積載計画の実現場検証:体積達成と物理的実行可能性の乖離シナリオ
画面のシミュレーションは整然としている。現実はそうではない。アルゴリズムが吐き出す「体積稼働率89%」という数値は、数学的には正しい。しかし物理的には無力だ。積載計画が倉庫のドックで停止する瞬間、誰もが同じ疑問を抱く。なぜ計算結果は現場で機能しないのか。答えは単純だ。数値は空間を占有するが、質量や摩擦、人間の動作余白を考慮しない。計画立案者と荷役担当者の視点は、そもそも座標軸が異なる。
1. 体積達成が頓挫する3つの物理的シナリオ
理論上の詰め込み最適化は、往々にして以下の境界条件で破綻する。
入口・扉寸法によるブロック アルゴリズムはコンテナの内部体積を長方形の集合体として扱う。だが現実の貨物は、必ずどこかから挿入される。20ftドライコンテナの扉開口高さ(通常約2,134mm)に対し、計画上は縦積みが成立している場合、現場ではパレットごと扉枠に干渉する。特に背の高い機械部品や段積みパレットが該当する。入口径より大きいオブジェクトは、コンテナ内配置が最適でも、そもそも入らない。
重心偏差・重量不均等による転倒リスク 体積が満タンでも、質量分布が偏れば話は別だ。アルゴリズムは「空間充填」を優先し、重量バランスを二次的な制約として処理することが多い。コンテナの床面許容荷重や左右軸の重心ズレが±5%を超えた場合、輸送中の揺れでパレットが倒壊するだけでなく、トラックの横転リスクが指数関数的に跳ね上がる。重い鉄鋼材が片側に固着し、軽い紙製品が反対側に配置されるシナリオは、数字上は効率的でも、物理的には自殺行為だ。
