Écart entre optimisation volumétrique et faisabilité terrain : revue de scénario
Le moteur de calcul crache un plan à 92 % de saturation volumétrique. Sur le quai, rien ne bouge. Les palettes butent contre le linteau. La séquence d'extraction prévue par l'optimiseur entre en collision directe avec les cinématiques du chariot élévateur. Pire : le centre de gravité se décale latéralement dès l'ouverture des vantaux. Le conteneur bascule. Ce n'est pas un bug. C'est un symptôme classique de modélisation abstraite décorrélée des contraintes cinématiques réelles. L'algorithme maximise des polyèdres. Le terrain gère des frottements, des portes, des tolérances millimétriques et des masses mal réparties. Le décalage est immédiat. Il coûte du temps. Il génère des immobilisations non planifiées.
Pourquoi ce biais est fréquemment sous-estimé
Les tableaux de bord mentent. Ou plutôt, ils mentent par omission structurelle. Les indicateurs classiques se contentent d’agréger des ratios volume/poids globaux. Ils ignorent délibérément la friction physique. Pourquoi ? Parce que la modélisation par défaut privilégie la densité mathématique au détriment de la séquence opérationnelle. On oublie systématiquement que les cotes réelles ne correspondent jamais aux fiches théoriques. L’épaisseur du revêtement mural grignote cinq centimètres. Le mécanisme de fermeture des vantaux absorbe douze centimètres de hauteur utile. Les palettes en bois gonflent avec l’hygrométrie ambiante. Ces variables sont traitées comme du bruit statistique par les solveurs standards. Résultat : un fossé systématique entre le graphe de calcul et la physique du sol. La validation se fait sur écran. La réalité se joue au sol.
Opérations clés & workflow technique
Sortir des templates prédéfinis est obligatoire. Il faut recalibrer le référentiel matériel à la main. Ou laisser le moteur de reconnaissance extraire les paramètres d’une fiche technique brute. La mécanique d'implémentation s'articule autour de quelques points de friction critiques.
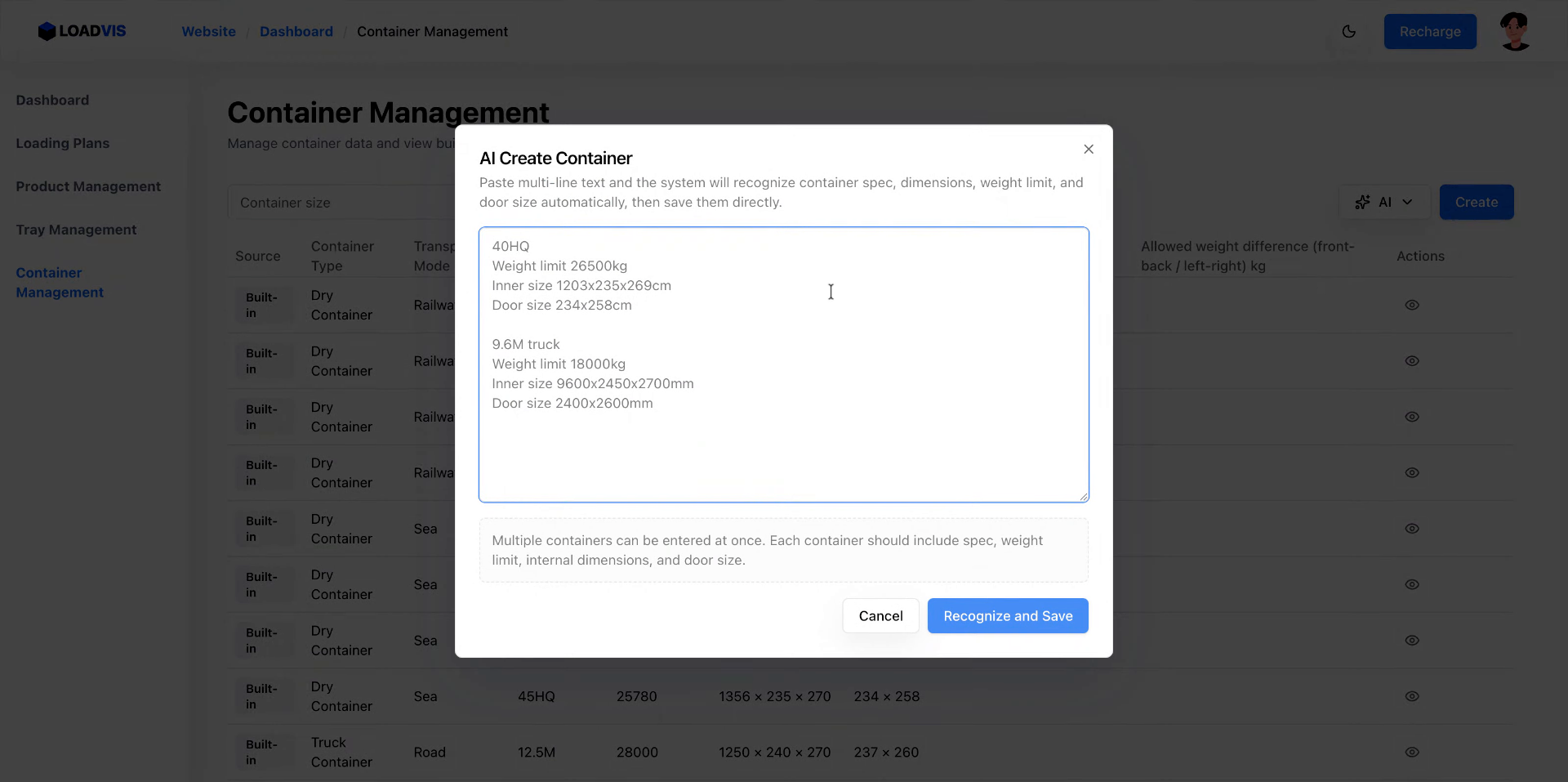
L’accès se fait par Gestion des conteneurs. On abandonne les profils génériques importés par défaut.

