischerei. CBM-Werte glänzen in Reports. Sie schützen dich nicht vor umgekippten Ladungen oder abgewiesenen Frachtbriefen. Reale Constraints im Solver zu definieren, ist der einzige Weg, algorithmische Fehlschläge einzudämmen. Die Software liefert die Projektion. Du lieferst die Validierung. Die Rampe bleibt die letzte Instanz. Sie urteilt nicht nach Pixeln, sondern nach Physik.