フォークリフト作業余白とパレット変形率の無視 計算機は剛体を仮定する。現場のパレットはたわむ。木製パレットなら荷重で数ミリ沈む。ラップフィルムの張力不足で貨物が微変形する。さらに、フォークリフトのフォーク挿入には前方に最低600mmの作業スペースが必要だ。アルゴリズムが隙間を10mm単位で埋め尽くした場合、フォークが入らず、計画は白紙に戻される。
2. なぜアルゴリズムは盲点を残すのか
過小評価の根源は、データ入力時の過度な簡略化と、最適化関数の純粋な数値依存にある。多くの計画担当者は、入力フォームに理想寸法を入力するだけで満足する。実際には梱包材のオーバーハングや段ズレを無視する。アルゴリズムは与えられたパラメータに対して忠実すぎるため、入力データが不完全ならば出力結果も不完全になる。加えて、現場の知見は属人化されがちだ。「この倉庫のドックは雨の日に滑る」「あのフォークリフトは回転半径が大きい」といった暗黙知は、システムに構造化されないまま、個人の記憶に閉じ込められる。計画と実行の間に介在するノイズが、意図的に切り捨てられているのだ。
3. 検証フローの実装:自動計算への盲信と確実なアプローチの分岐点
計画の質は、計算を実行した後に決まる。単に「容積率を信じて承認ボタンを押す」のは、事故への招待状に等しい。確実なアプローチは、多角的な視点での干渉検証と明細の照合に依存する。以下に、計画標準化から結果検証までの実務フローを抽出する。
計画の骨格定義と保存
まず、計画名の標準化が必須だ。バッチ番号や出荷先、緊急度を命名規則に組み込まないと、過去計画との差分比較が不可能になる。
「作成」から初期設定ダイアログを呼び出す。
命名規則に則ったタイトルを入力し、
「保存」で永続化する。

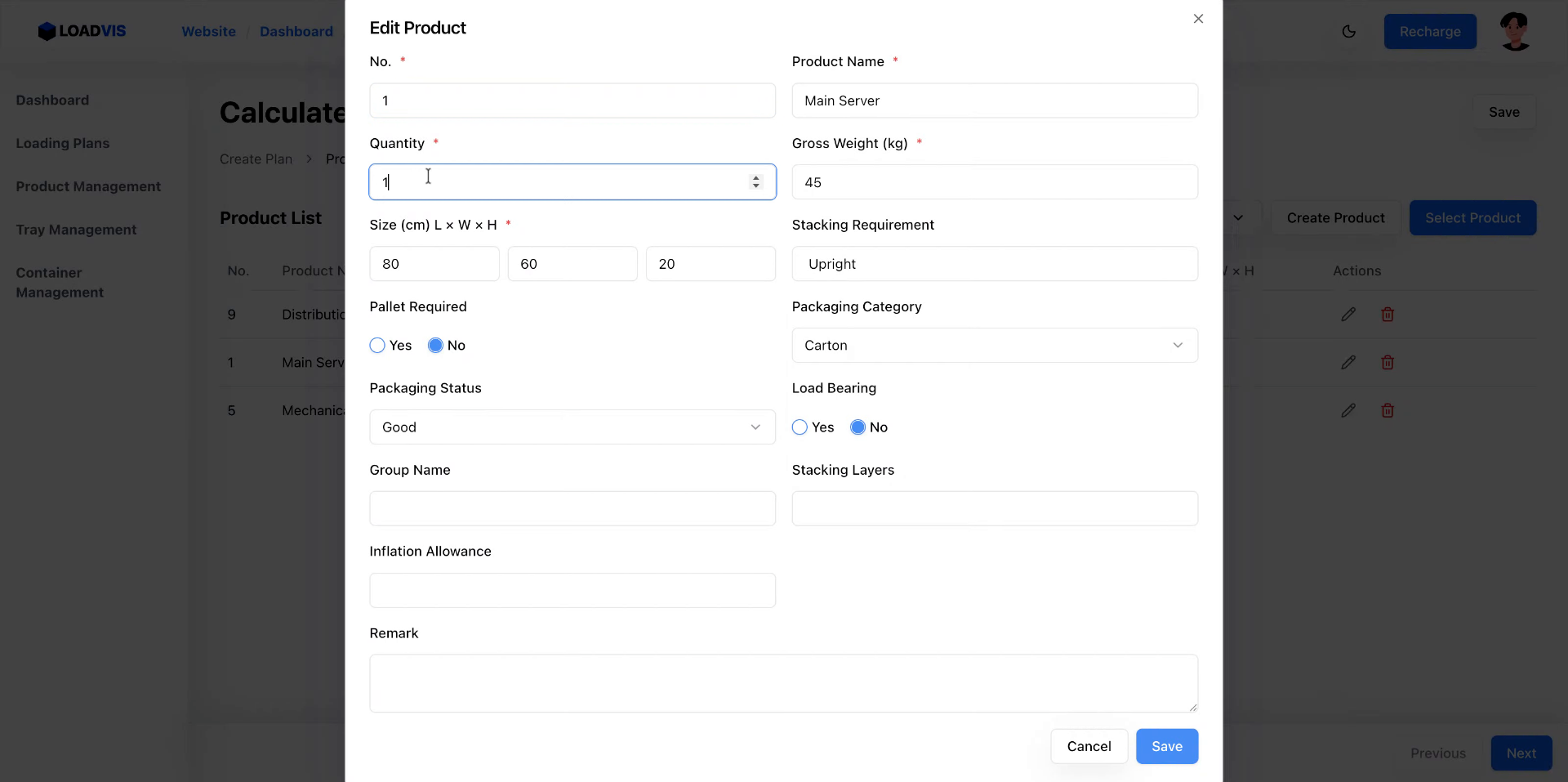