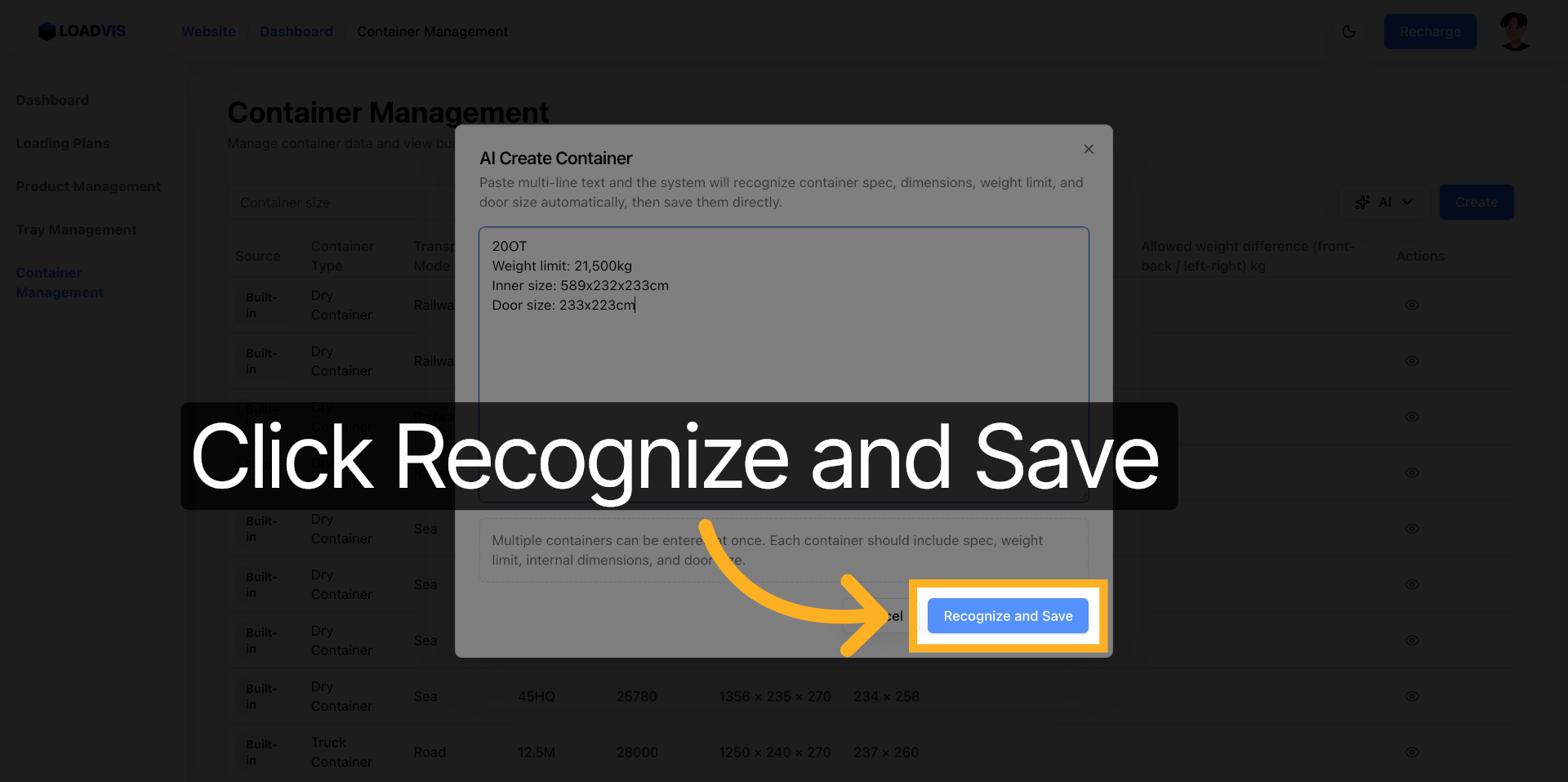
On déclenche la création manuelle ou on active Créer par IA. L’outil parse automatiquement le texte des spécifications. Il ne devine pas. Il structure. La saisie brute du type 20OT Poids max : 21 500 kg Dimensions intérieures : 589×232×233 cm Ouverture de porte : 233×223 cm permet au parser d'isoler chaque métrique. Il mappe les données dans le schéma relationnel du système. La persistance exige une vérification manuelle. La charge utile maximale doit correspondre aux limites contractuelles du transporteur, pas à la résistance théorique de l’acier.