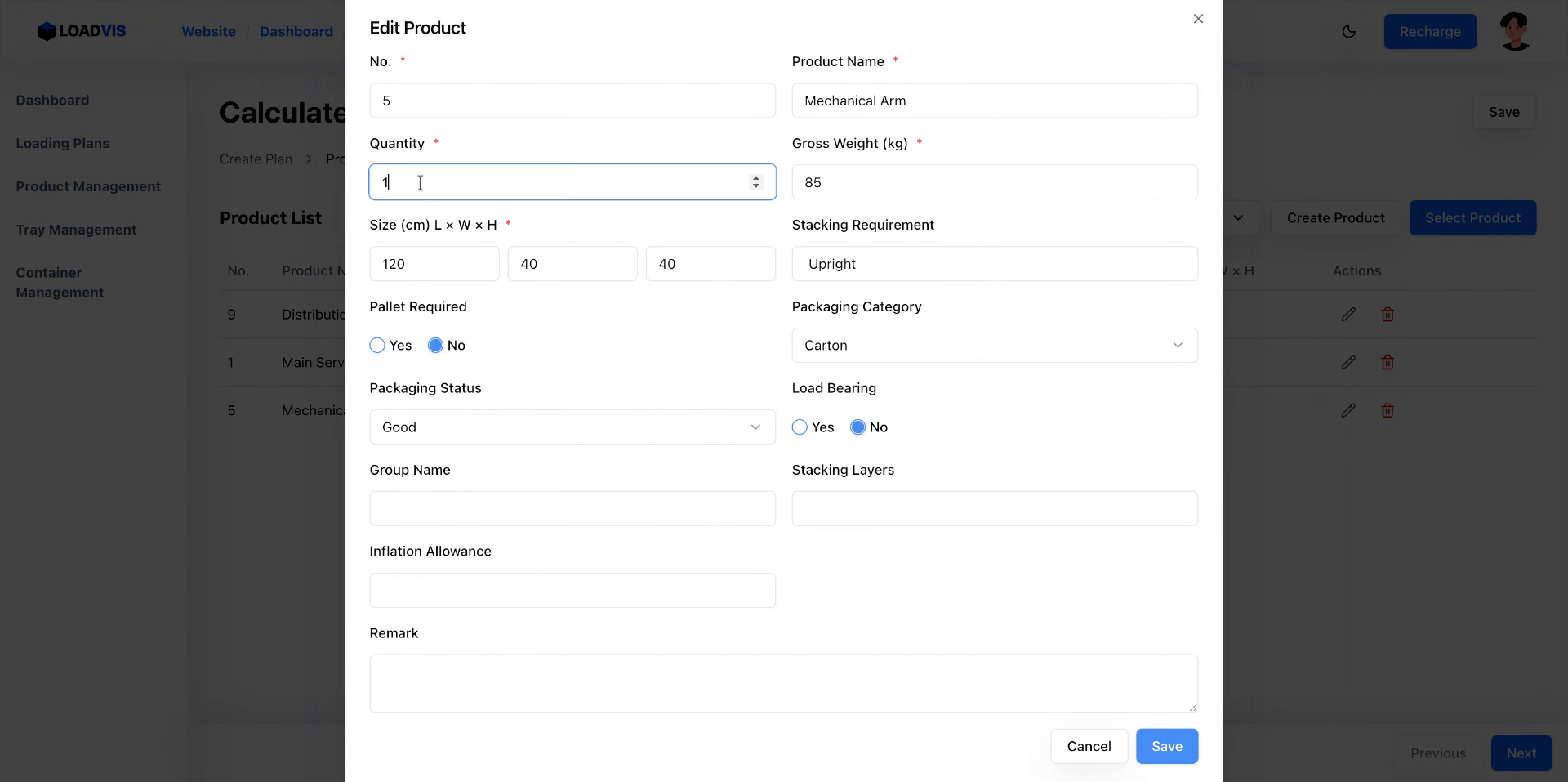
数量・容器設定と計算実行
貨物入力は、現実の変動係数を見越してマージンを取るべきだ。
管理エリアに入り、
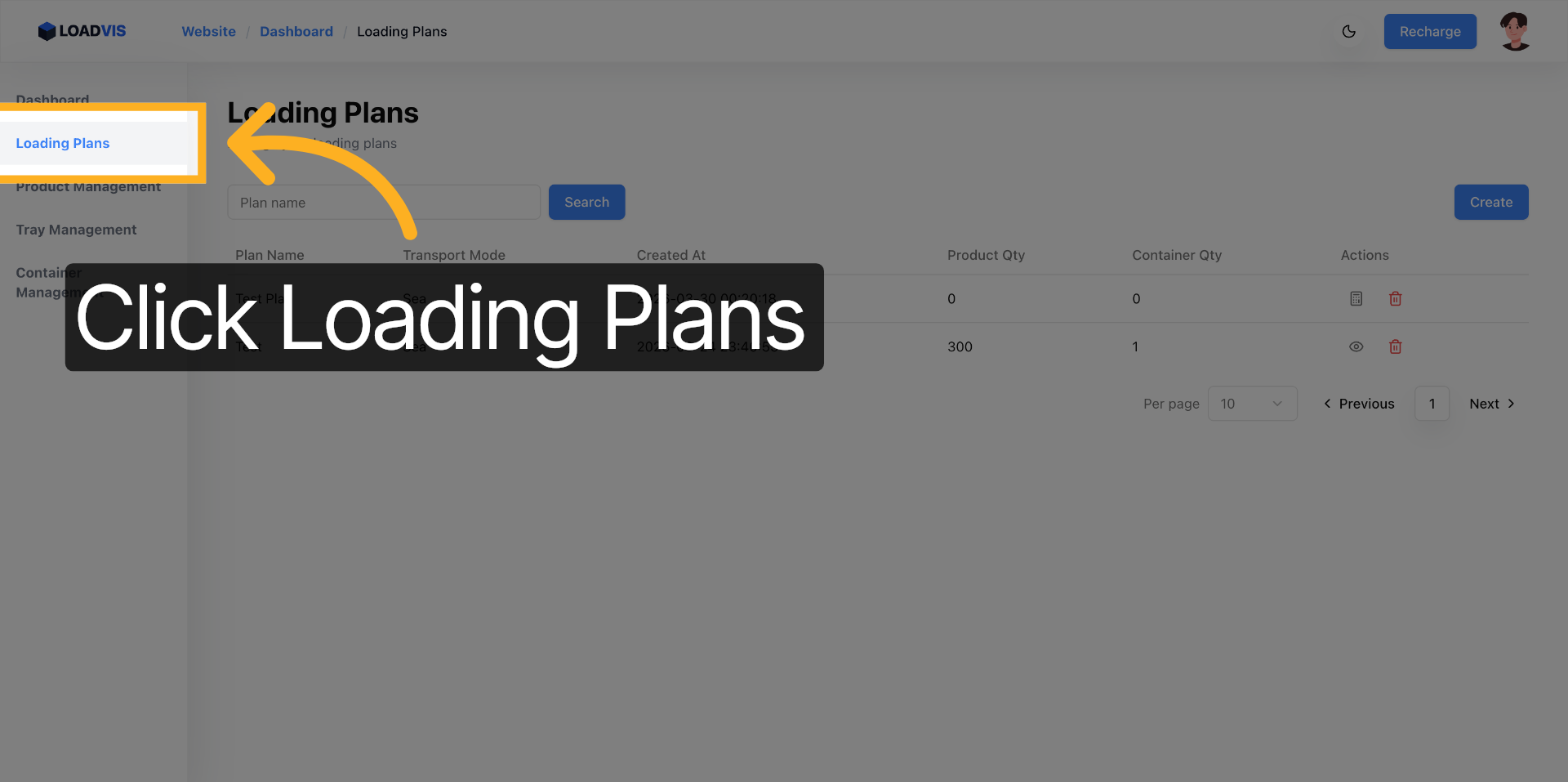
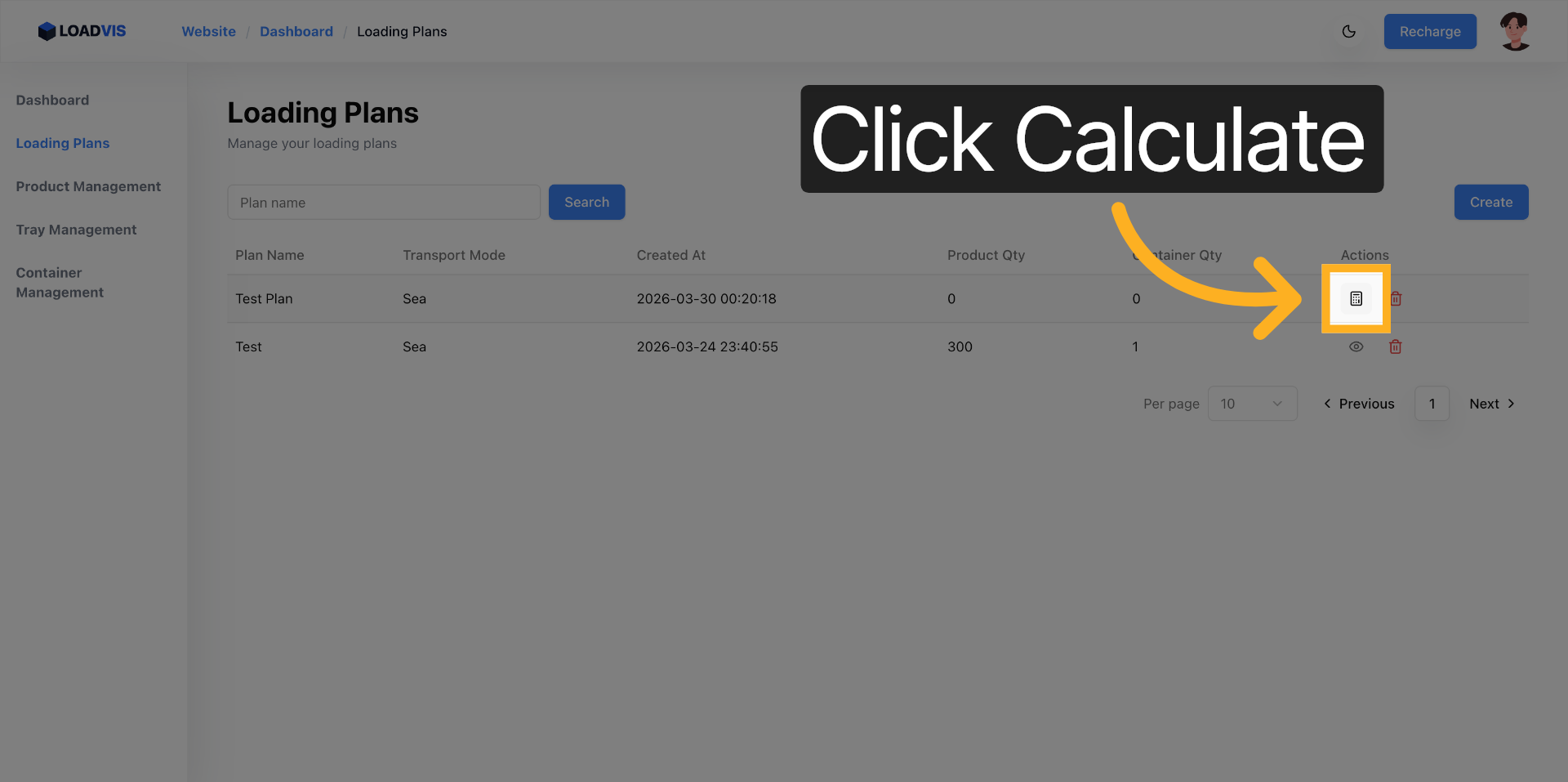
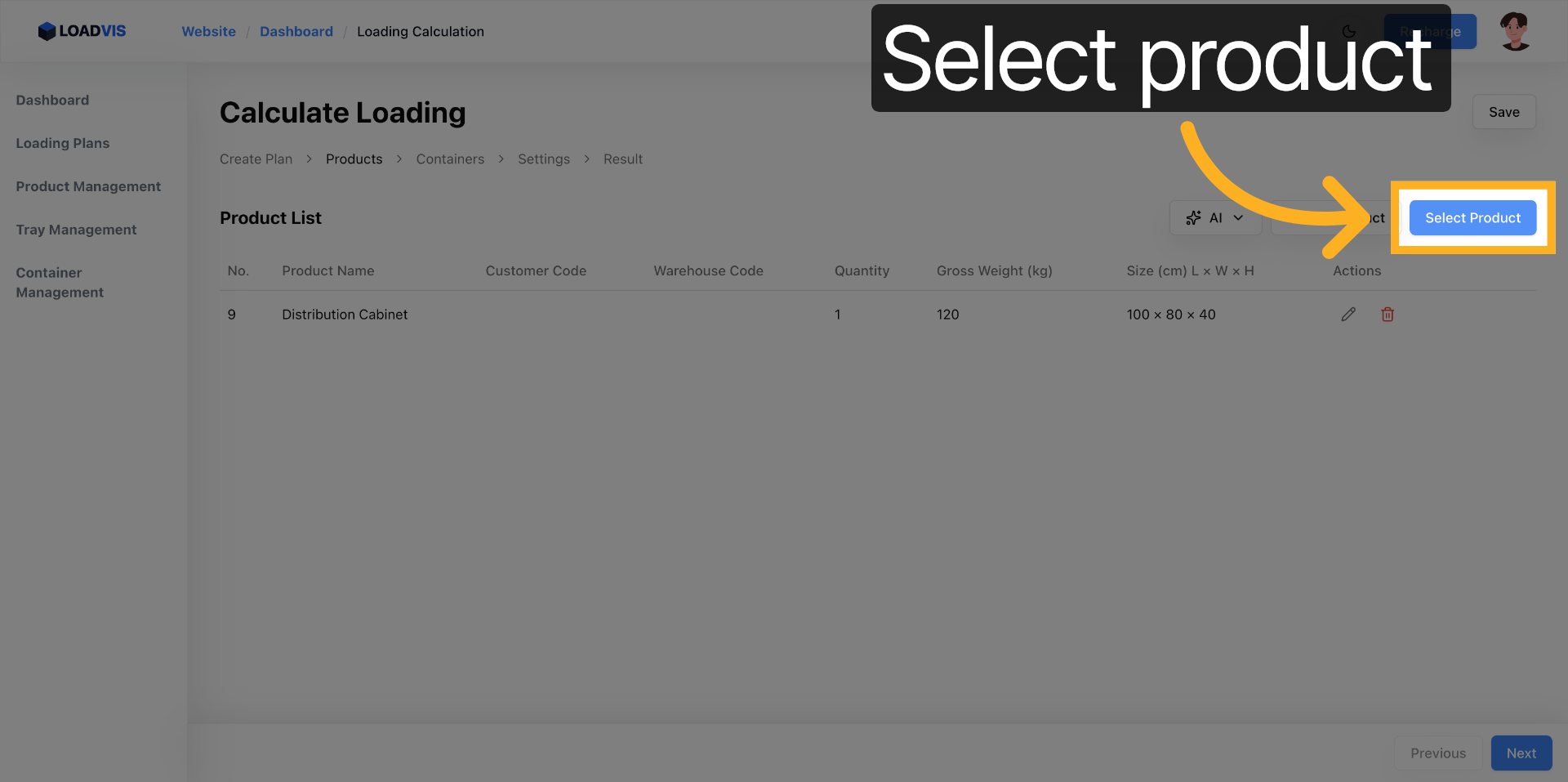
対象計画の「計算」からデータ入力へ進む。
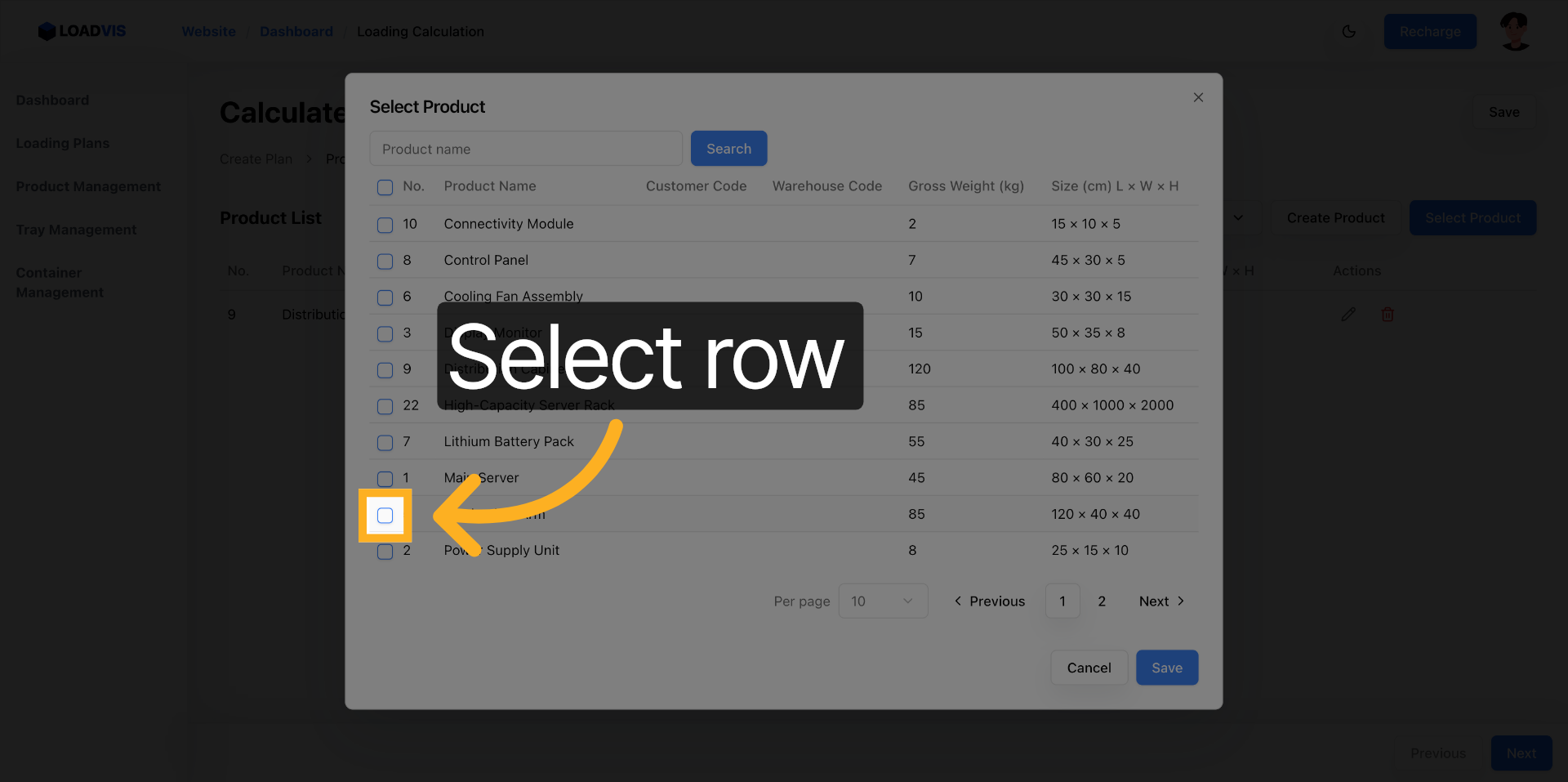
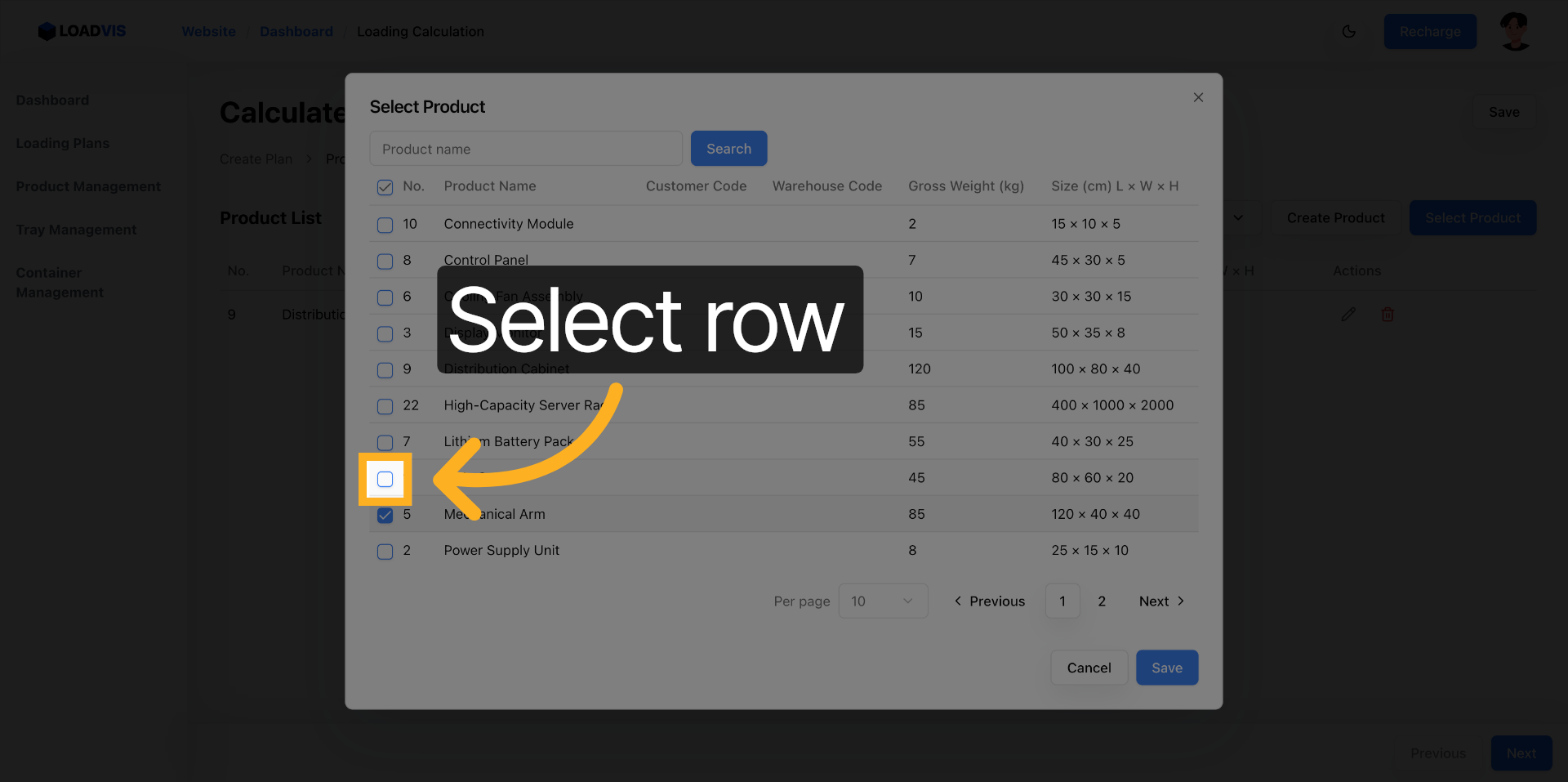
製品選択ダイアログで対象アイテムを検索・追加。
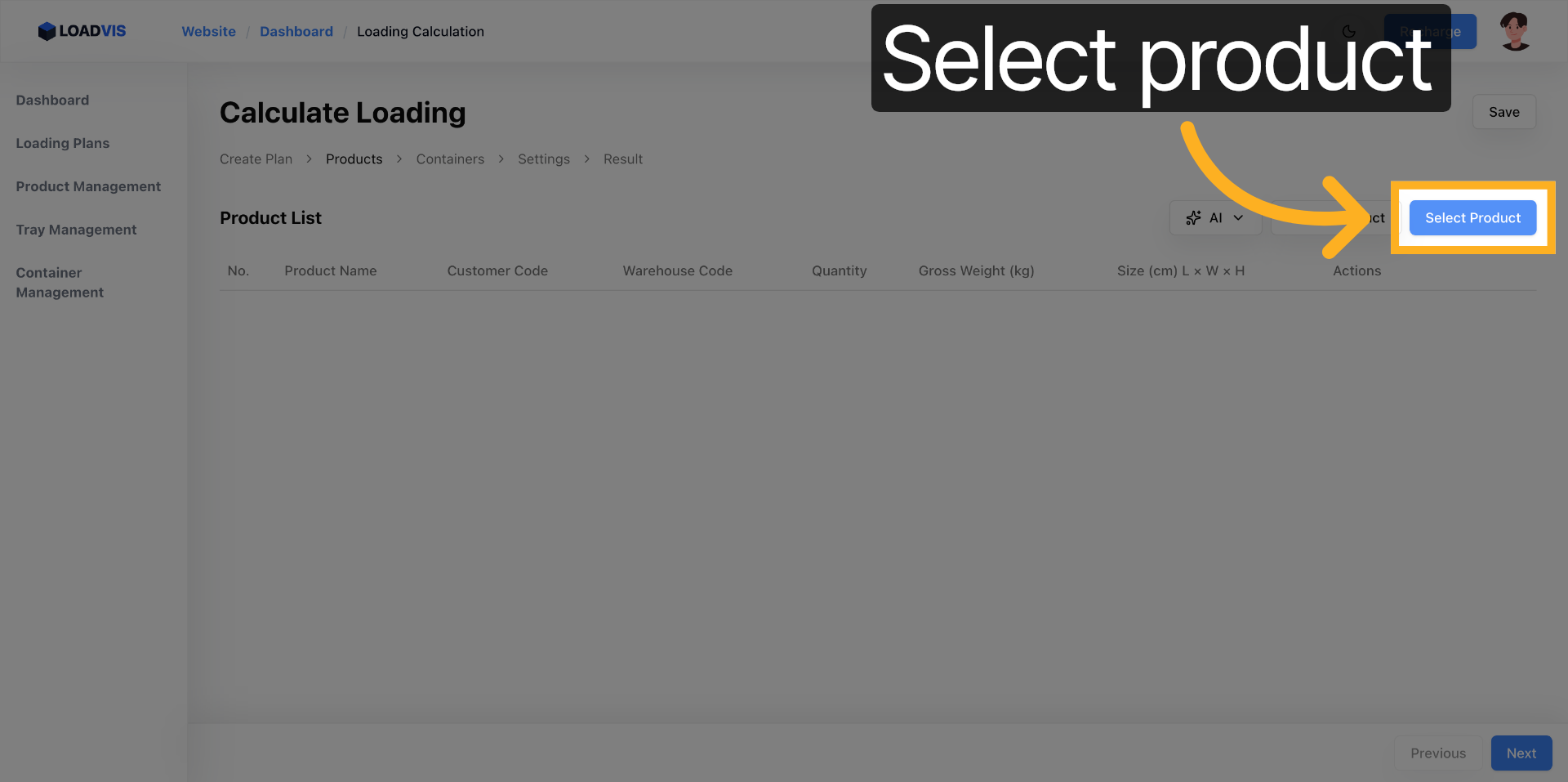 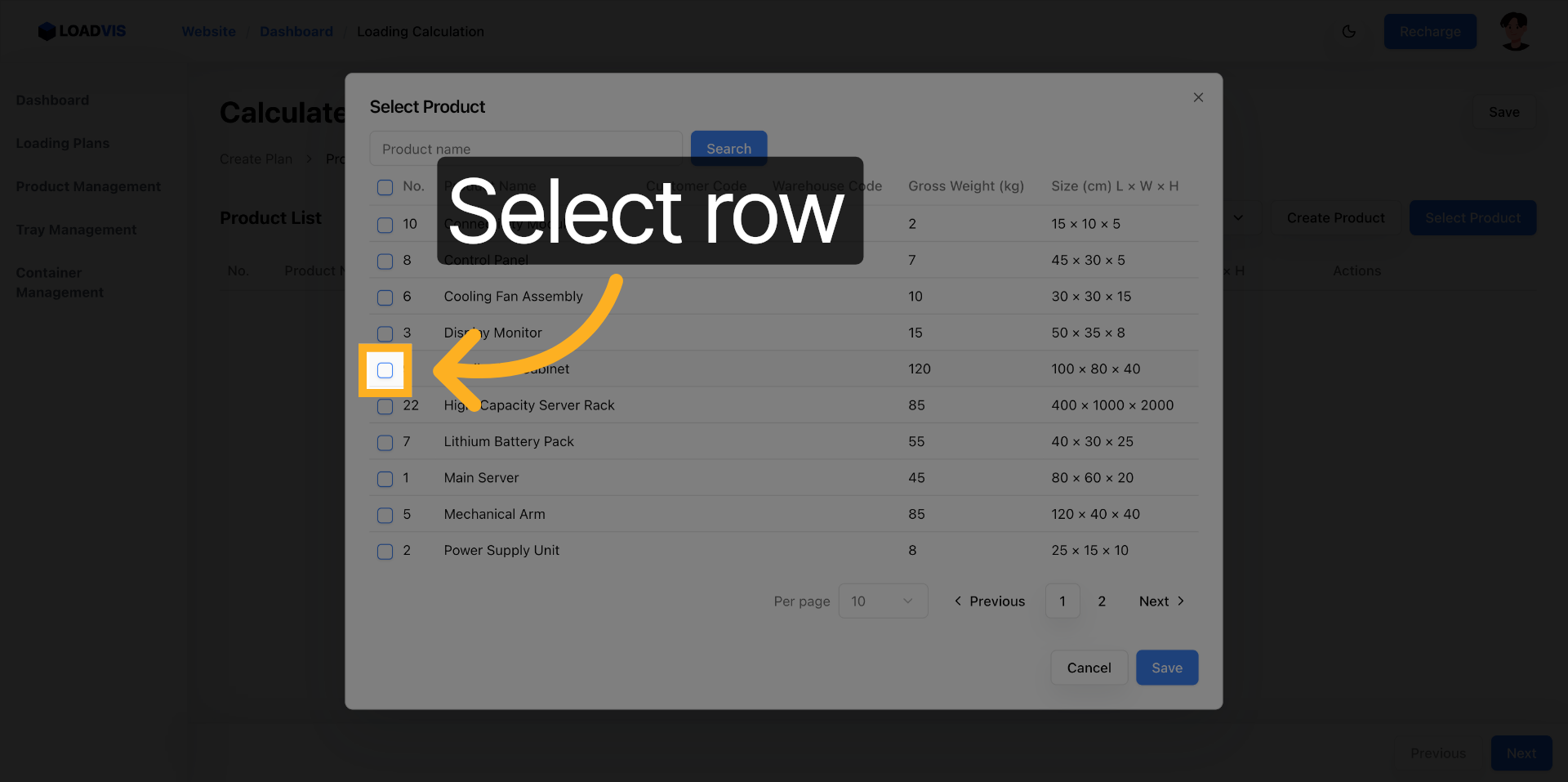 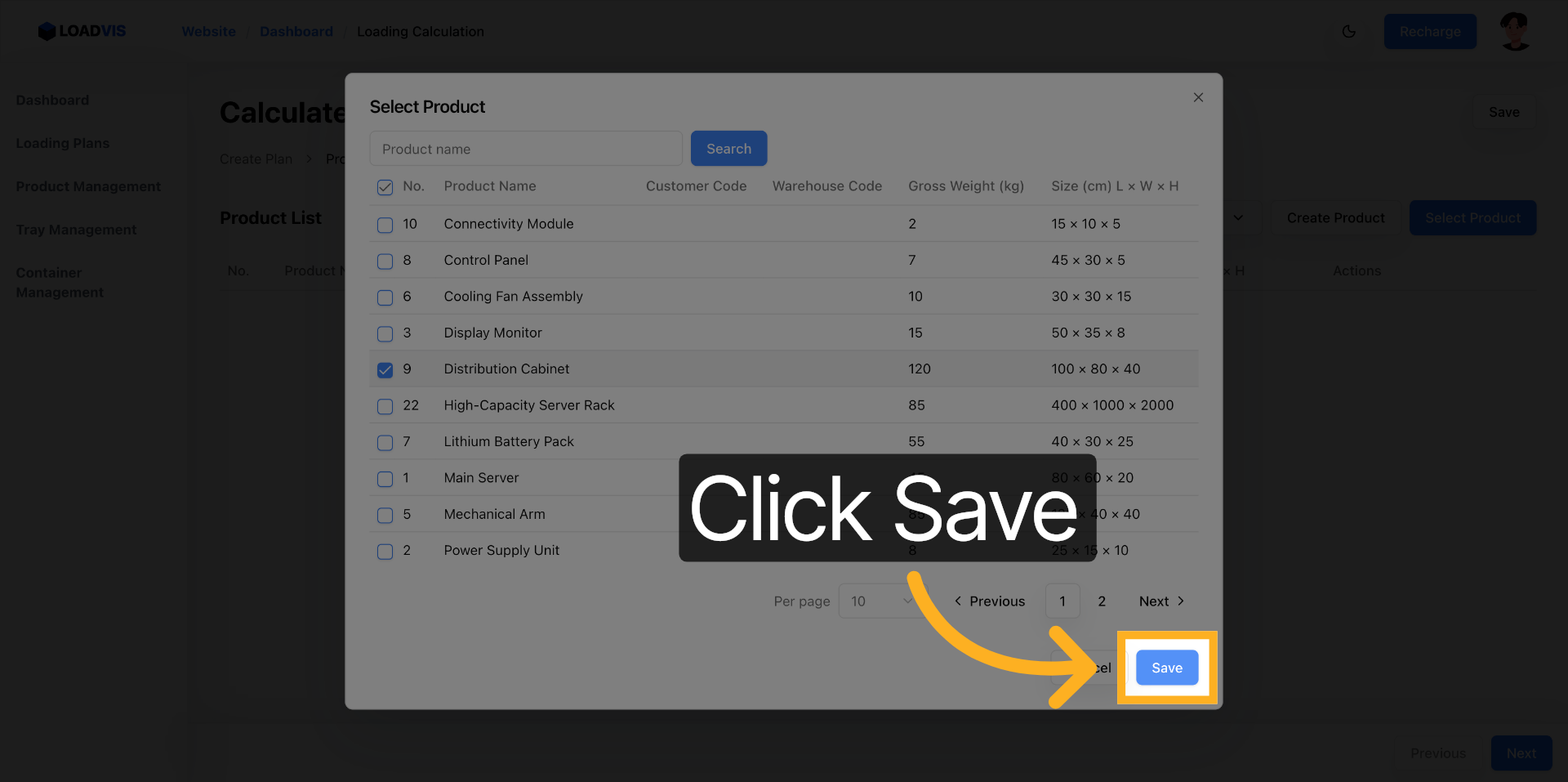
複数製品の同時インポートも可能だ。
   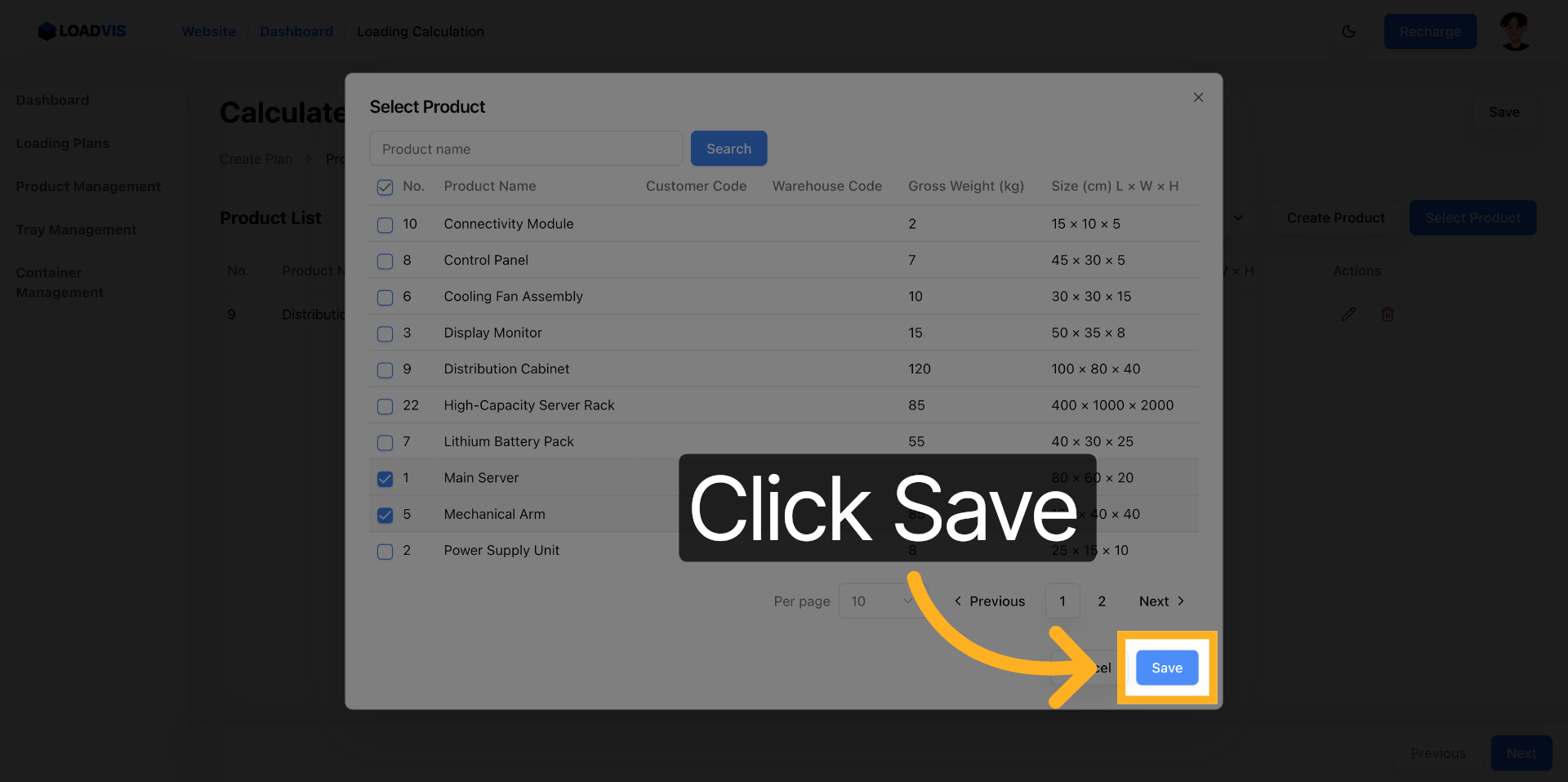
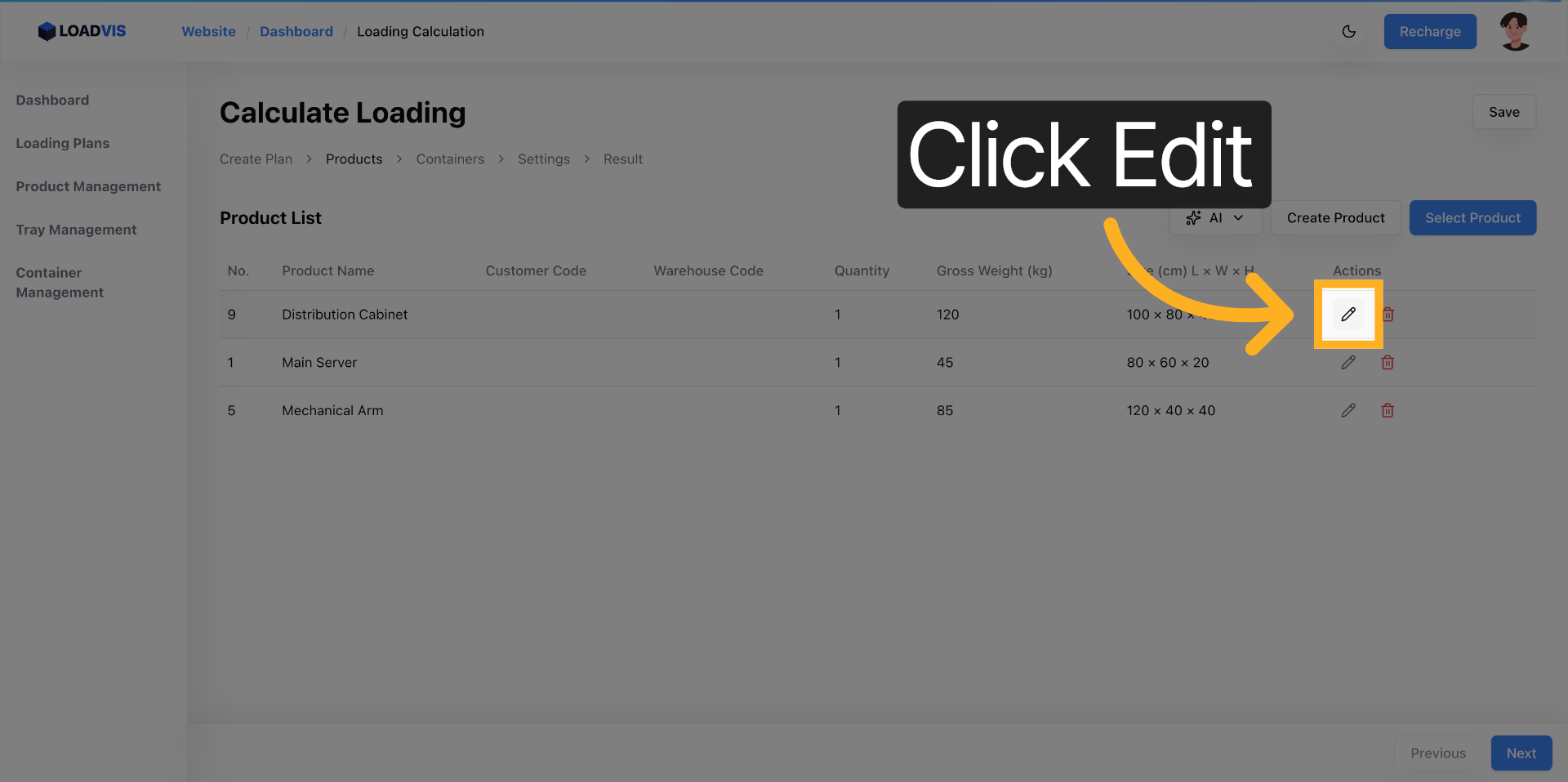
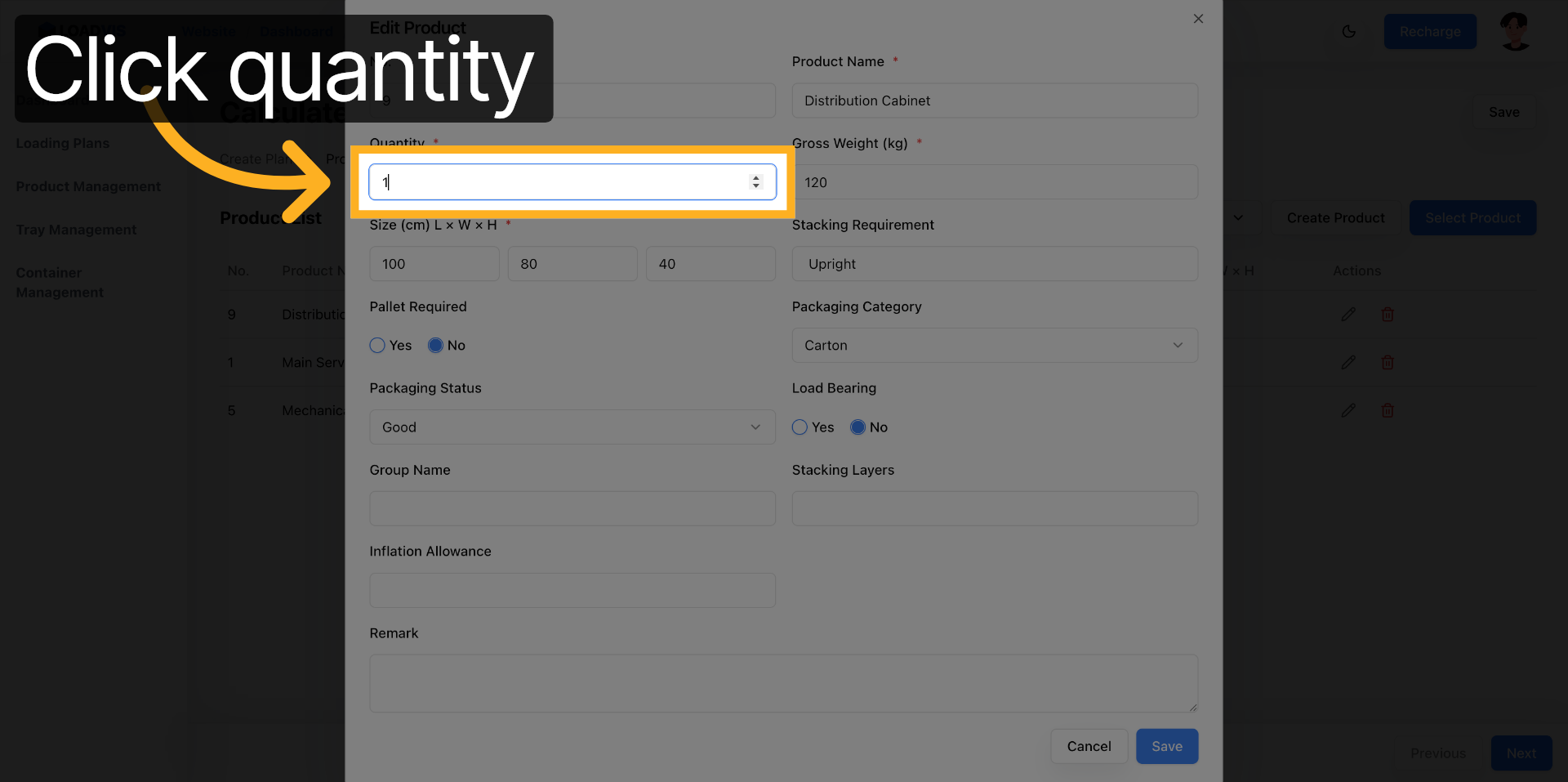
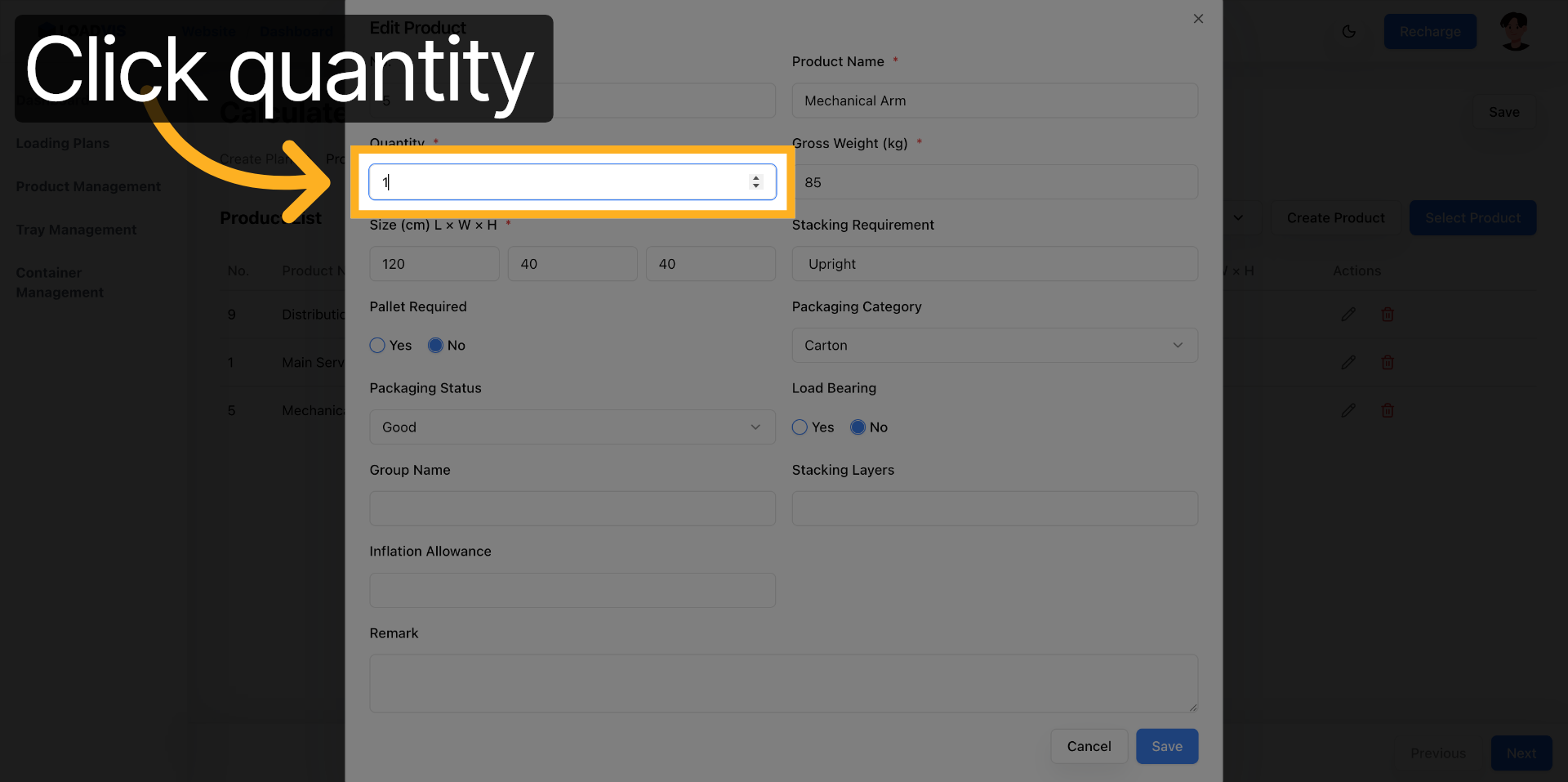
数量は実在庫の±3%変動を織り込めるよう、フィールドを個別に編集する。
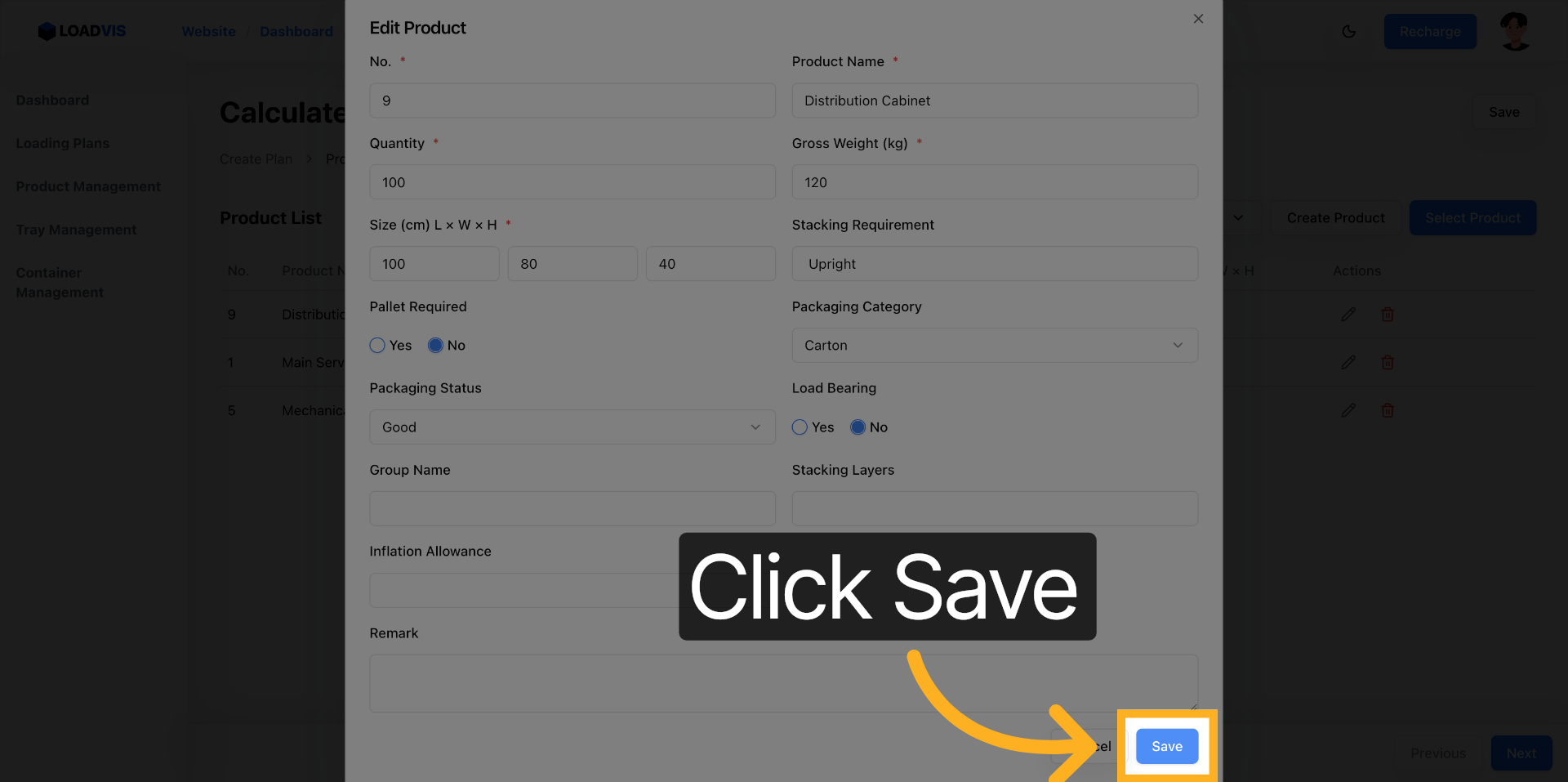
値を100に設定、
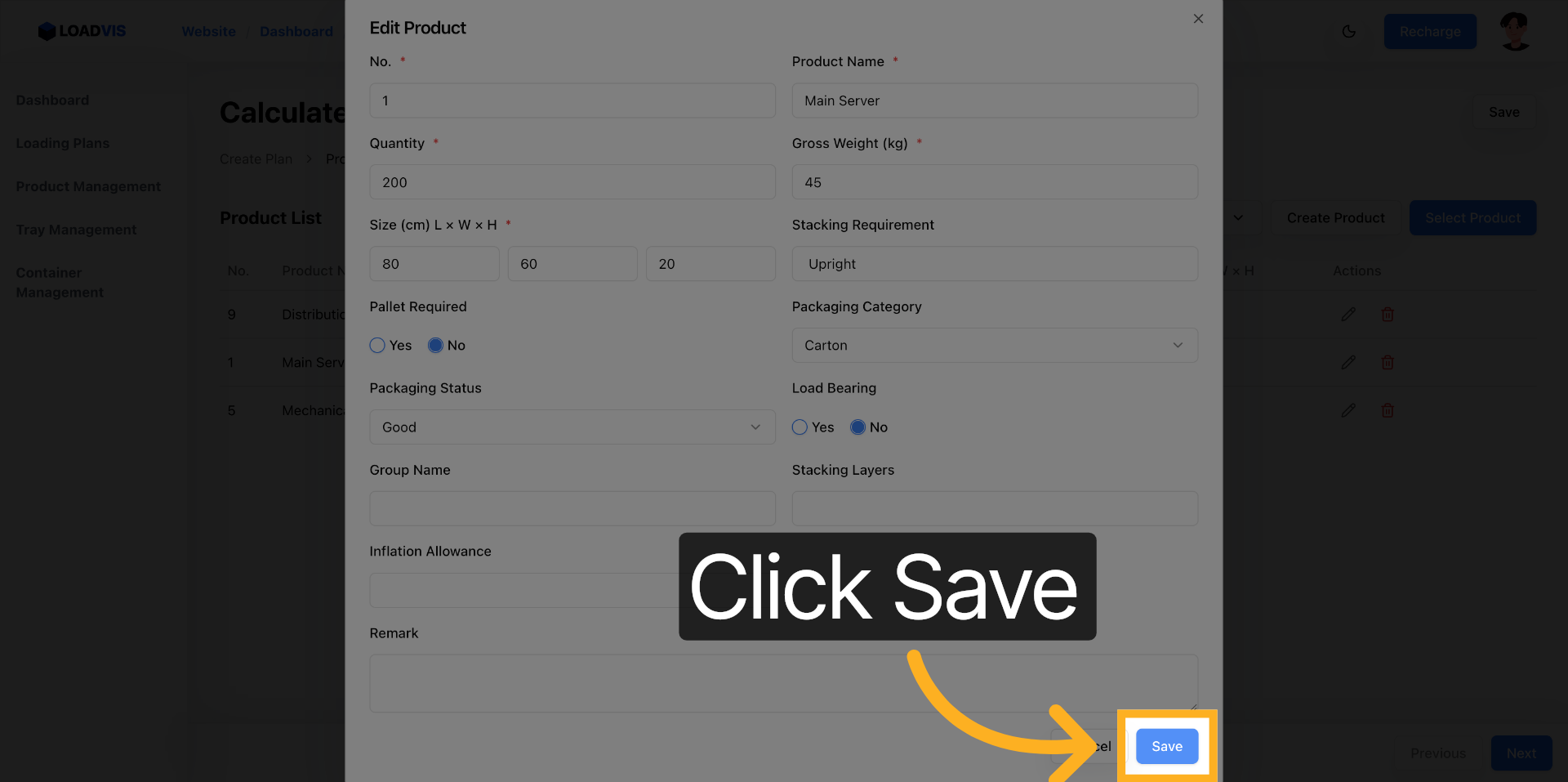
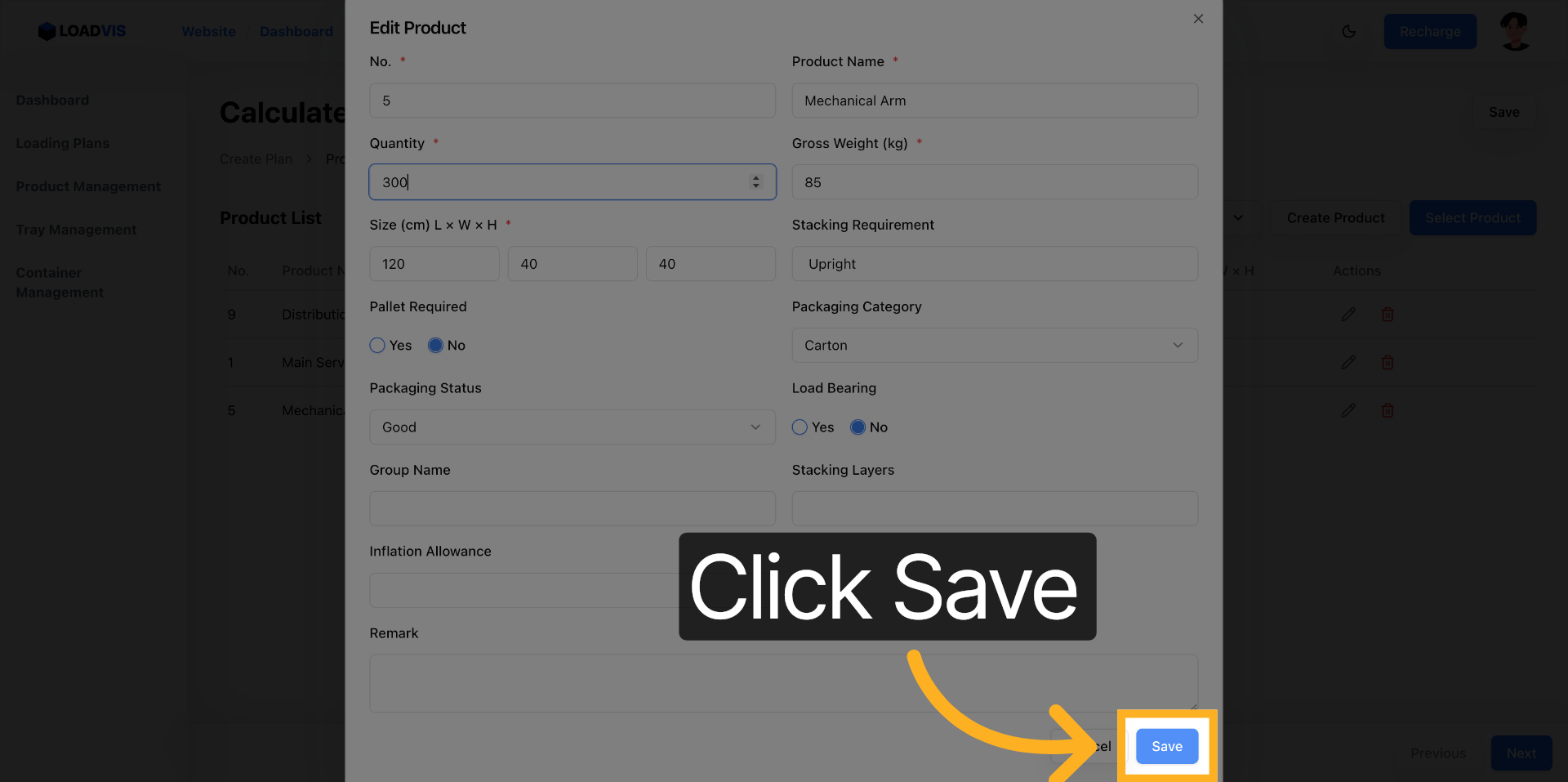
確定保存。
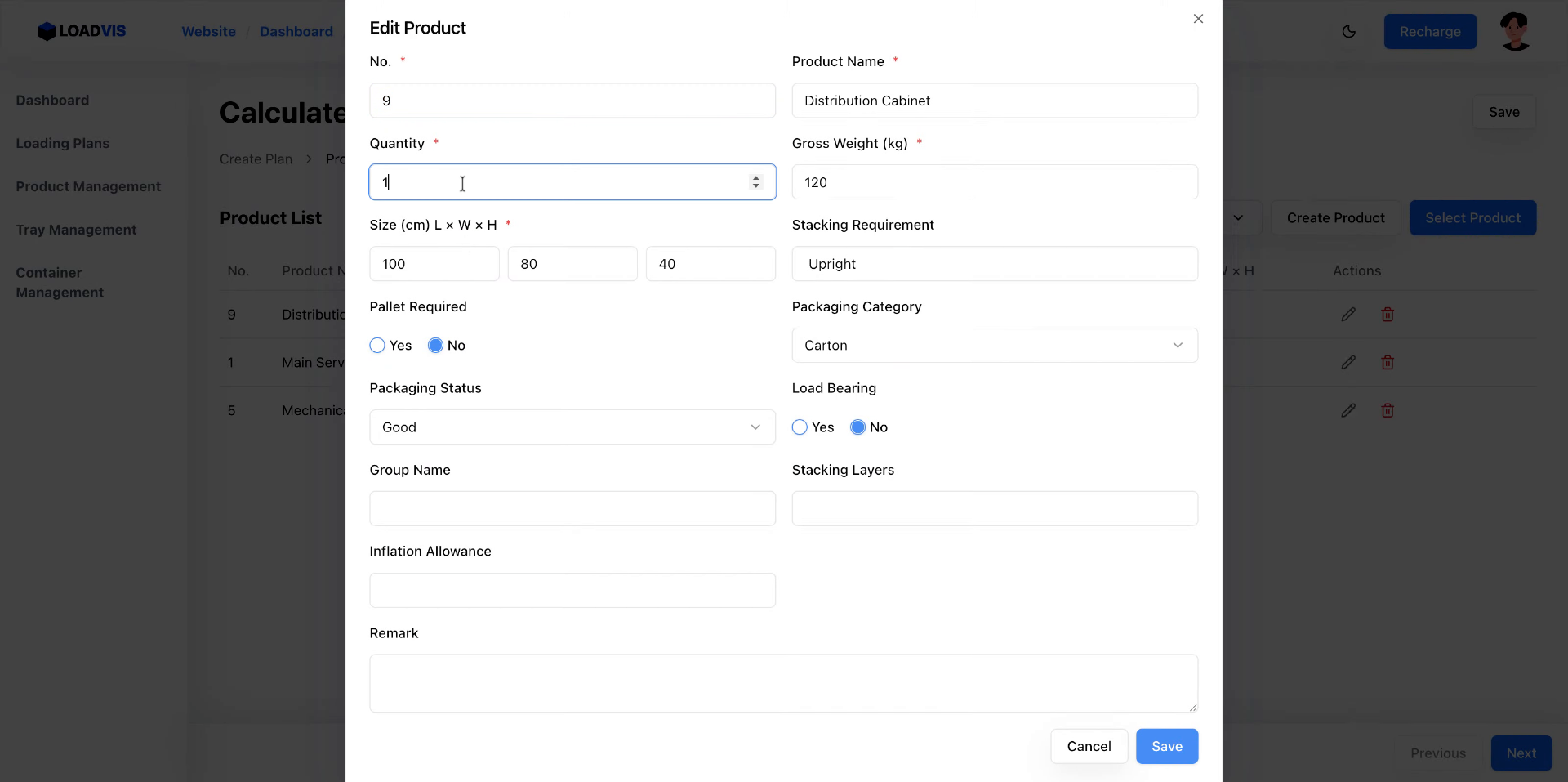
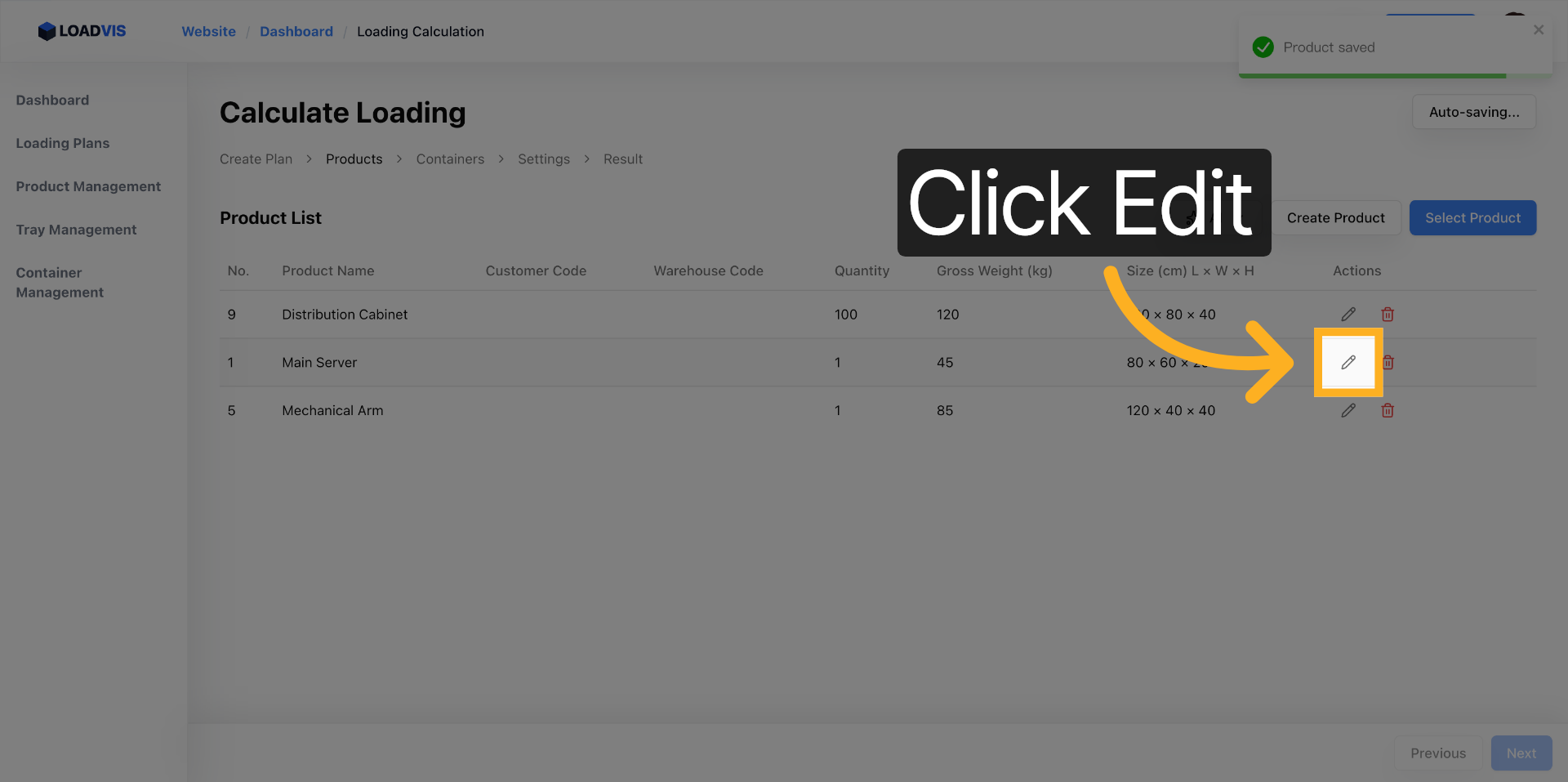
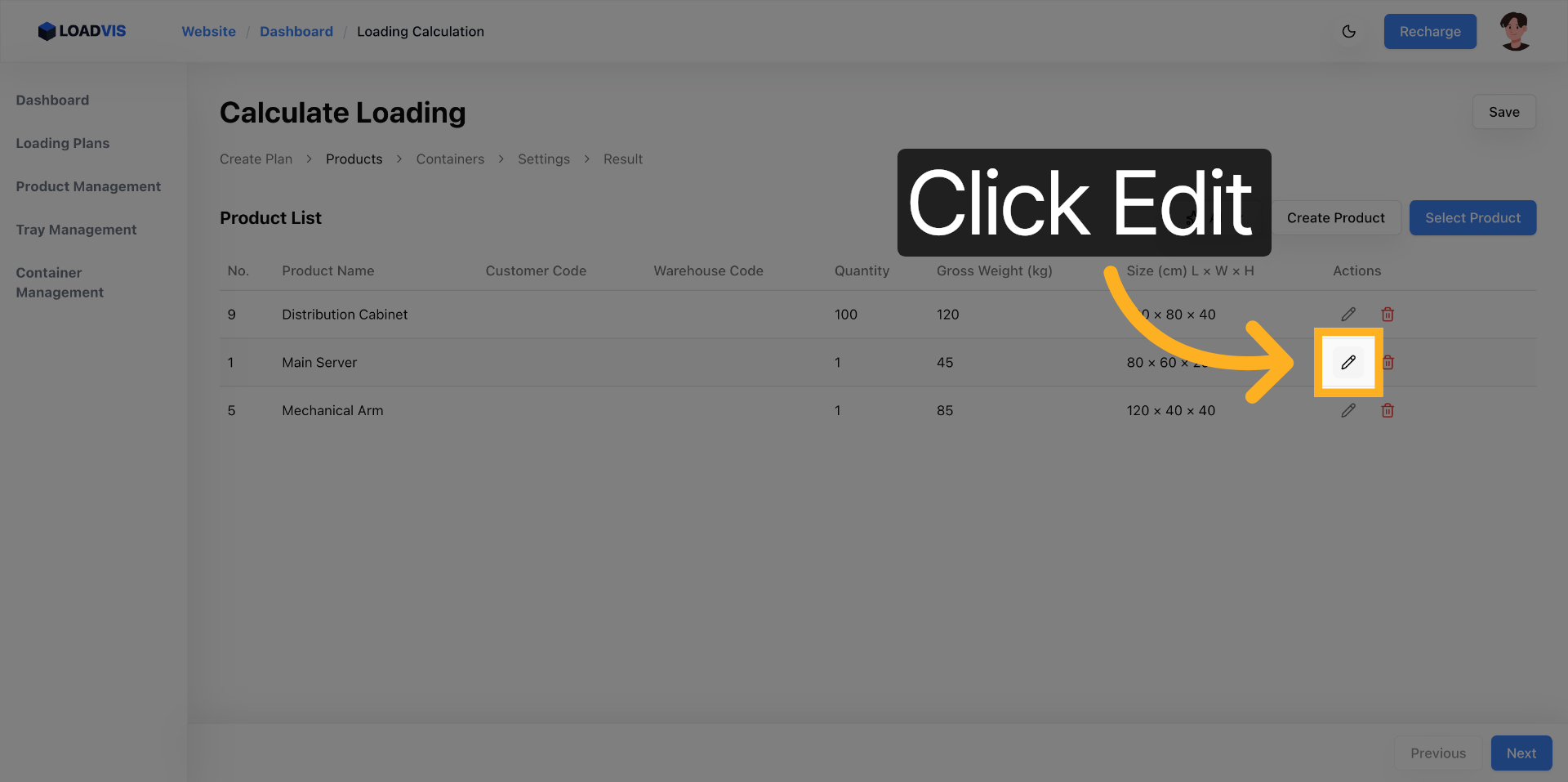
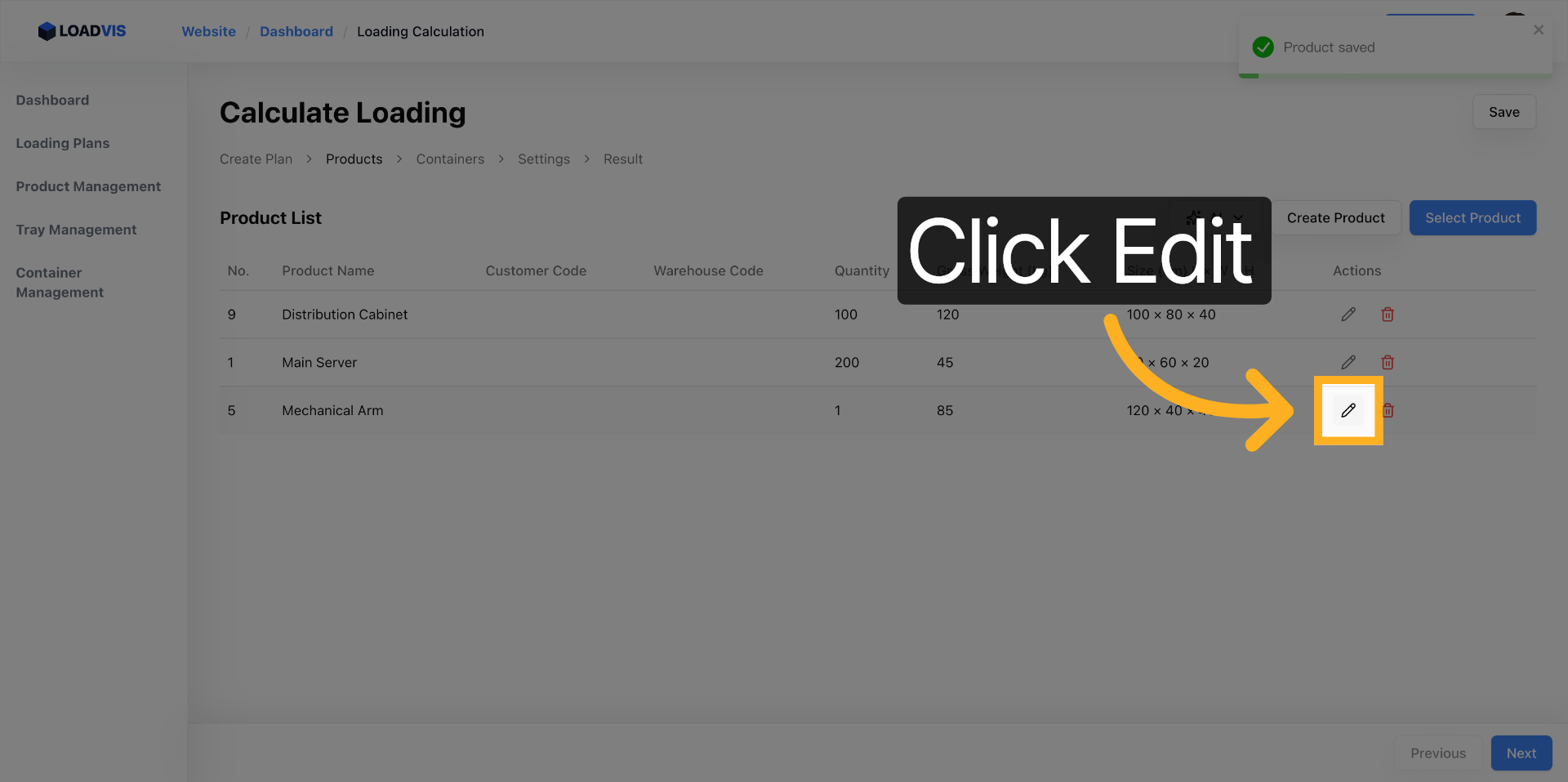
同様に2番目の製品を編集。
  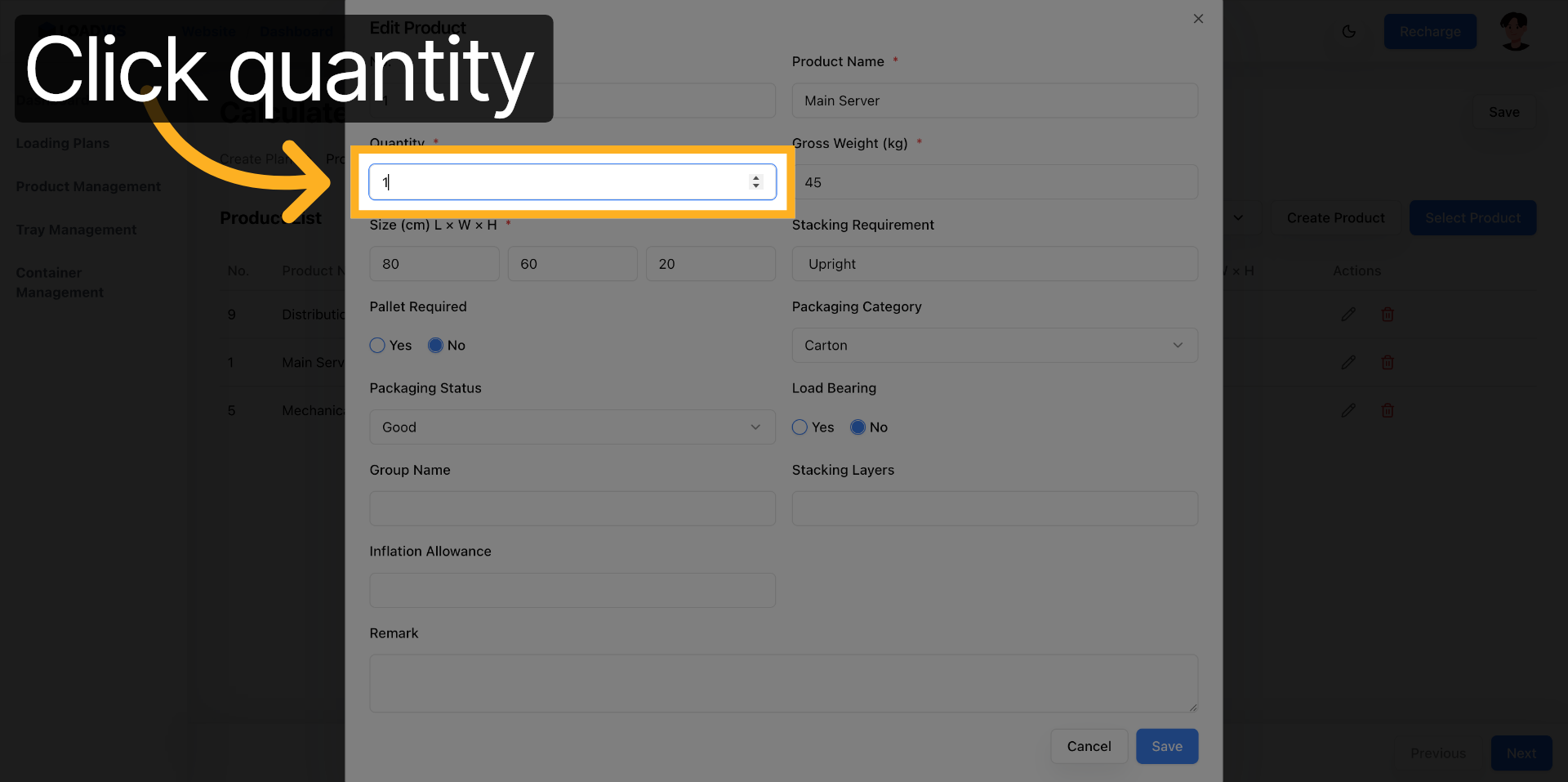
200へ変更、
保存。
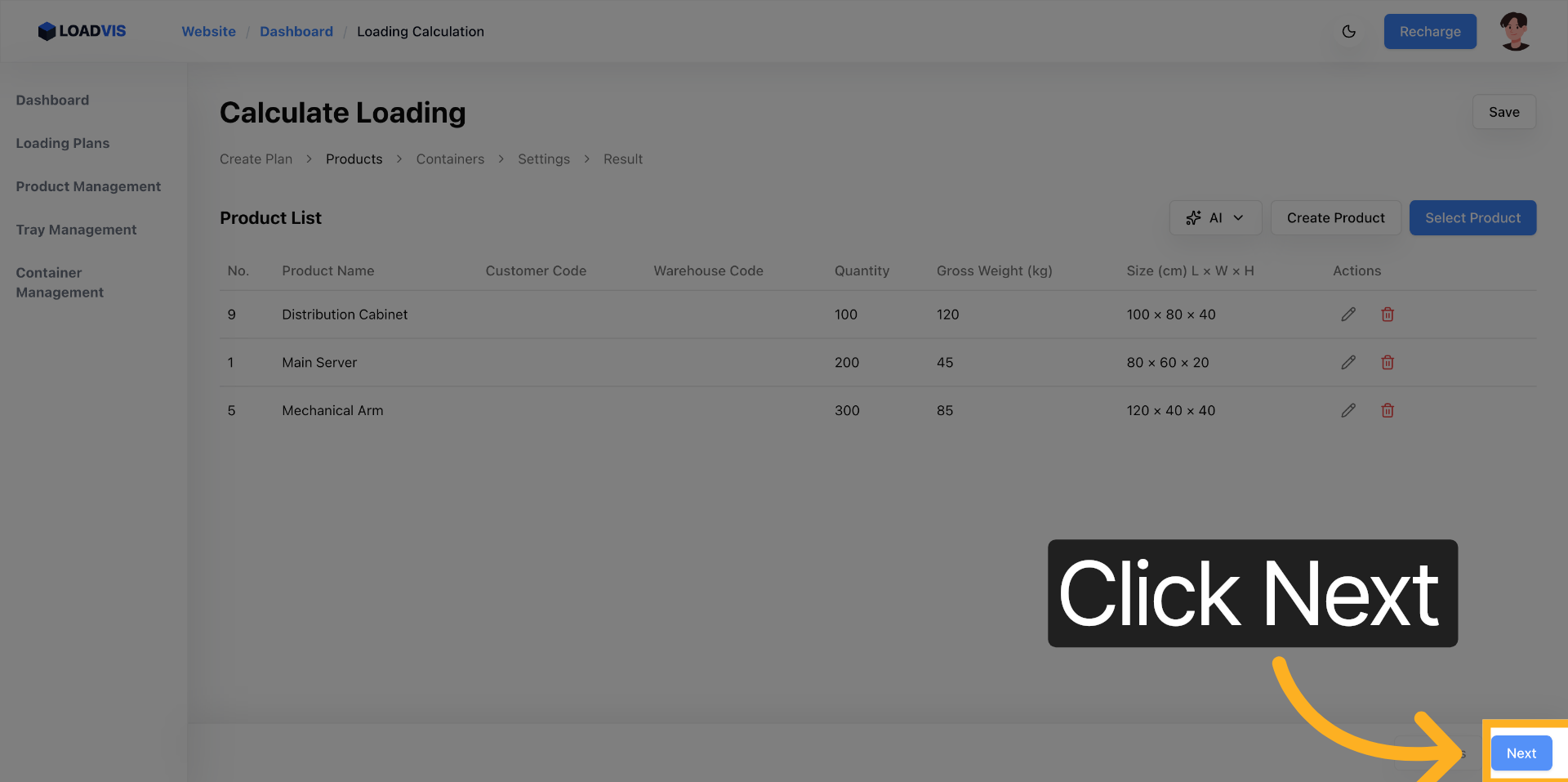
3番目も同様の手順で300を設定。
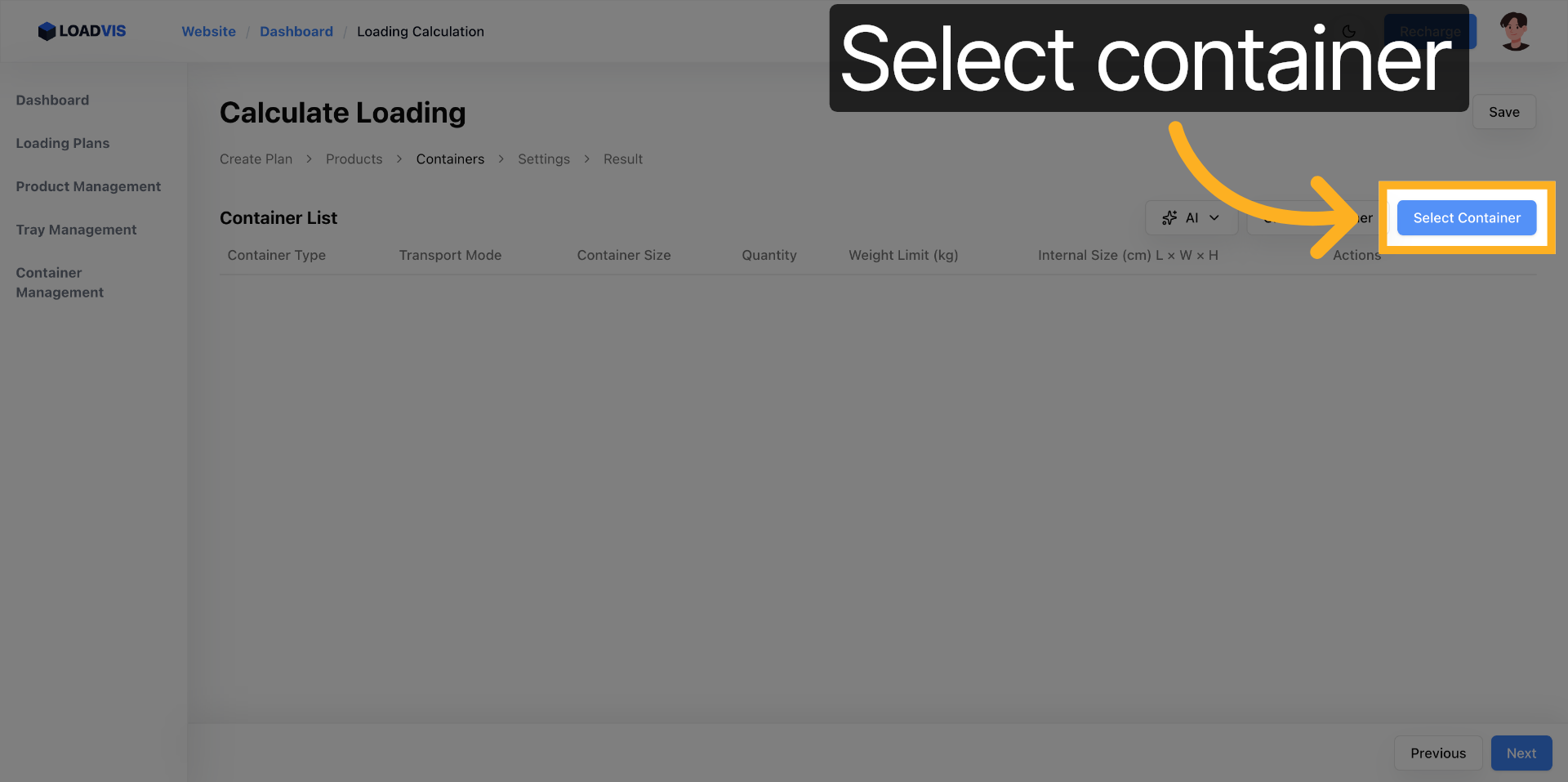
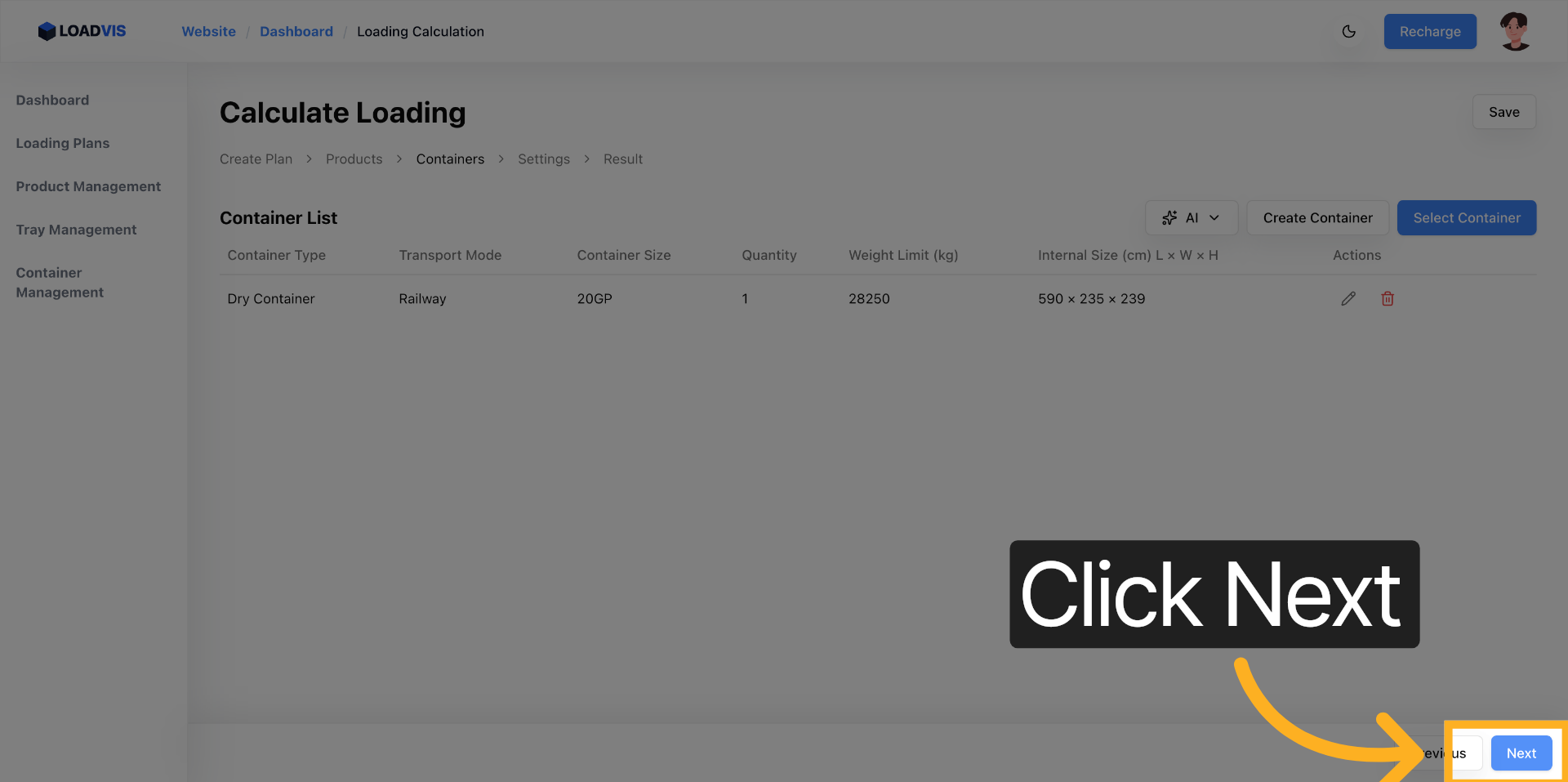
入力完了後、「次へ」でコンテナ紐付けへ。
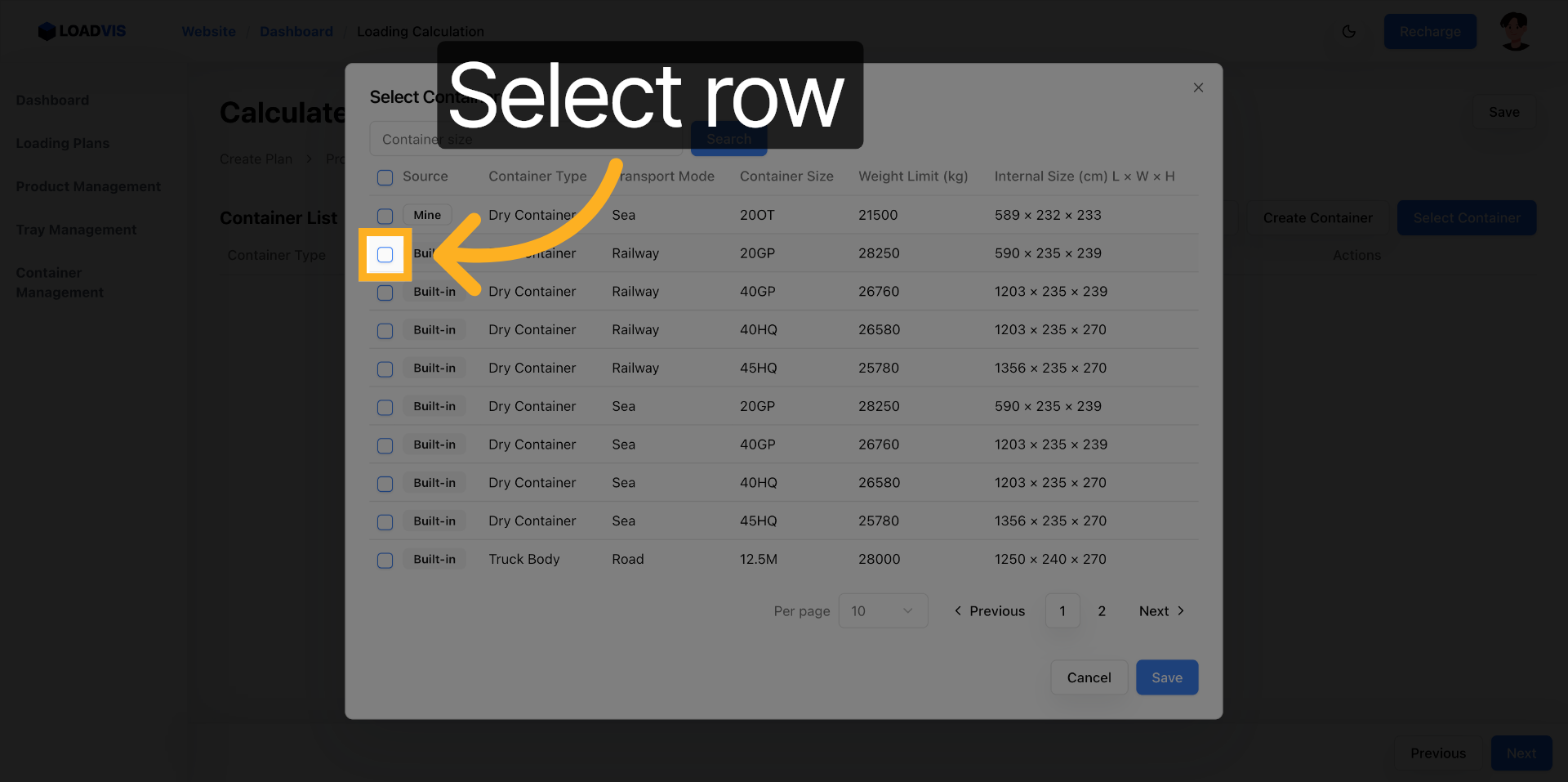
コンテナライブラリから物理規格に合致するタイプを選択。
  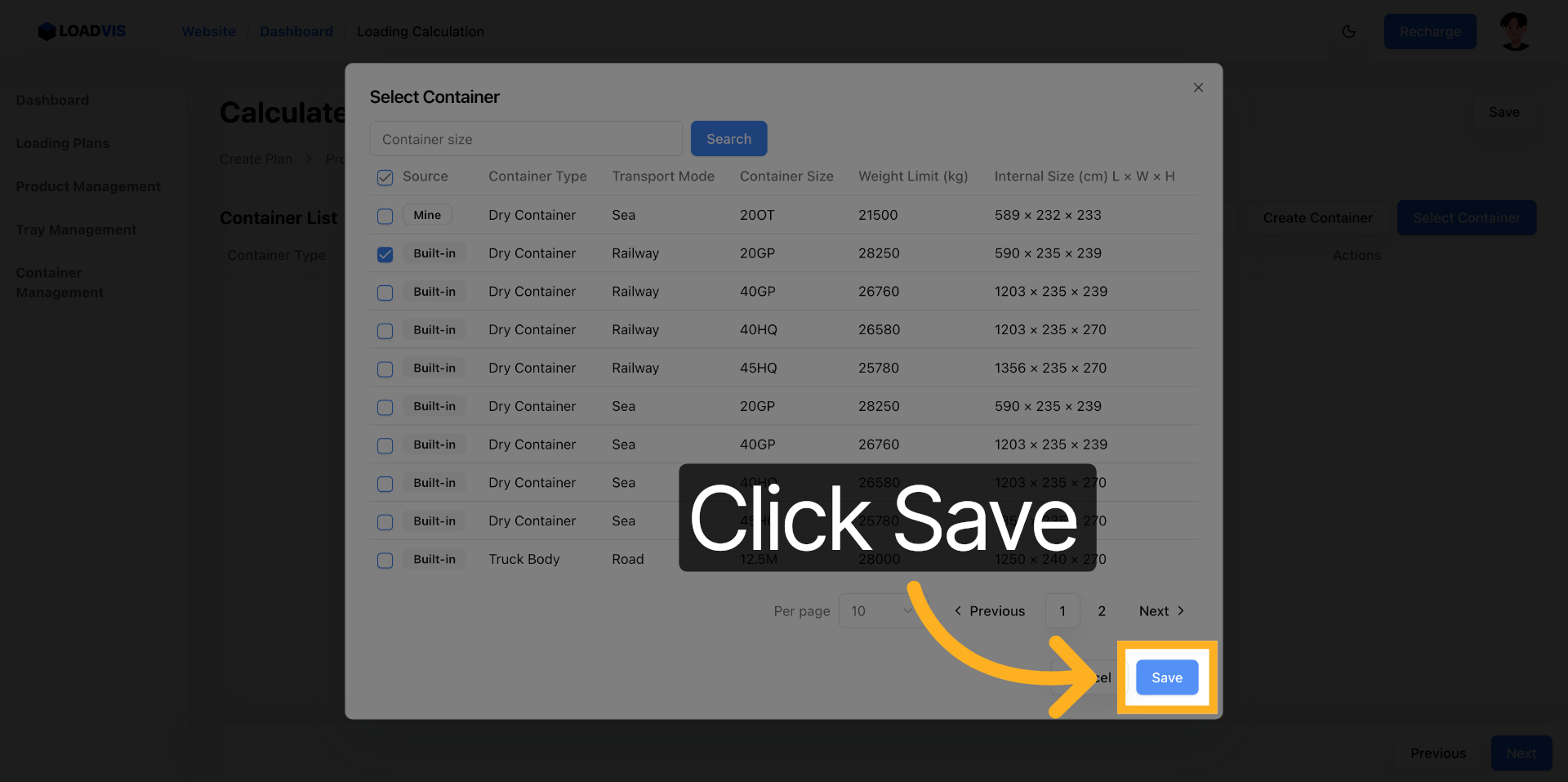
最終確認を経て、
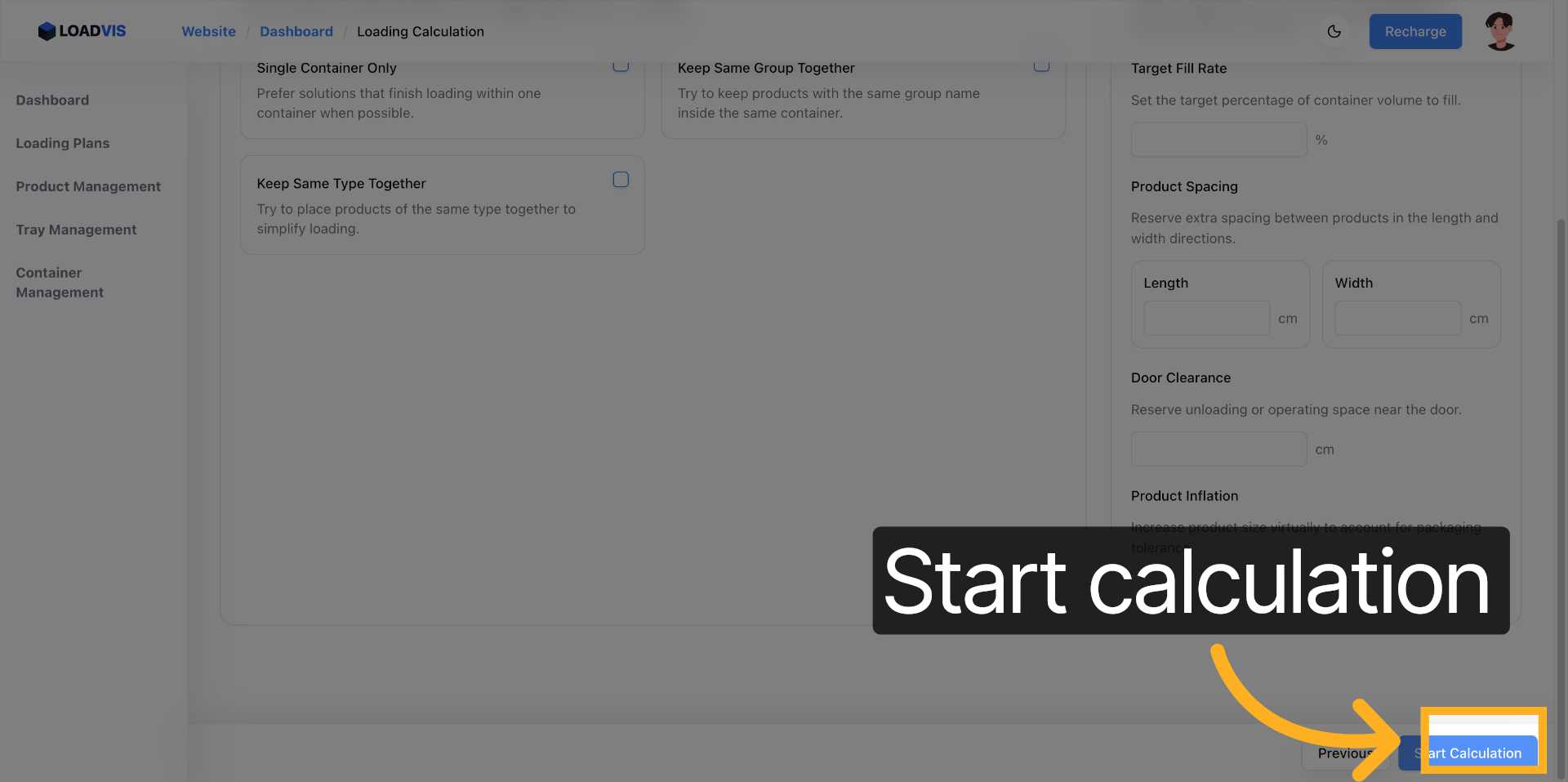
「計算開始」で最適化ルーチンを起動。
完了通知を確認し詳細ビューへ移行。

<iframe width="560" height="315" src="https://www.youtube.com/embed/H0Tvt8UyGhk" title="Loadvis Workflow" frameborder="0" allowfullscreen></iframe>