Les dimensions internes (longueur, largeur, hauteur) dictent le volume exploitable. Les cotes d’ouverture (hauteur libre, largeur de porte) verrouillent l’accessibilité réelle. Une fois les champs validés et le bouton Reconnaître et enregistrer actionné, la liste se met à jour. Le calcul asynchrone peut démarrer. Mais l’étape critique reste la Vue Guide. Elle ne sert pas à admirer un rendu 3D statique. Elle sert à valider la chronologie d’extraction des unités de charge. Elle impose un ordonnancement séquentiel.
Pertinence opérationnelle & limites de l’outil
Remplir un formulaire n’est pas une fin en soi. C’est un alignement forcé entre le modèle algorithmique et la topographie physique du site. La hauteur d’ouverture détermine si la première rangée passe sans casser les angles. La précision du barycentre conditionne la stabilité du châssis routier sous freinage d'urgence. Le croisement volume/masse évite les pénalités d’essieu aux postes de contrôle. L’outil sécurise le calcul sous contraintes et génère des vues séquencées. Il ne remplace rien. Absolument rien.
Le rayon de braquage du transpalette reste à vérifier sur le béton réel de l’entrepôt. Les tolérances d’empilage varient selon l’usure du film étirable et le vieillissement des cartons. L’arbitrage final sur la séquence de déchargement prioritaire relève exclusivement du responsable entrepôt. Ces données sont contextuelles. Elles nécessitent un recoupement terrain systématique. L'IA structure les entrées. L'expérience locale valide les sorties. La machine ne connaît pas les habitudes de dégroupage de la zone de réception. Elle calcule. Elle ne décide pas.
Comparaison : Approche standard vs Approche structurée
Prenons deux chemins d’intégration. Le premier suit la voie de la résistance minimale. Template figé. Charge maximale théorique saisie sans recoupement. Validation uniquement sur la rotation 3D standard. Aucune contrainte de séquence activée. Conséquence immédiate : blocages physiques au dégroupage. Risques de basculement. Immobilisation prolongée du matériel roulant. Coûts cachés exponentiels. Le plan est mathématiquement parfait. Il est physiquement inapplicable.
La seconde méthode impose une discipline stricte. Recalibrage systématique. Mesures physiques injectées via saisie directe ou parsing IA. Cotes de porte intégrées comme des contraintes dures, pas des suggestions. Indicateurs volume et poids croisés avant validation. Arbitrage opéré via la vue Guide pour séquencer l’accessibilité selon l’ordre de livraison réel. Le résultat diffère radicalement. Le plan devient exécutable. Le taux de remplissage baisse parfois de 8 %. La fiabilité opérationnelle grimpe. Le compromis est mathématique. Il est inévitable. On échange du volume théorique contre de la fluidité réelle.
Portée de l’outil et validation manuelle
La génération de plans sous contraintes fonctionne en arrière-plan. Le traitement asynchrone évite de bloquer l’interface pendant la résolution des algorithmes d’empaquetage 3D binaires ou heuristiques. L’outil digère les données. Il renvoie une matrice de placement. La responsabilité ne disparaît pas pour autant. Elle se déplace. Elle passe de la configuration logicielle à la vérification physique du matériel et des tolérances d’emballage. Aucune API ne mesure l’usure réelle d’une palette EURO. Aucun modèle ne devine l’inclinaison du sol au fond du hangar. Ces paramètres restent conditionnels. Ils exigent un contrôle manuel rigoureux. L’écart se comble par l’hybridation : calcul machine pour l’optimisation, jugement humain pour la faisabilité. Le terrain garde toujours le dernier mot.