結果検証:間違ったアプローチ vs 確実なアプローチ
誤った方法は、体積率だけを見て「承認」を押すことだ。確実な方法は、多視点での干渉チェックと未積載要因の追跡に徹する。
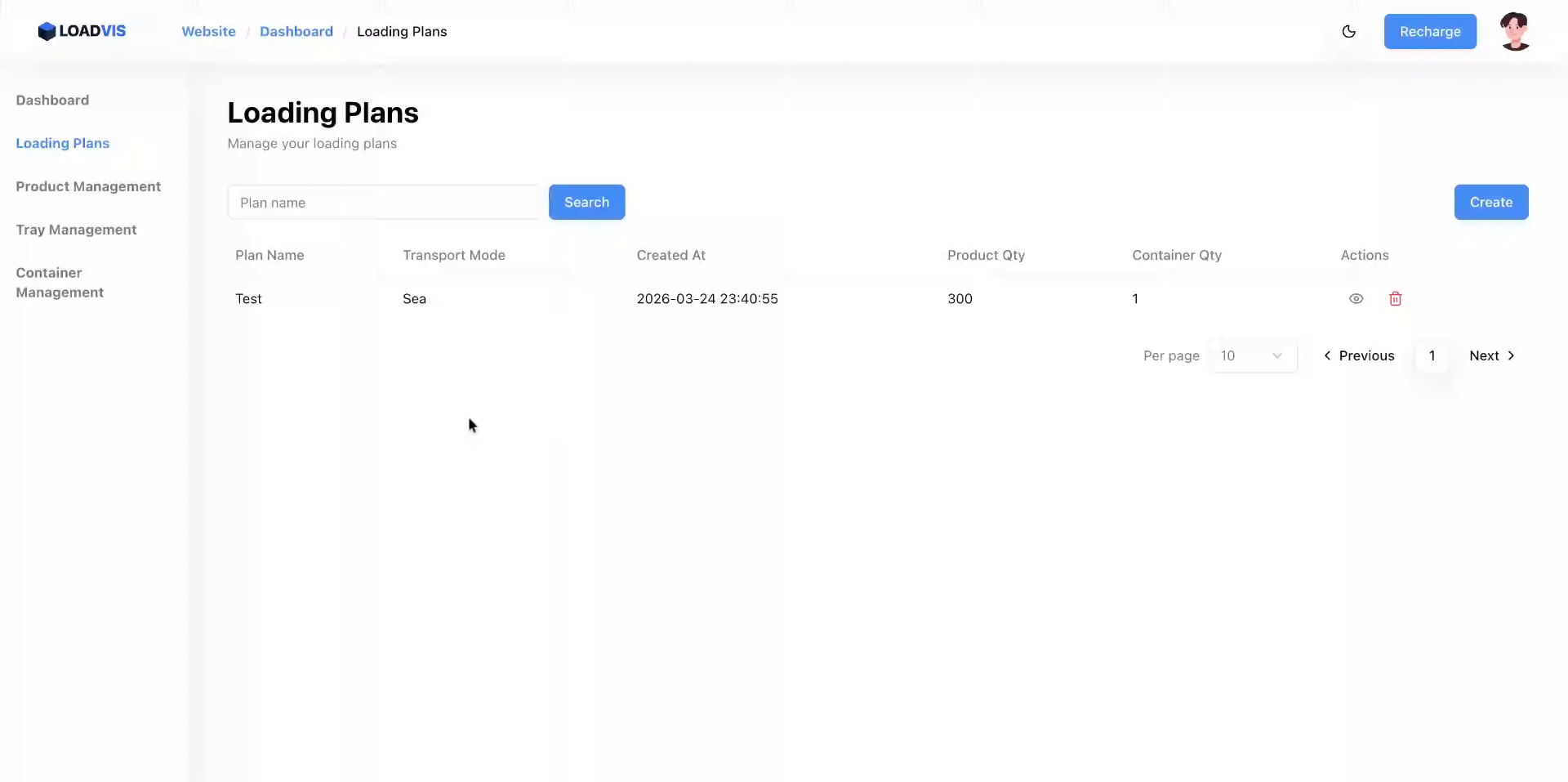
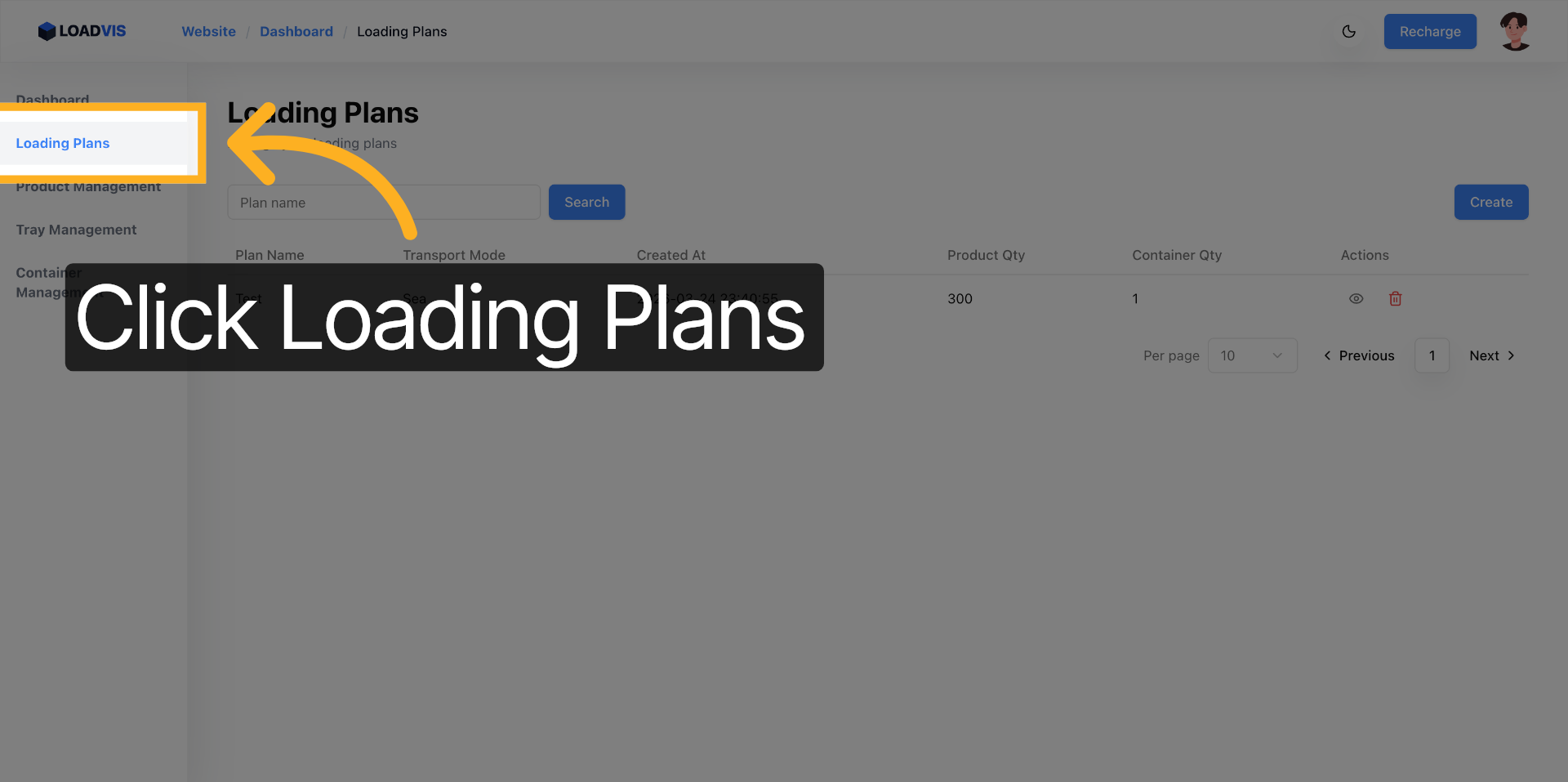
管理リストから計画を特定。
「積載計画」エリアを開き、
「詳細」をクリック。
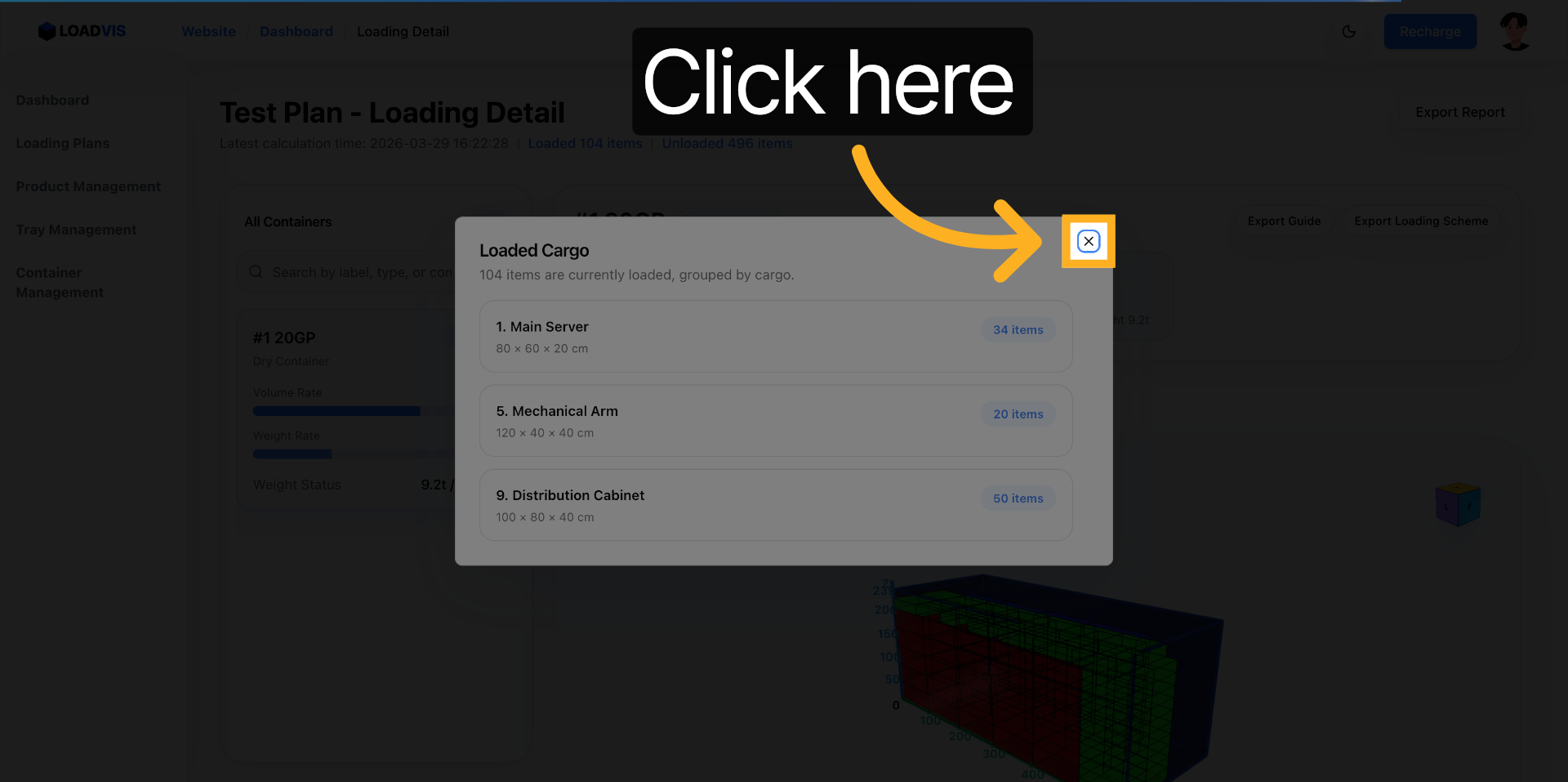
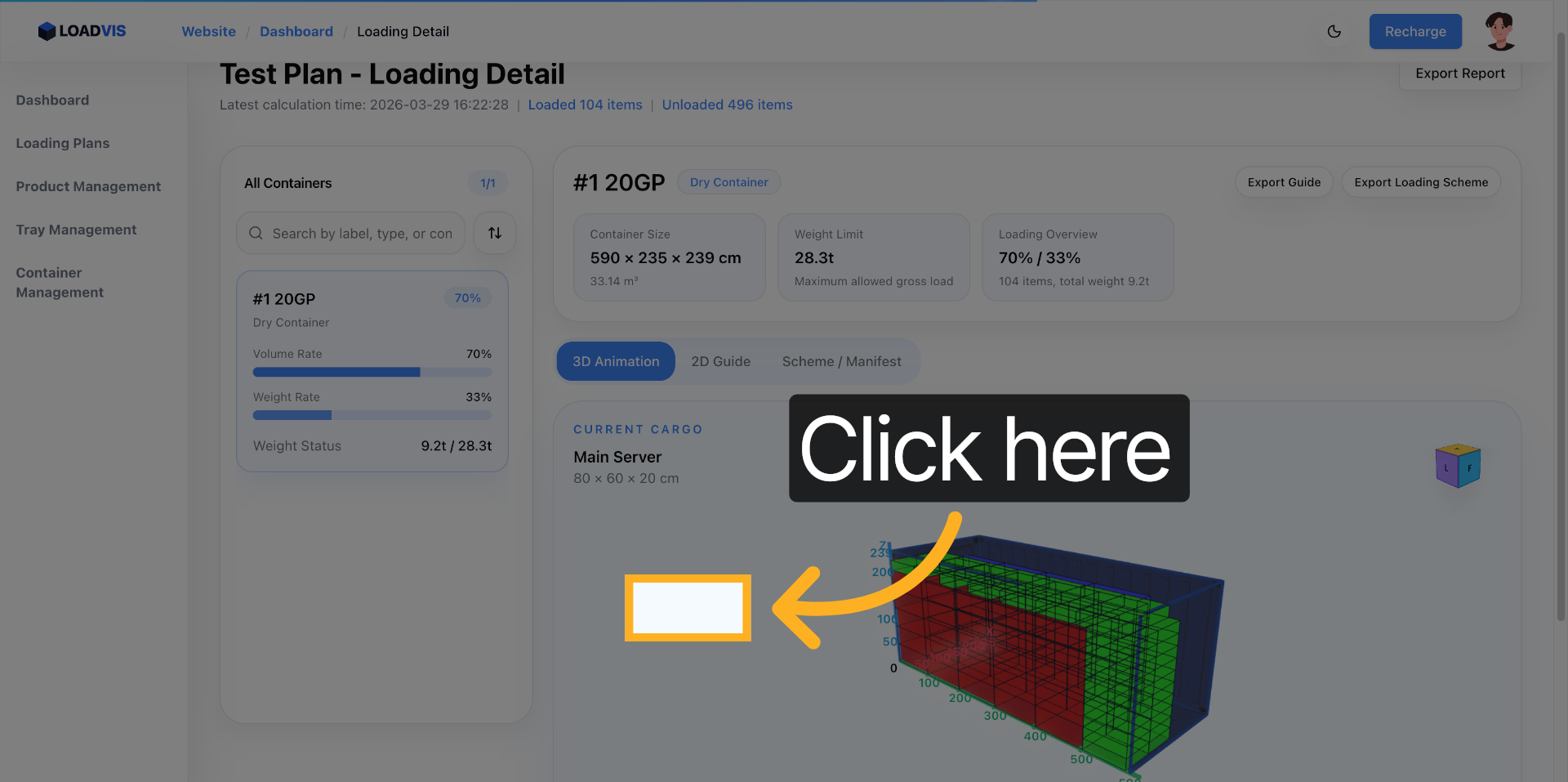
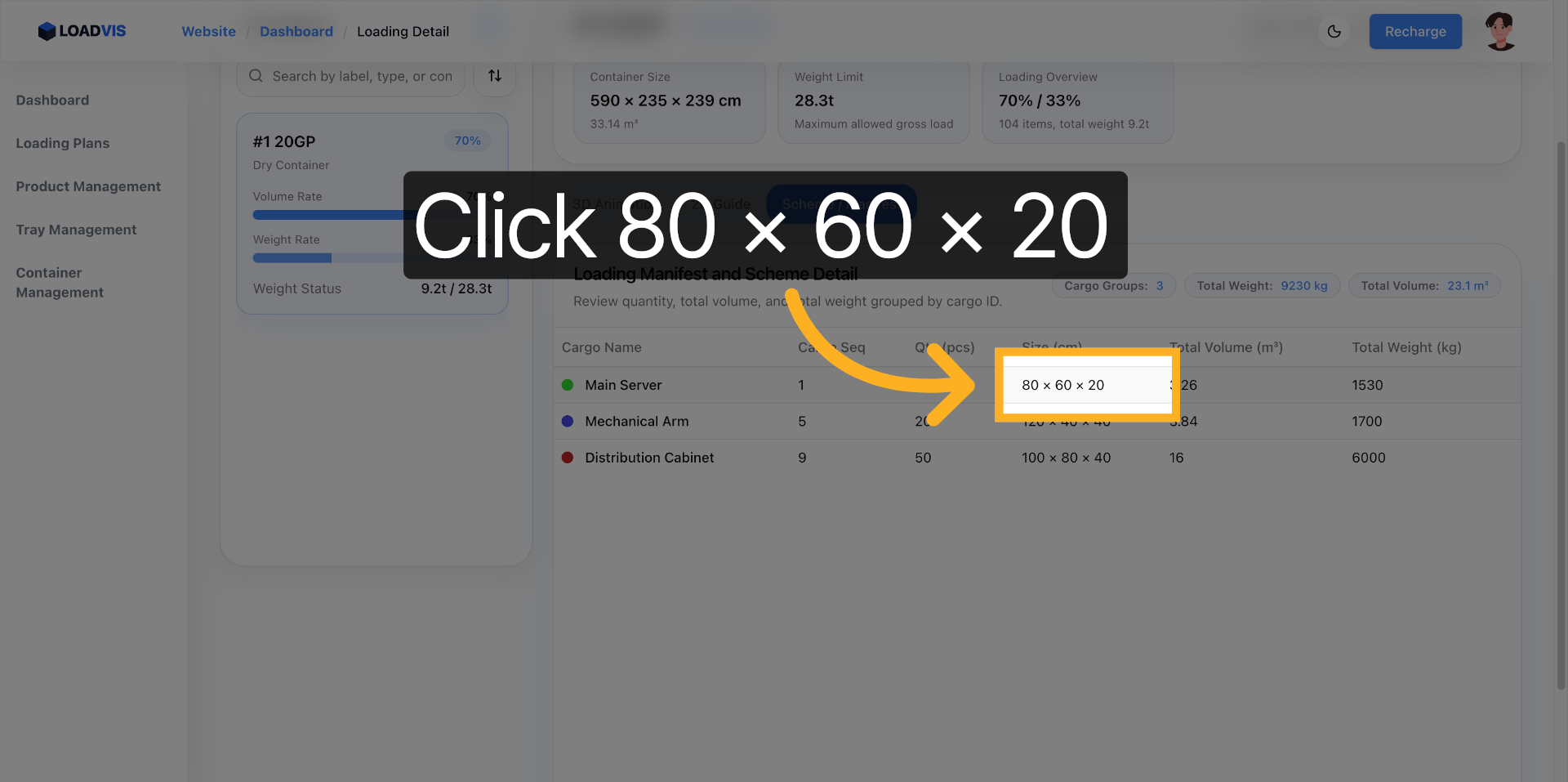
積載済み貨物マニフェストを展開し、明細の寸法/重量と実物が一致するか目視照合。
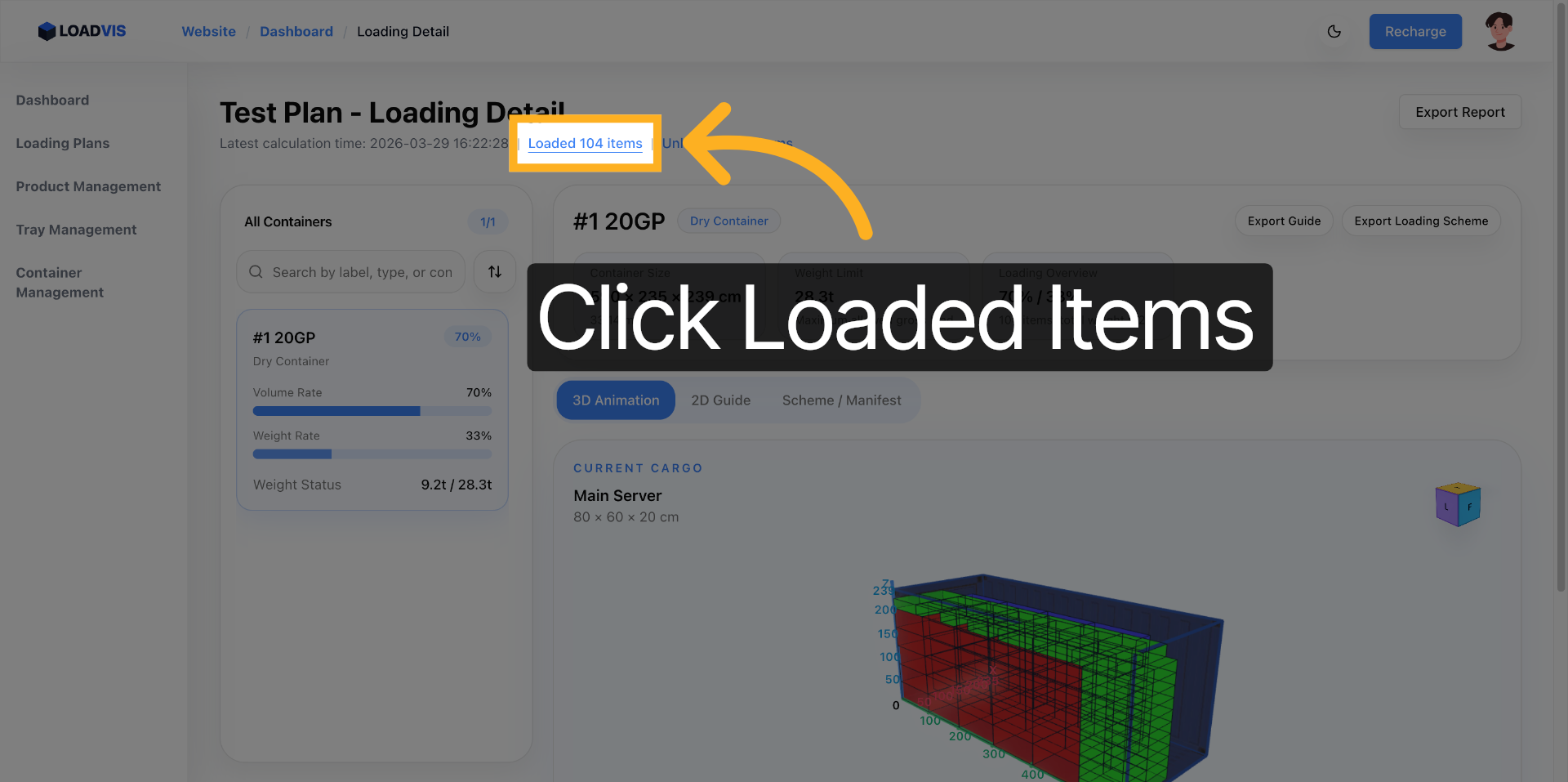 
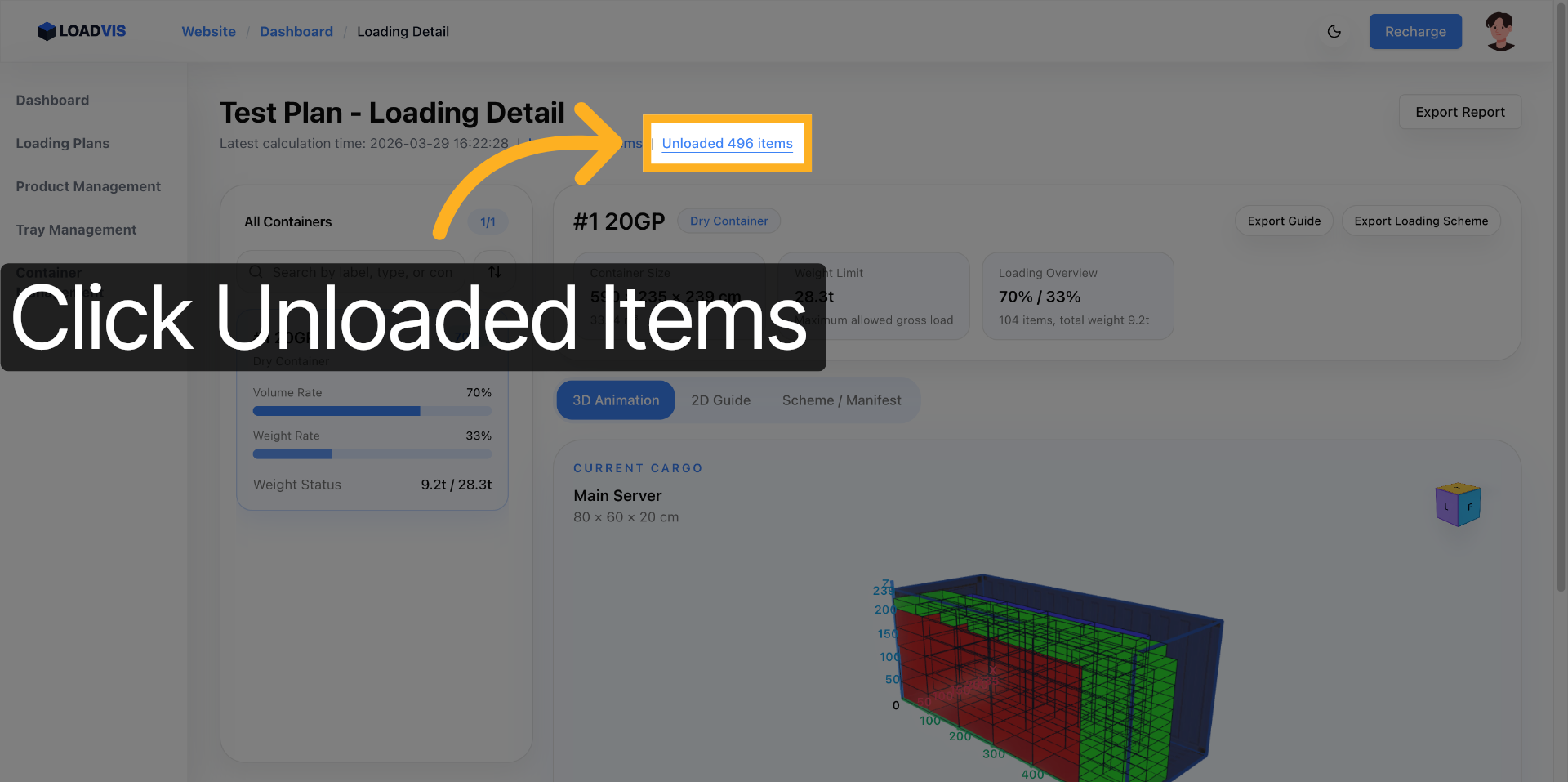
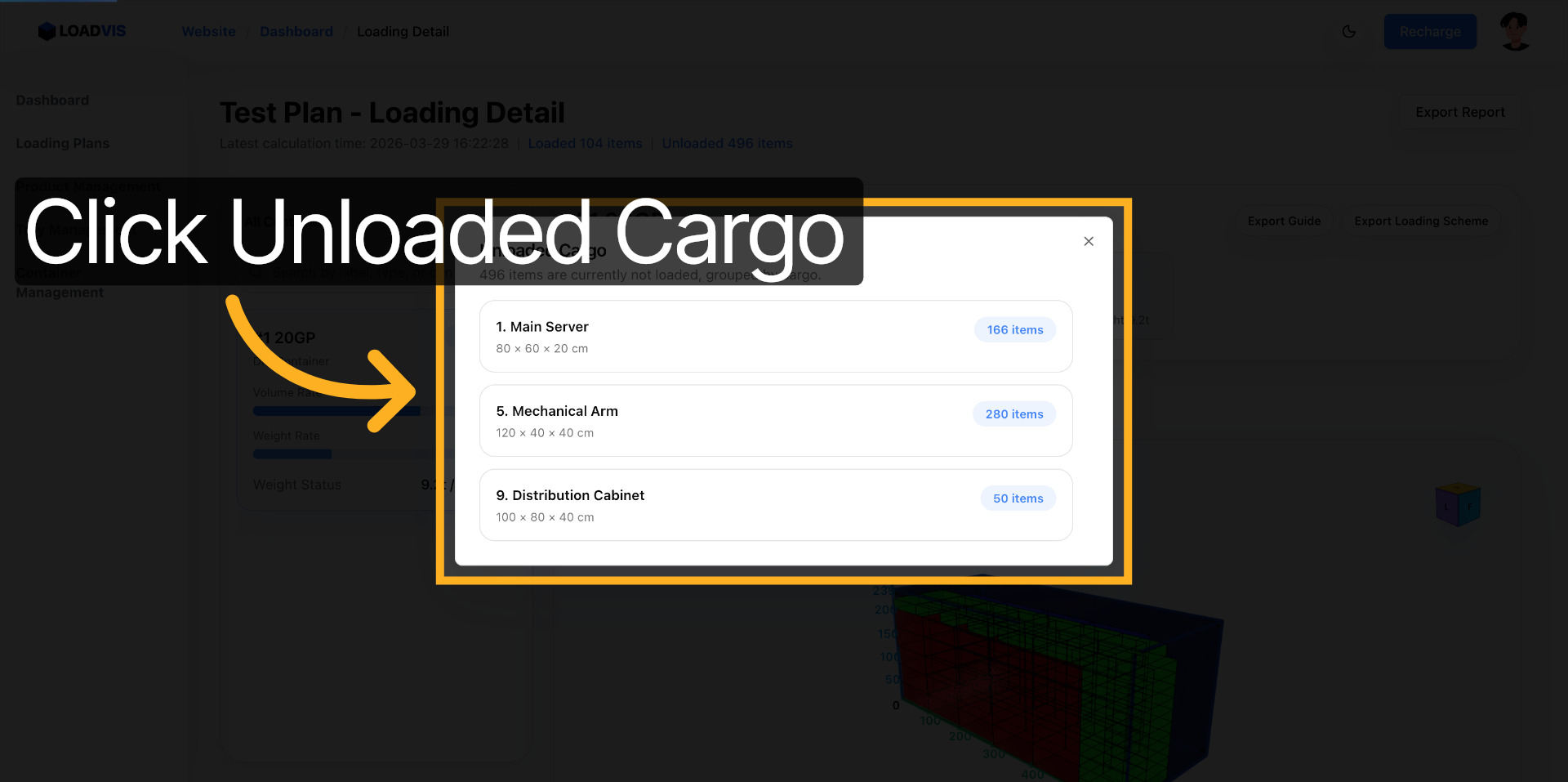
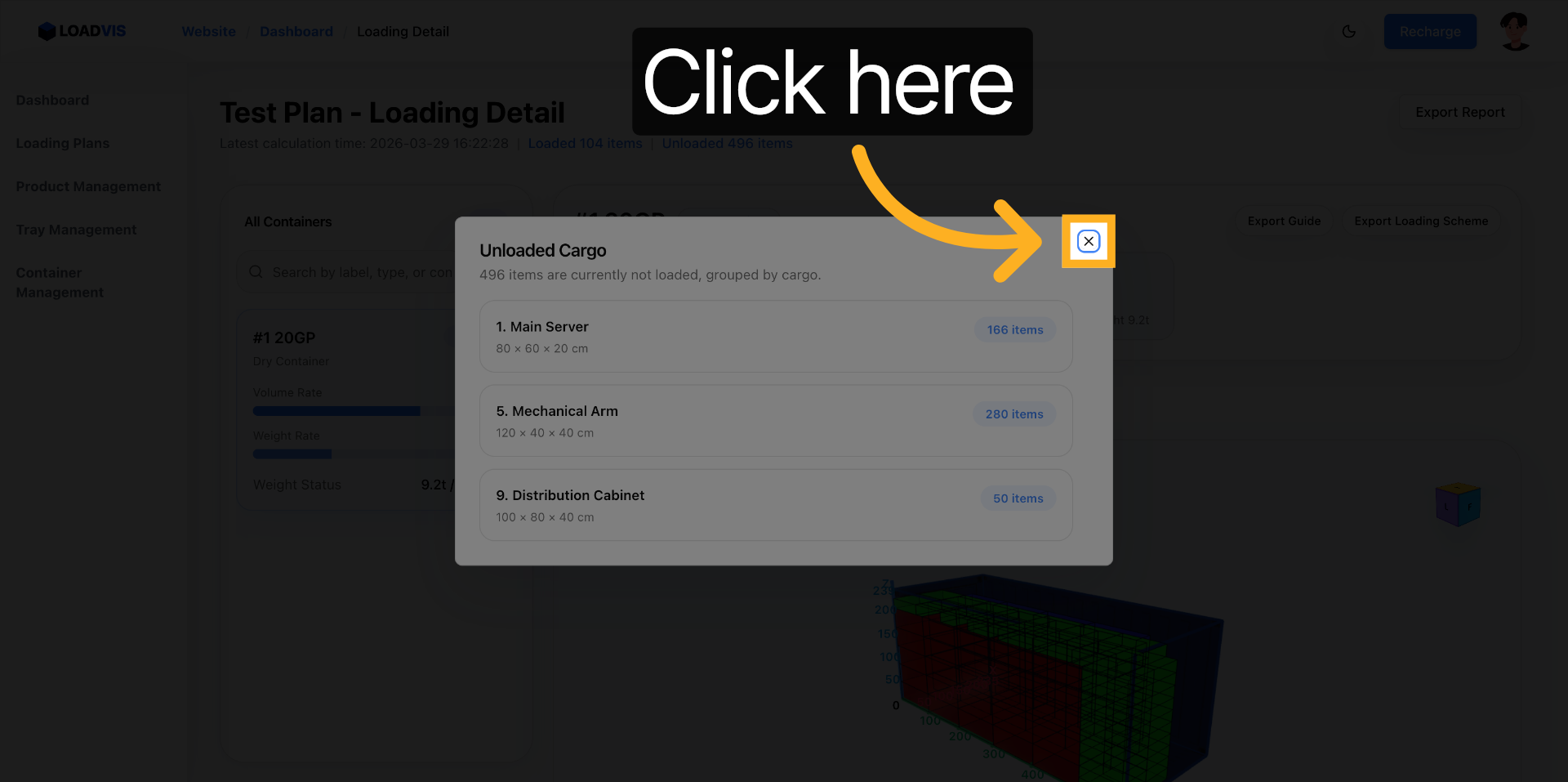
未積載496件の要因(重量オーバーか寸法干渉か)をグループ別に表示。
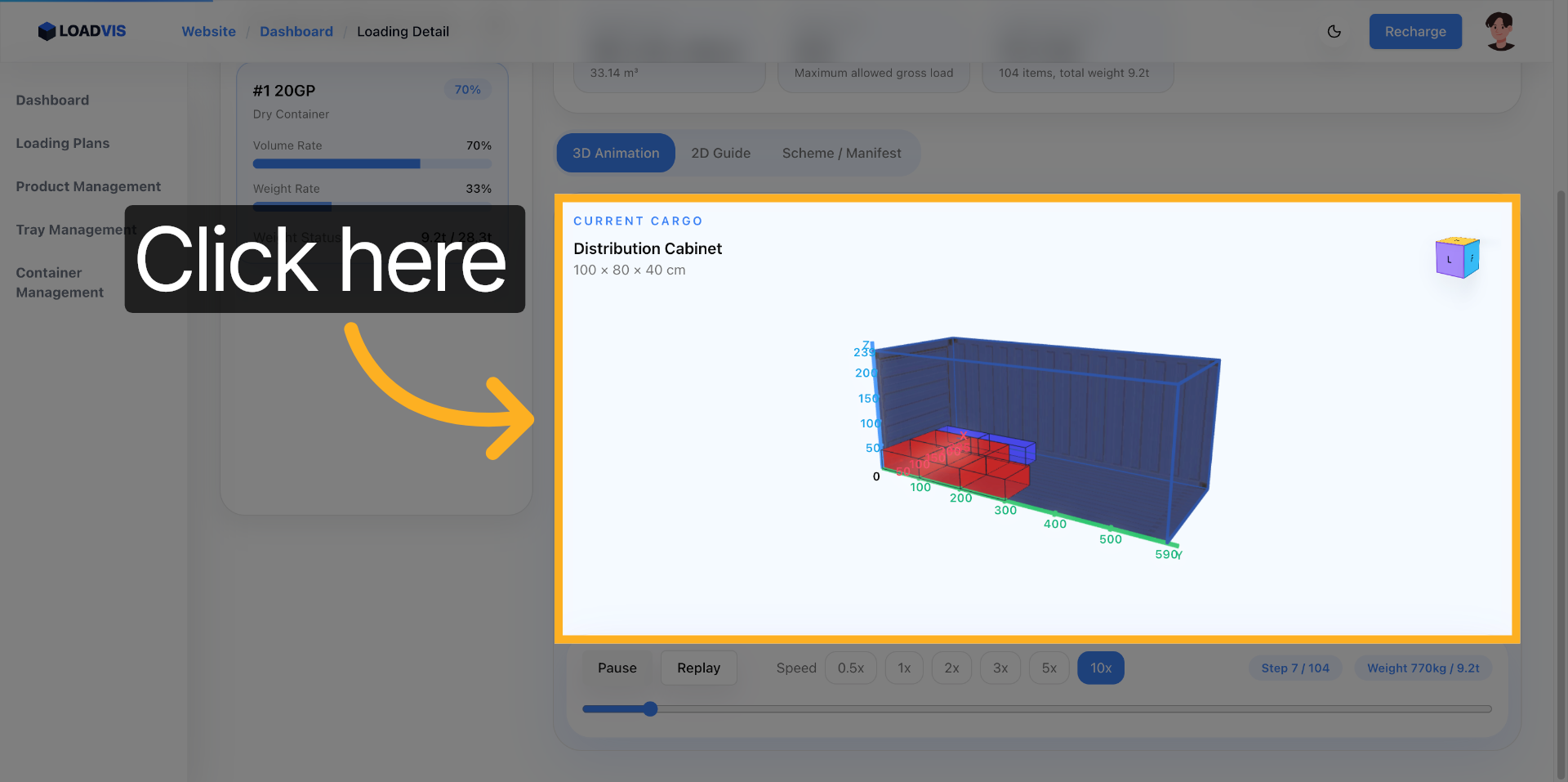
3Dビューで空間配置を回転させ、局所的な圧迫箇所を探す。
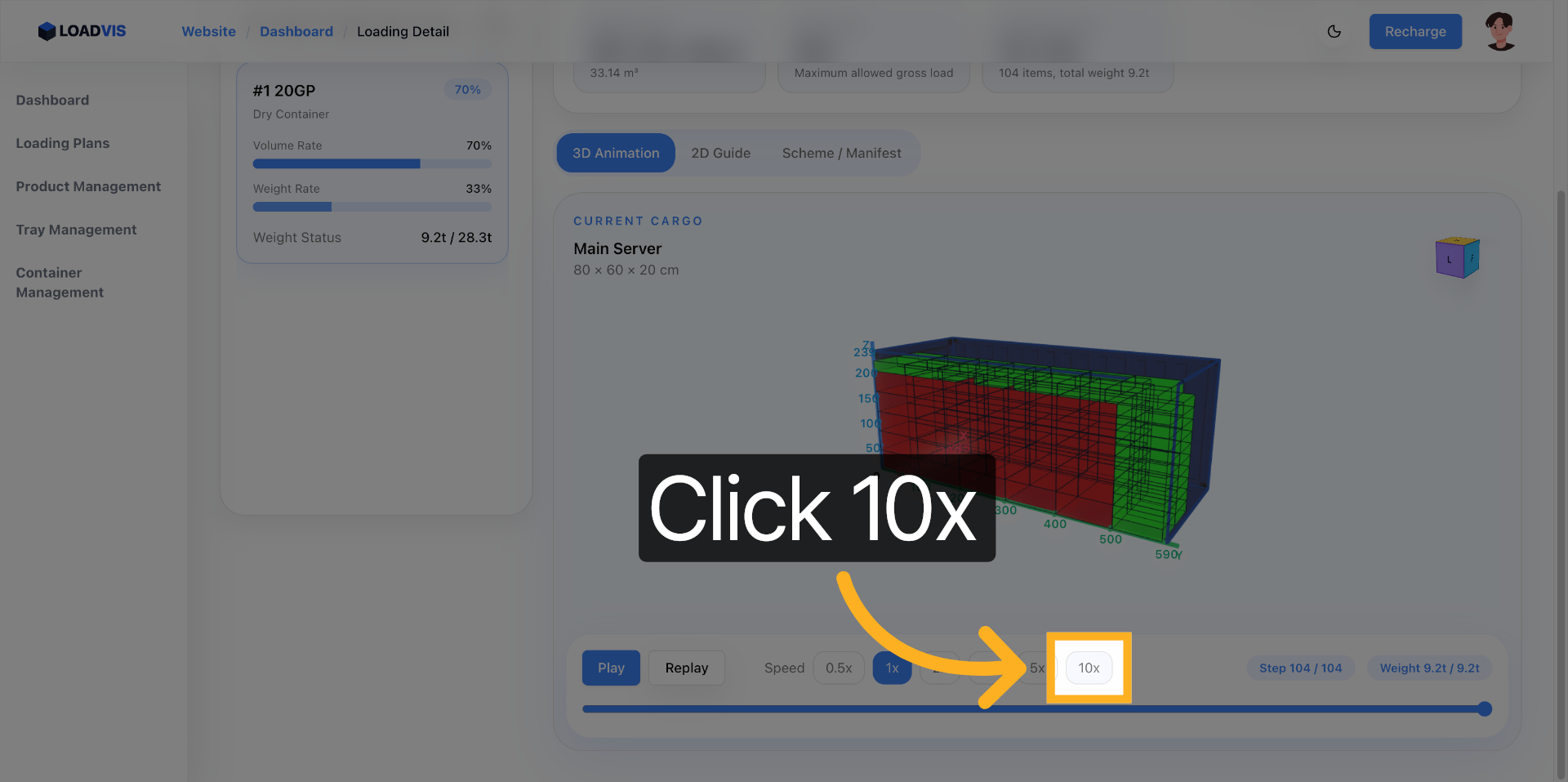
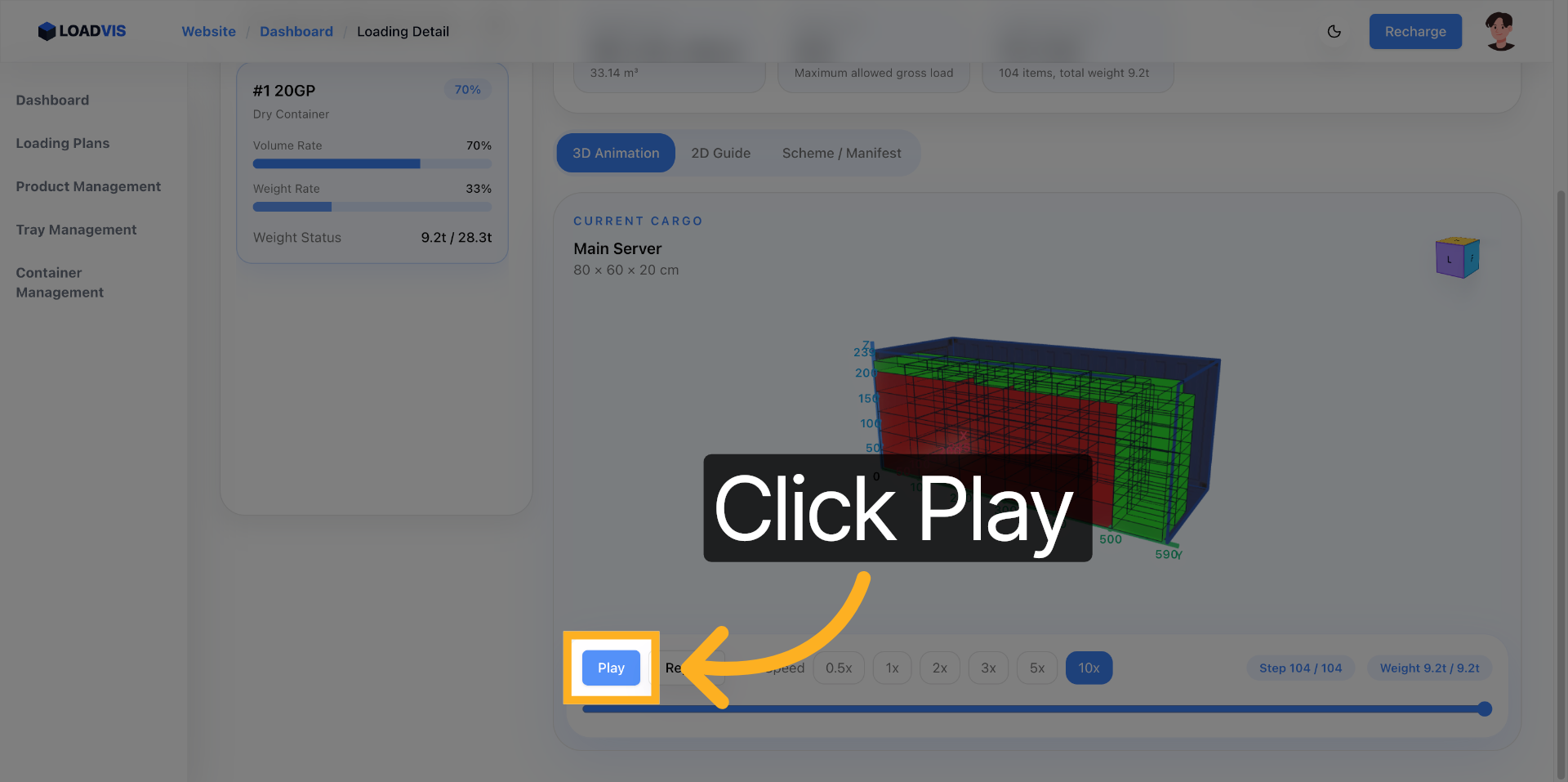
積載順序を10倍速でプレビューし、物理的に不可能な積み付けステップ(空中配置や無理な押し込み)を検出。
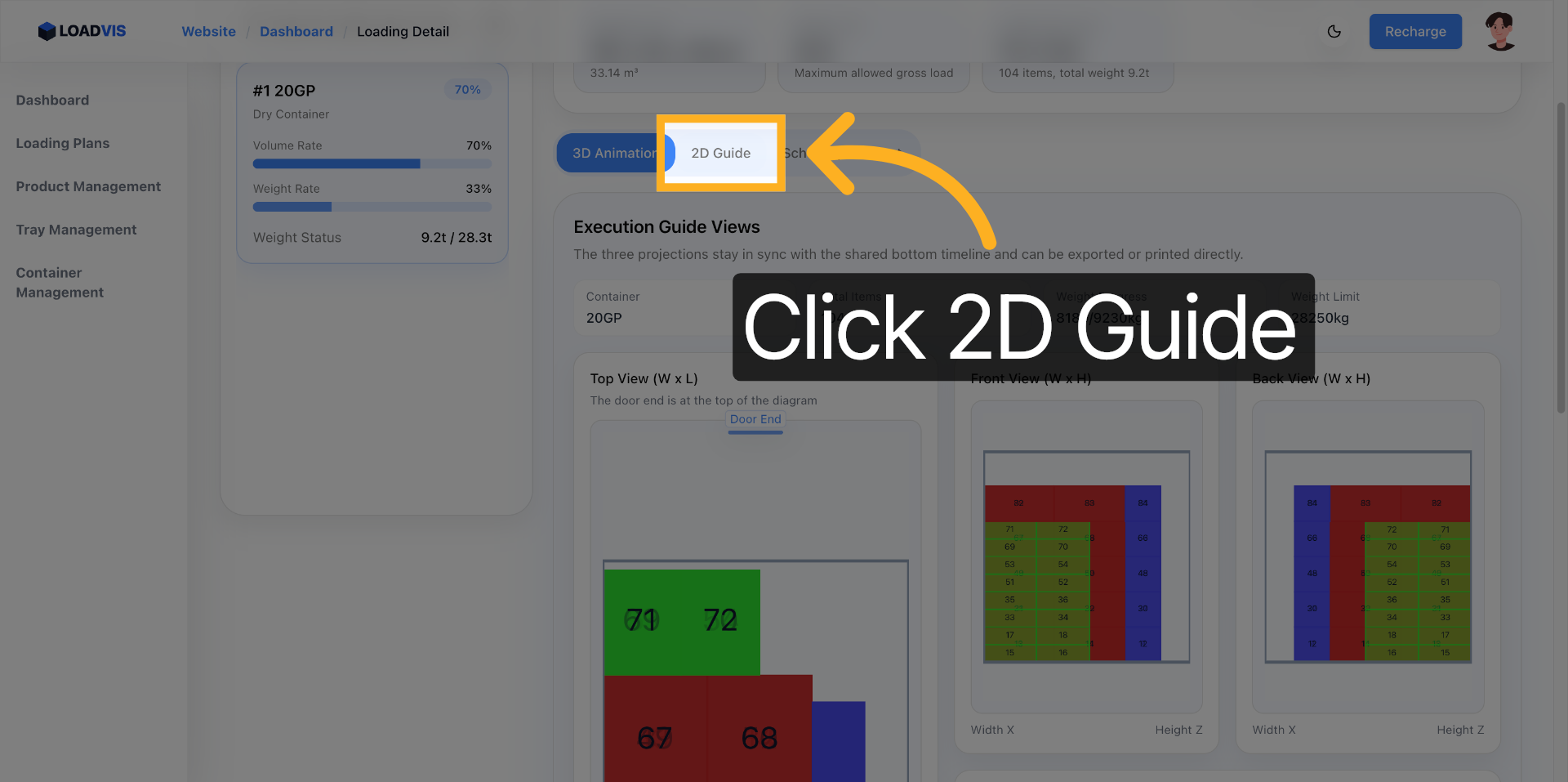
「2Dガイド」へ切り替え。トップビューでフォークリフト進入経路を確保し、サイドビューで扉開口クリアランスを検証。
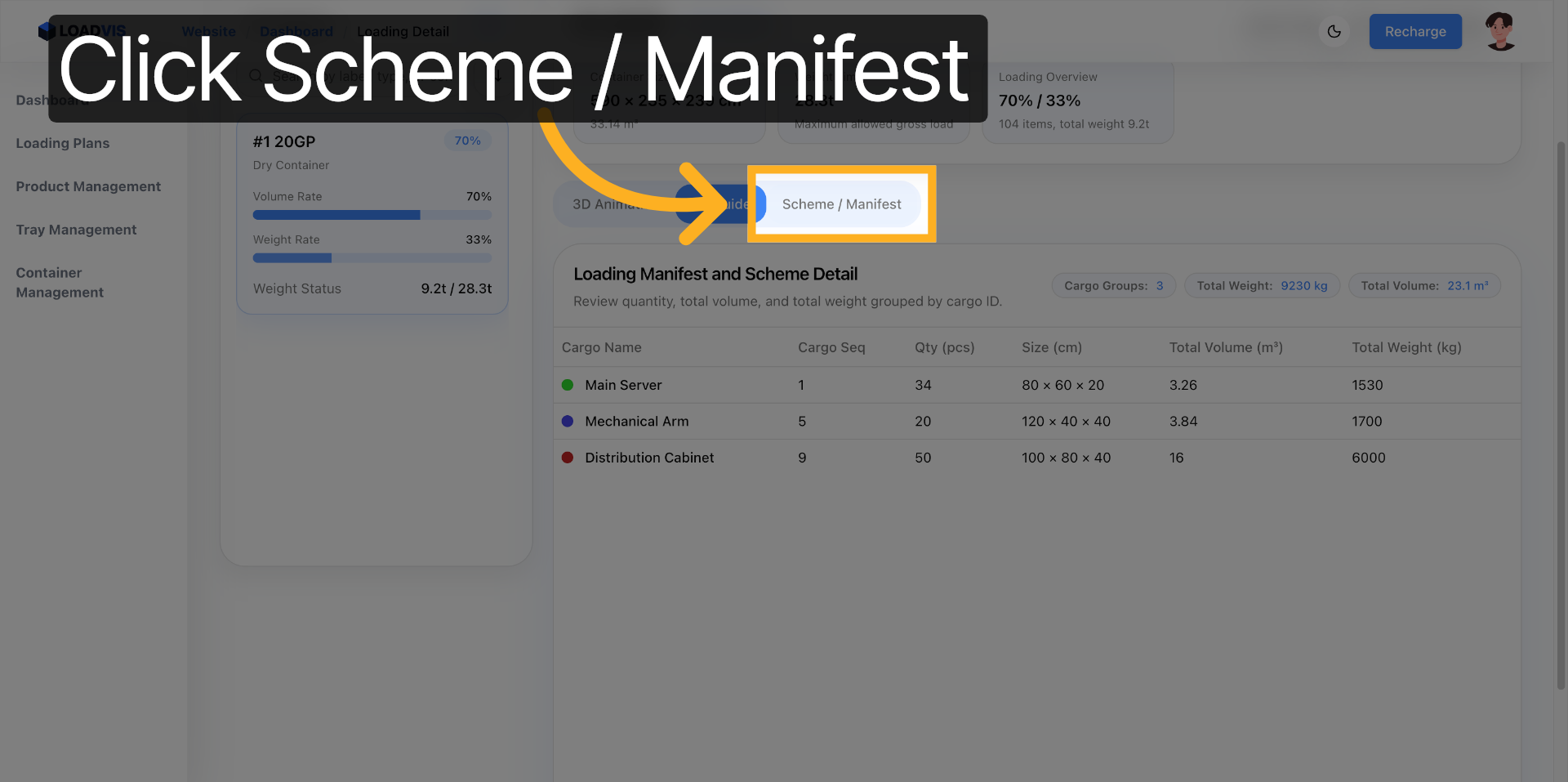
「スキーム/マニフェスト」から貨物寸法リストを最終確認。
<iframe width="560" height="315" src="https://www.youtube.com/embed/R2w9Uyqu-bY" title="Detail Verification" frameborder="0" allowfullscreen></iframe>
計画検索は、キーワードとフィルターの組み合わせで過去の失敗ケースを迅速に呼び出す手段になる。
リストを開き、
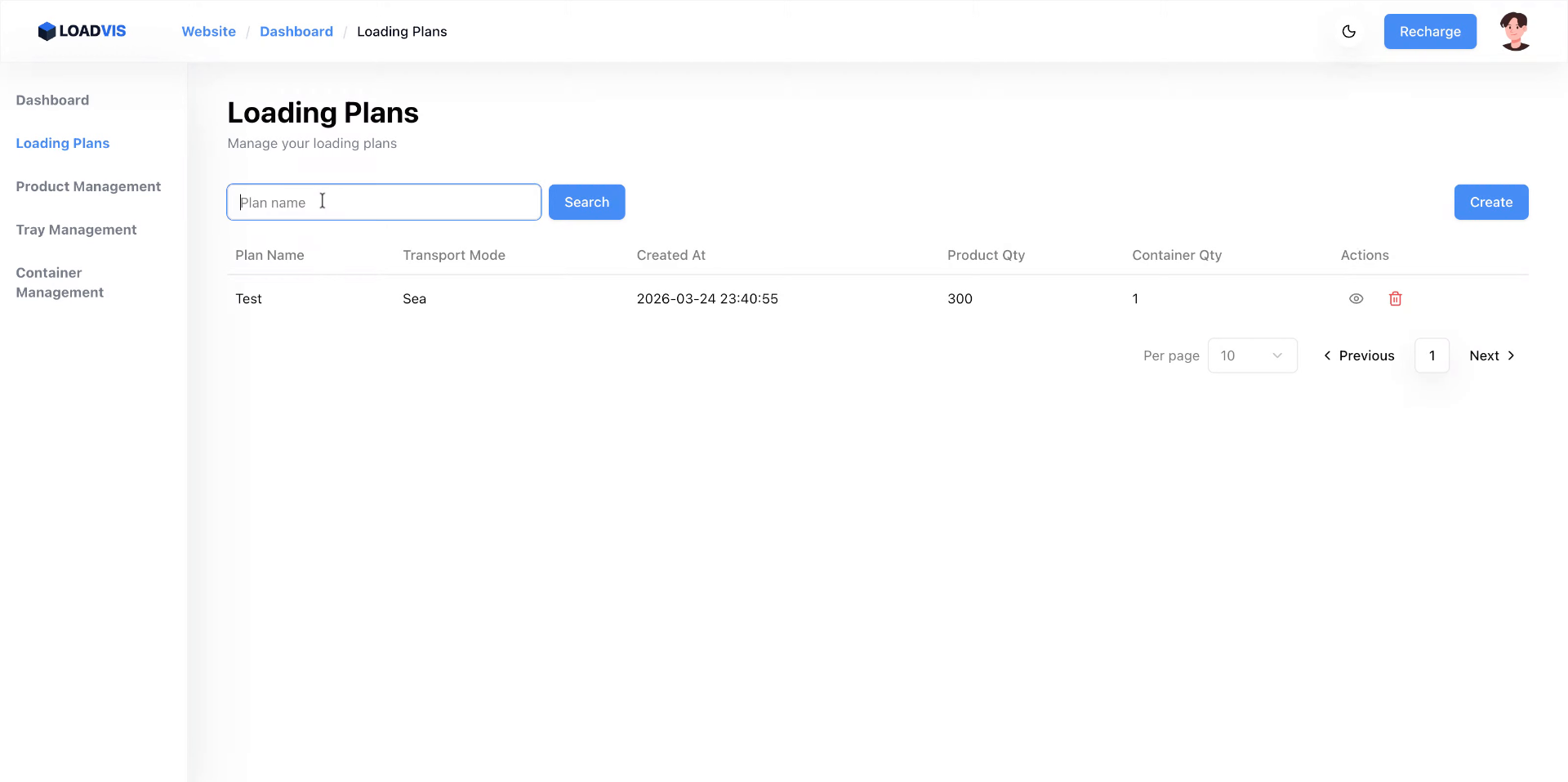
「計画名」フィルターを展開、
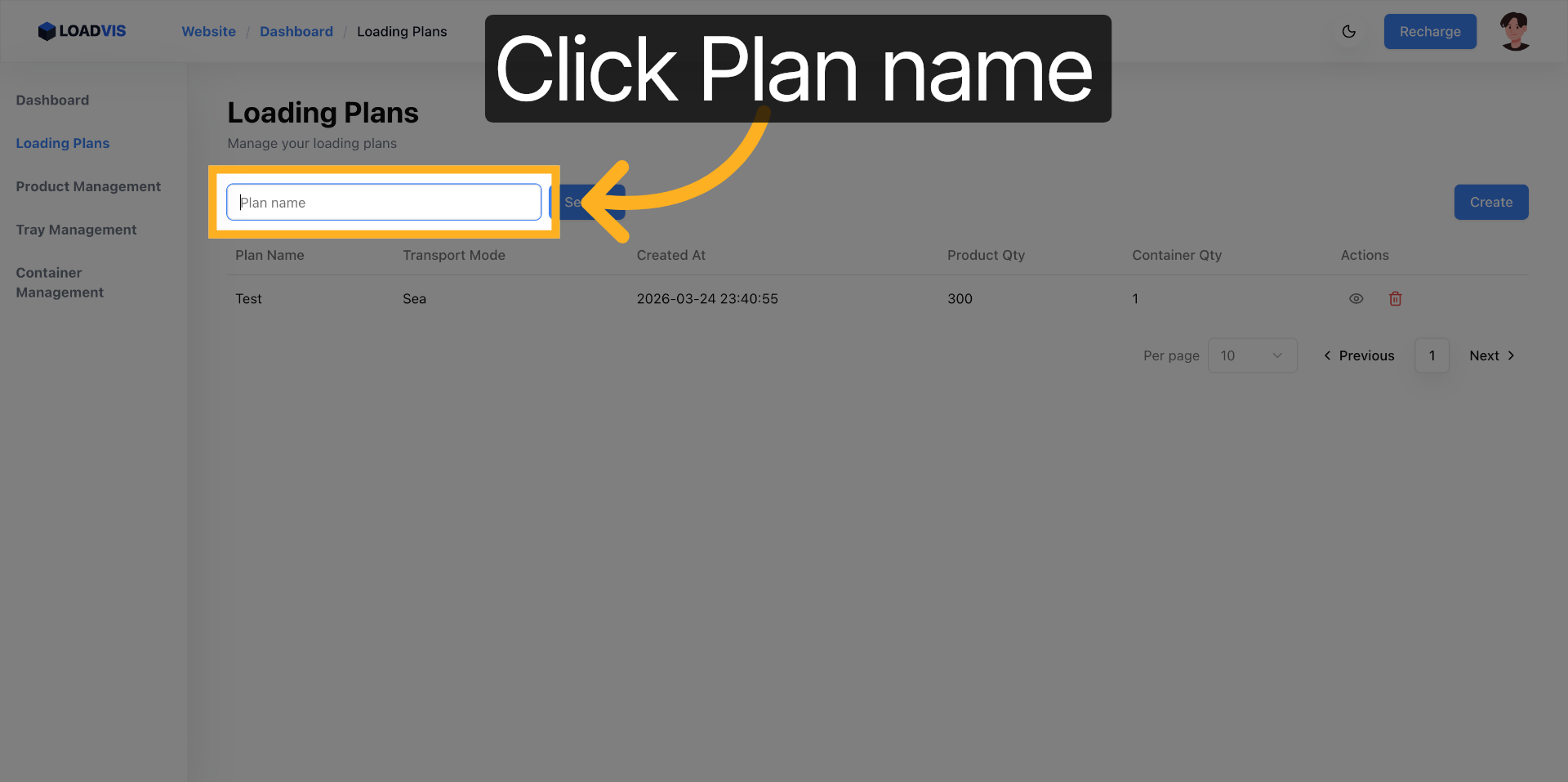
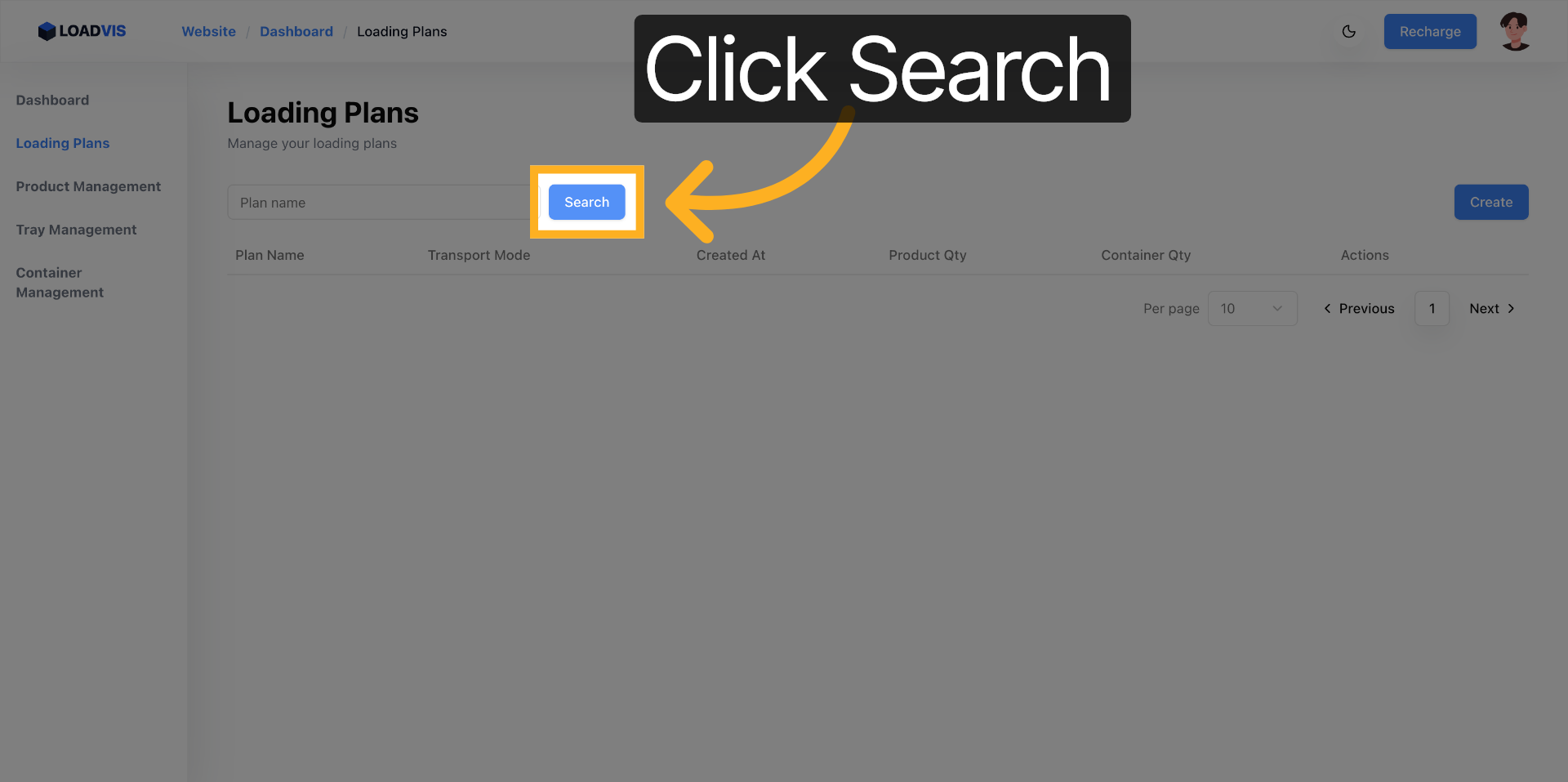
キーワード「tester」を入力して実行。
<iframe width="560" height="315" src="https://www.youtube.com/embed/odDRxH_UbYM" title="List Filter" frameborder="0" allowfullscreen></iframe>
初期保存フローも同様に記録として残すことで、変更履歴のトレーサビリティが確保される。
<iframe width="560" height="315" src="https://www.youtube.com/embed/YyqWqZ5PLzU" title="Create Plan" frameborder="0" allowfullscreen></iframe>
4. ツールの支援範囲と手動確認必須領域の境界
アルゴリズムと人間の責任領域を混同してはいけない。システムが支援するのは、理論的なパッキング最適化、数値上の体積率計算、重心偏差の理論値導出、および積載順アニメーションの提示までだ。それはあくまで「座標空間上の解」である。
現場で手動確認が必要な領域は、ツールがアクセスできない物理的制約と作業慣習に集中する。
- フォークリフト作業スペースの確保: 計算機は隙間を埋める。人間は「フォークが刺さるか」を判断する。平面図上で前後左右に最低500mm~600mmのバッファーゾーンが確保されているか、必ず目視検証する。
- 実際のパレット変形率・段ズレ: 理論寸法と実寸法には公差がある。段積みが3段を超える場合、底部のたわみによって上部のパレットが数センチ傾く。計画上は垂直でも、現場では斜めになり、重量が点に集中する。
- 建屋入り口の高さ制限と扉開閉クリアランス: コンテナ扉高さから150mmのマージンを差し引いた値を絶対上限とする。荷役ゲートの雨よけや、コンテナ自体のサスペンション沈下を考慮しない計画は、現実では通過しない。
- コンテナドア開閉時のクリアランス: 積載が扉面まで到達する場合、ドアを180度開いた際に貨物が干渉しないか。サイドビューで最終確認する。
- 現場荷役ルールとの整合性: 「重い物は下」「液体は上」「粉物は分離」などのローカルルールは、最適化アルゴリズムの優先度パラメータとして明示的に設定されない限り無視される。マニフェストの出力順序が現場の積み込み順序と矛盾していないか、論理整合性を手で引く。
許容重心偏差は±5%以内を閾値とする。これを超えた場合、重量分散マニフェストを確認し、重貨物を前後軸・左右軸で再配分する。体積率が92%でも重心偏差が7%なら、計画は即座に却下されるべきだ。
5. 計画確定前の検証基準と意思決定フレームワーク
計画承認の可否は、直感ではなく検証基準の通過率で決定される。実行前に以下のチェックリストを通過する。
- 入口クリアランス検証: 最大貨物高さ ≤ (扉高さ - 150mm) であるか。
- 重量分散閾値: 前後軸・左右軸の重心ズレが±5%の許容範囲内か。床面荷重がコンテナ仕様値を下回っているか。
- 2Dトップビュー干渉確認: フォークリフト進入経路に最小500mmの作業スペースが残っているか。
- 2Dサイドビュー経路確認: 扉開閉時の物理的干渉がないか。積載順序が実際の荷役フローと矛盾していないか。
- 明細の現実検証: 入力寸法が実物梱包寸法と一致しているか。未積載貨物の理由がスペース不足なのか重量制限なのかを区別し、代替計画を立てられるか。
体積達成は必要条件であって、十分条件ではない。アルゴリズムが示すのは「詰め込める限界」であり、「安全に運用できる最適解」ではない。計画立案者は、数値の背後にある質量、摩擦、人間の動作余白を常に監視しなければならない。検証フローを標準化し、ツールと手作業の境界を明確に引くこと。それが、現場で機能する積載計画の唯一の担保である。